门式起重机的伸缩臂的制作方法
1.本实用新型涉及伸缩臂领域,特别涉及门式起重机的伸缩臂。
背景技术:
2.门式起重机,又叫龙门吊,是桥式起重机的一种变形,主要用于室外的货场、料场货、散货的装卸作业,其金属结构像门形框架,承载主梁下安装两条支脚,可以直接在地面的轨道上行走,主梁两端可以具有外伸悬臂梁,具有场地利用率高、作业范围大、适应面广、通用性强等特点,随着门式起重机对货物进行吊升时,其重心会逐渐升高,重心升高其稳定性降低,并且门式起重机的支撑臂高度固定,可以根据起吊货物的高度对横梁的高度进行调节,从而降低其实用性能。
技术实现要素:
3.针对现有技术的不足,本实用新型提供了门式起重机的伸缩臂。
4.为实现上述目的,本实用新型提供了如下技术方案:
5.门式起重机的伸缩臂,包括两个支撑臂,所述支撑臂的外壁滑动套接有支撑套筒,两个所述支撑套筒的顶部固定连接有横梁,所述横梁上设置有升降装置,两个所述支撑套筒相背的一侧均设置有定位组件;
6.所述升降装置包括两个连接螺杆和传动轴,所述连接螺杆外壁的顶部与支撑套筒转动穿插套接,所述支撑臂的顶部开设有螺纹槽,所述连接螺杆外壁的底部与螺纹槽的内腔螺纹穿插套接。
7.优选的,所述横梁的两端均开设有承载槽,所述传动轴的外壁与横梁转动穿插套接,所述传动轴外壁的两端均固定套接有第二换向齿轮。
8.优选的,所述连接螺杆的外壁固定套接有限位套环,所述限位套环的顶部与支撑套筒内壁的顶部相贴合,所述连接螺杆外壁的顶部穿过横梁固定套接有第一换向齿轮,所述第一换向齿轮与第二换向齿轮啮合连接。
9.优选的,两个所述承载槽内腔相背的一端均开设有安装槽,所述安装槽的内腔滑动套接有密封板,所述传动轴外壁的两端分别与两个密封板转动穿插套接。
10.优选的,两个所述密封板相背的一侧均呈环形阵列设置有多个内螺栓,所述密封板通过内螺栓与横梁固定连接,其中一个所述密封板的一侧固定连接有伺服电机,所述伺服电机的输出端与传动轴传动连接。
11.优选的,所述定位组件包括定位杆,所述定位杆滑动穿插套接于支撑套筒一侧的底部,两个所述支撑臂相背的一侧均等距开设有多个定位槽,所述定位杆外壁的一端与定位槽的内腔滑动卡接,两个所述支撑套筒相背一侧的底部均固定连接有气缸,所述气缸的输出端与定位杆传动连接。
12.优选的,所述支撑臂的底部固定连接有底座,所述横梁的底部安装有起重吊钩本体。
13.本实用新型的优点为:
14.(1)本实用新型利用支撑臂、支撑套筒和升降装置的配合使用,升降装置包括两个连接螺杆和传动轴,从而转动轴转动,就可以使两个连接螺杆同步同向转动,使两个支撑套筒在支撑臂的外壁滑动,进而改变横梁的高度,从而提高其实用性能;
15.(2)本实用新型定位组件的设置方式,定位组件包括定位杆和气缸,定位杆和气缸可以跟随支撑套筒上下移动,从而气缸可以带动定位杆与相对应的定位槽滑动套接,进而对支撑套筒和支撑臂进行位置限定,进而保证横梁工作时的稳定性。
附图说明
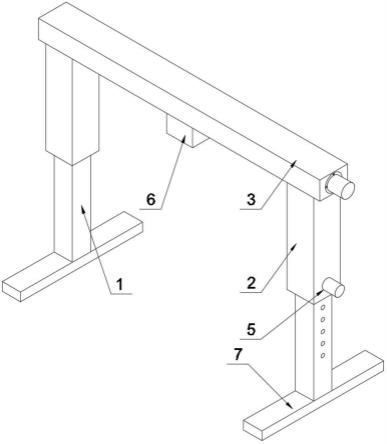
16.图1为本实施例所提供的整体结构示意图;
17.图2为本实施例所提供的正面内部结构示意图;
18.图3为本实施例所提供的横梁正面部分内部结构示意图。
具体实施方式
19.结合图1至图3对本实用新型门式起重机的伸缩臂作进一步的说明。
20.包括两个支撑臂1,支撑臂1的外壁滑动套接有支撑套筒2,两个支撑套筒2的顶部固定连接有横梁3,支撑臂1的底部固定连接有底座7,横梁3的底部安装有起重吊钩本体6,横梁3上设置有升降装置4,两个支撑套筒2相背的一侧均设置有定位组件5。
