一种混合饲料垛码机的制作方法
1.本实用新型涉及垛码机技术领域,具体是一种混合饲料垛码机。
背景技术:
2.混合饲料是由各种饲料原料经过简单加工混合而成,为初级配合饲料,主要考虑能量,蛋白质、钙、磷等营养指标。在许多农村地区常见。
3.饲料加工的最后一套工序是对成品饲料的打包,特别是微量复合预混合的饲料,在生产过程中气体较多,为了节省空间以及方便运输,现有的对成品饲料的打包需要多人将蓬松的成品饲料挤压后,再通过打包带捆住,再通过打包器对成品饲料进行打包,这种传统的依靠人力挤压不仅费时费力,且人力挤压打包的挤压力有限,打包的也较为蓬松,不利于成品饲料后期的空间利用以及运输,因此需要设计一种用于复合预混合饲料的打包机来解决上述问题。
技术实现要素:
4.本实用新型的目的在于提供一种混合饲料垛码机,以解决上述背景技术中提出的问题。
5.本实用新型的技术方案是:包括两个并列的打包机、皮带运输机一、皮带运输机二、推送机、震动运输机、挤压机以及排泄机,所述皮带运输机一用于传输所述打包机输出的打包件,所述皮带运输机一远离打包机的一端设置有皮带运输机二,所述推送机设置于所述皮带运输机二远离皮带运输机一一端,所述震动运输机安装于其中一个所述皮带运输机二的一侧,所述挤压机安装于所述震动运输机远离其所在皮带运输机二一侧的一端,另一个所述皮带运输机二的一侧安装有运输机,所述排泄机设置于所述运输机远离其所在皮带运输机二的一端位置处,所述排泄机远离运输机的一端和震动运输机远离其所在皮带运输机二的一侧均安装有抓取台,与所述震动运输机连接的抓取台两端和与排泄机连接的抓取台两侧均放置有光电组件,两个所述抓取台之间放置有机械手总成。
6.进一步的,所述机械手总成包括放置架、三百六十度旋转机、升降机、三轴机械臂和齿形抓包机械手,所述三百六十度旋转机通过固定螺栓固定在放置架的顶部,所述升降机安装在三百六十度旋转机的旋转端上,所述三轴机械臂安装在升降机的升降端上,所述齿形抓包机械手安装三轴机械臂的工作端上。
7.进一步的,所述光电组件包括光电开关和反光板,所述光电开关和反光板分别置于抓取台的两侧上。
8.进一步的,与所述排泄机连接的抓取台远离机械手总成的一侧和机械手总成一端位置均放置有挡网。
9.进一步的,所述皮带运输机二顶部位于皮带的两侧均通过螺钉固定有等距分布的定位柱,所述定位柱面向皮带的一侧外壁开设有等距离分布的滑孔,所述滑孔一端外壁开设有螺纹孔,所述滑孔的内壁滑动安装有活动杆。
10.进一步的,与推送机在同一侧且同一高度多个活动杆的一端头固定有第一护栏,另一侧上同一高度多个所述活动杆的一端头固定有第二护栏,所述第一护栏和第二护栏相互靠近。
11.进一步的,所述皮带运输机一与所述皮带运输机二为同一皮带运输机。
12.本实用新型通过改进在此提供一种混合饲料垛码机,与现有技术相比,具有如下改进及优点:
13.本实用新型确定好活动杆的位置,通过定位螺栓进行固定,从而调节第一护栏和第二护栏之间的距离,打包机对成品进行打包,打包完成后,由皮带运输机一运输至皮带运输机二上,然后被第一护栏和第二护栏进行挤压,将空气挤出,成品包装袋通过震动运输机时,震动运输机加速成品包装袋内的空气排放,当成品包装袋到震动传送带尾端时,还挤压机对成品包装袋内的空气进行挤压排放,另一侧位置处排泄机也对成品包装袋内的空气进行挤压排放,然后将其运输至抓取台,机械手总成通过编程程序进行工作,齿形抓包机械手是抓取微量元素预混合饲料产品包装的机械手,当齿形抓包机械手抓紧微量元素预混合饲料产品后,通过升降机进行高低移动,三百六十度旋转机进行度的方式转动将微量元素预混合饲料产品放到放置板上进行堆包处理,这样无需人工进行码垛,节省人力成本。
附图说明
14.下面结合附图和实施例对本实用新型作进一步解释:
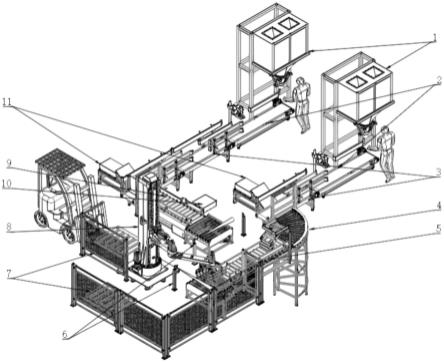
15.图1是本实用新型的流程结构示意图;
16.图2是本实用新型的打包机立体结构示意图;
17.图3是本实用新型的皮带运输机二立体结构示意图;
18.图4是本实用新型的机械手总成立体结构示意图。
19.附图标记说明:
20.1、打包机;2、皮带运输机一;3、皮带运输机二;301、第一护栏;302、第二护栏;3021、定位柱;3022、活动杆;4、运输机;5、排泄机;6、光电组件;7、挡网;8、机械手总成;801、放置架;802、三百六十度旋转机;803、升降机;804、三轴机械臂;805、齿形抓包机械手;9、震动运输机;10、挤压机;11、推送机。
具体实施方式
21.下面对本实用新型进行详细说明,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.本实用新型通过改进在此提供一种混合饲料垛码机,本实用新型的技术方案是:
23.如图1-图4所示,一种混合饲料垛码机,包括两个并列的打包机1、皮带运输机一2、皮带运输机二3、推送机11、震动运输机9、挤压机10以及排泄机5,皮带运输机一2用于传输打包机1输出的打包件,皮带运输机一2远离打包机1的一端设置有皮带运输机二3,推送机设置于皮带运输机二3远离皮带运输机一2一端,震动运输机9安装于其中一个皮带运输机二3的一侧,挤压机10安装于震动运输机9远离其所在皮带运输机二3一侧的一端,另一个皮
带运输机二3的一侧安装有运输机4,排泄机5设置于运输机4远离其所在皮带运输机二3的一端位置处,排泄机5远离运输机4的一端和震动运输机9远离其所在皮带运输机二3的一侧均安装有抓取台,与震动运输机9连接的抓取台两端和与排泄机5连接的抓取台两侧均放置有光电组件6,两个抓取台之间放置有机械手总成8。
24.进一步的,机械手总成8包括放置架801、三百六十度旋转机802、升降机803、三轴机械臂804和齿形抓包机械手805,三百六十度旋转机802通过固定螺栓固定在放置架801的顶部,升降机803安装在三百六十度旋转机802的旋转端上,三轴机械臂804安装在升降机803的升降端上,齿形抓包机械手805安装三轴机械臂804的工作端上,当齿形抓包机械手805抓紧微量元素预混合饲料产品后,通过升降机803进行高低移动,三百六十度旋转机802进行360度的方式转动将微量元素预混合饲料产品放到放置板上进行堆包处理。
25.进一步的,光电组件6包括光电开关和反光板,光电开关和反光板分别置于抓取台的两侧上,光电开关和反光板均通过信号线与电源控制器进行连接,如果有工人进入生产线,遮挡光电开关的光源,则光电开关传递信号给电源控制器,进行电源关闭。
26.进一步的,与排泄机5连接的抓取台远离机械手总成8的一侧和机械手总成8一端位置均放置有挡网7,防止微量元素预混合饲料产品掉出抓取台。
27.进一步的,皮带运输机二3顶部位于皮带的两侧均通过螺钉固定有等距分布的定位柱3021,定位柱3021面向皮带的一侧外壁开设有等距离分布的滑孔,滑孔一端外壁开设有螺纹孔,滑孔的内壁滑动安装有活动杆3022,确定好活动杆3022的位置,可通过定位螺栓进行固定。
28.进一步的,与推送机11在同一侧且同一高度多个活动杆3022的一端头固定有第一护栏301,另一侧上同一高度多个活动杆3022的一端头固定有第二护栏302,第一护栏301和第二护栏302相互靠近,从而调节第一护栏301和第二护栏302之间的距离,第一护栏301和第二护栏302相互配合可以防止包装袋倾倒,同时防止微量元素预混合饲料产品掉出传送带上。
29.进一步的,皮带运输机一2与皮带运输机二3为同一皮带运输机。
30.工作原理:确定好活动杆3022的位置,通过定位螺栓进行固定,从而调节第一护栏301和第二护栏302之间的距离,打包机1对成品进行打包,打包完成后,由皮带运输机一2运输至皮带运输机二3上,然后被第一护栏301和第二护栏302进行挤压,将空气挤出,成品包装袋通过震动运输机9时,震动运输机9加速成品包装袋内的空气排放,当成品包装袋到震动传送带尾端时,还挤压机10对成品包装袋内的空气进行挤压排放,另一侧位置处排泄机5也对成品包装袋内的空气进行挤压排放,然后将其运输至抓取台,机械手总成8通过编程程序进行工作,齿形抓包机械手805是抓取微量元素预混合饲料产品包装的机械手,当齿形抓包机械手805抓紧微量元素预混合饲料产品后,通过升降机803进行高低移动,三百六十度旋转机802进行360度的方式转动将微量元素预混合饲料产品放到放置板上进行堆包处理。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1