21.升降装置4包括两个连接螺杆41和传动轴46,连接螺杆41外壁的顶部与支撑套筒2转动穿插套接,支撑臂1的顶部开设有螺纹槽42,连接螺杆41外壁的底部与螺纹槽42的内腔螺纹穿插套接,横梁3的两端均开设有承载槽44,传动轴46的外壁与横梁3转动穿插套接,传动轴46外壁的两端均固定套接有第二换向齿轮47,连接螺杆41的外壁固定套接有限位套环43,限位套环43的顶部与支撑套筒2内壁的顶部相贴合,连接螺杆41外壁的顶部穿过横梁3固定套接有第一换向齿轮45,两第二换向齿轮47均位于第一换向齿轮45顶部的一侧,从而传动轴46转动,就可以使两个连接螺杆41同步同向转动,第一换向齿轮45与第二换向齿轮47啮合连接。
22.两个承载槽44内腔相背的一端均开设有安装槽,安装槽的内腔滑动套接有密封板48,传动轴46外壁的两端分别与两个密封板48转动穿插套接,两个密封板48相背的一侧均呈环形阵列设置有多个内螺栓49,密封板48通过内螺栓49与横梁3固定连接,其中一个密封板48的一侧固定连接有伺服电机410,伺服电机410的输出端与传动轴46传动连接。
23.定位组件5包括定位杆51,定位杆51滑动穿插套接于支撑套筒2一侧的底部,两个支撑臂1相背的一侧均等距开设有多个定位槽52,定位杆51外壁的一端与定位槽52的内腔滑动卡接,从而可以保证支撑臂1与支撑套筒2的稳定性,避免横梁3底部的起重吊钩本体6工作时,横梁3上的重力作用在连接螺杆41上,对其造成损坏,两个支撑套筒2相背一侧的底部均固定连接有气缸53,气缸53的输出端与定位杆51传动连接,支撑臂1的背面设置有刻度,从而支撑套筒2相对支撑臂1上下滑动一定的距离时,便于判断定位杆51是否与支撑臂1一侧的定位槽52相对应。
24.气缸53和伺服电机410分别通过外接的气缸开关和伺服电机开关与外部电源电性连接。
25.本实用新型工作原理:
26.当需要改变横梁3的高度时,首先使气缸53带动定位杆51与支撑臂1上的定位槽52分离,然后使伺服电机410带动传动轴46转动,传动轴46带动两个第二换向齿轮47同步转动,两个第二换向齿轮47带动两个第一换向齿轮45转动,从而使两个连接螺杆41同步同向转动,从而连接螺杆41带动支撑套筒2在支撑臂1的外壁滑动,进而使两个支撑套筒2带动横梁3上下移动,直至其移动到一定的位置时,使气缸53带动定位杆51移动,使定位杆51与支撑臂1一侧相对应的定位槽52滑动套接,从而对支撑臂1和支撑套筒2进行位置限定,进而保证横梁3工作时的稳定性。
27.如无特殊说明,本实用新型中,若有术语“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系是基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此本实用新型中描述方位或位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以结合附图,并根据具体情况理解上述术语的具体含义。
28.除非另有明确的规定和限定,本实用新型中,若有术语“设置”、“相连”及“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
29.以上所述仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1