一种大蒜加工用的智能转运装置的制作方法
1.本发明涉及大蒜转运设备领域,具体的说是一种大蒜加工用的智能转运装置。
背景技术:
2.大蒜为百合科葱属植物的地下鳞茎。大蒜整棵植株具有强烈辛辣的蒜臭味,蒜头、蒜叶和花薹均可作蔬菜食用,不仅可作调味料,而且可入药,是著名的食药两用植物。大蒜鳞茎中含有丰富的蛋白质、低聚糖和多糖类、另外还有脂肪、矿物质等。大蒜具有多方面的生物活性,如防治心血管疾病、抗肿瘤及抗病原微生物等,长期食用可起到防病保健作用。大蒜的加工越来越发达,大蒜在加工时需要使用到物流转运装置。
3.然而,现有的转运装置基本采用倾斜架设进行输送,占用场地较大,体积较大的运输装置不便于灵活运输和转移场地,需要现场拆卸组装,极大的降低了使用灵活性,及其不便于运用在空间有限的室内,局限使用场合范围。
技术实现要素:
4.针对现有技术中的问题,本发明提供了一种大蒜加工用的智能转运装置。
5.本发明解决其技术问题所采用的技术方案是:一种大蒜加工用的智能转运装置,包括输送机构,所述输送机构内部设有升降机构,所述输送机构的外侧转动连接有对接机构,所述输送机构的底端安装有伸展机构,所述伸展机构上连接有支撑机构。
6.具体的,所述输送机构包括底板,底板上焊接有箱体,所述箱体的顶端滑动连接有伸缩箱,所述箱体的内部设有第一转轮,所述伸缩箱的内部转动连接有第二转轮,所述伸缩箱的外侧安装有第一电机,所述第一电机驱动第二转轮,所述第一转轮和第二转轮之间缠绕有循环带。
7.具体的,所述箱体的内部焊接有两组轨道,所述轨道和循环带之间滑动连接,所述循环带上连接有多个转运板。
8.具体的,所述升降机构包括第一固定板,所述伸缩箱的底端固定连接有第一固定板,所述箱体的内部滑动连接有第二固定板,所述第一固定板上螺纹连接有第一丝杆,所述第二固定板上螺纹连接有第二丝杆。
9.具体的,所述第一丝杆和第二丝杆的端部分别连接有一个第一齿轮,两个所述第一齿轮之间共同啮合有第二齿轮,所述第二齿轮的中部固定连接有第一转轴,所述第一转轴转动连接箱体且一端延伸至所述箱体的外部,所述第一转轴的端部安装有转盘,所述箱体内部安装有第二电机,所述第二电机的端部啮合连接第二齿轮。
10.具体的,所述对接机构包括进料口,所述箱体的一侧开设有进料口,所述伸缩箱的一侧开设有出料口,所述伸缩箱靠近出料口的外侧转动连接有输送板,所述输送板的底端抵触有第一支撑杆,所述第一支撑杆的底端转动连接伸缩箱。
11.具体的,所述箱体靠近进料口外侧转动连接有搭板,所述搭板的两侧分别转动连接有护板,所述搭板的底端转动连接有第二支撑杆,所述第二支撑杆的底端转动连接有抓
地板,所述箱体的外侧转动连接有限位块。
12.具体的,所述伸展机构包括伸缩板,所述箱体的底部滑动连接有两组伸缩板,每组所述伸缩板设有两个,同一组所述伸缩板之间啮合有第三齿轮,所述第三齿轮中部固定连接有第二转轴,所述箱体上安装有第三电机,所述第三电机的两端和所述第二转轴的底端均固定连接有第四齿轮,两个相互靠近的第四齿轮之间相互啮合,所述伸缩板上焊接有加强筋。
13.具体的,所述支撑机构包括连接块,所述伸缩板位于所述箱体外部的一端转动连接有连接块,所述连接块的一侧固定连接有杠杆且另外一侧固定连接有抵触杆。
14.具体的,所述伸缩板上滑动连接有第三支撑杆,所述抵触杆抵触在第三支撑杆上,所述第三支撑杆上抵触有限位杆,所述限位杆滑动连接伸缩板且一端焊接有拉环,所述第三支撑杆的底端活动连接有垫板。
15.本发明的有益效果是:(1)本发明所述的一种大蒜加工用的智能转运装置,通过输送机构和升降机构的设置进而便于将大蒜从低往高处输送,且能够根据加工设备高度进行主动调节,大大的提高了装置的适用性,方便灵活的运用对接到不同高度的设备,输送机构上转动连接有对接机构,通过对接机构的设置进而便于搭建输送通道,可折叠的输送组件减小了装置的体积,避免占用过多的空间,方便在室内使用,即:在使用装置运输大蒜时,首先将装置移动到使用的场合,通过伸展机构和支撑机构将装置平稳的安置在地面上,启动第二电机,通过第二电机啮合第二齿轮转动,第二齿轮带动两个第一齿轮同步转动,则第一丝杆推动第一固定板提升高度,同步的第二丝杆驱动第二固定板移动到靠近第二电机所在的位置,进而在伸缩箱提升高度的同时,循环带的一部分跟随转移到伸缩箱的内部,保持循环带在移动时依然能够被第一转轮和第二转轮张紧,转运板始终倾斜垂直于循环带,方便大蒜从进料口安置到转运板上,最终提升到出料口排出到达指定的设备,出料口上对接有输送板,输送板通过第一支撑杆支撑起来,输送板背离出料口的一端低于出料口的一端,从而便于蒜头自动滚落到设备中,在折叠收纳输送板时,则直接将第一支撑杆的顶端脱离输送板,让输送板和第一支撑板自动垂落到贴近伸缩箱的侧壁,在收纳搭板时,则将第二支撑杆折叠到平行搭板的位置,此时护板不在被第二支撑杆所支撑,自然展开到搭板的两侧,此时转动搭板卡合到限位块上,从而可以完成对输送板和搭板的折叠收纳,进而大大的减小了装置的体积,方便运输装置到有限空间的室内使用,提高了装置的广泛适用性。
16.(2)本发明所述的一种大蒜加工用的智能转运装置,输送机构的底端安装有伸缩机构,通过伸缩机构的设置进而便于将伸缩机构伸展到装置的外侧,增大装置的支撑能力,且便于对伸缩机构进行收纳,通过伸缩机构的设置进而便于对装置起到支撑作用,提高装置的抗倾倒能力,保证装置的使用安全,即:在需要展开伸缩板时,则启动第三电机,第三电机通过第四齿轮同步带动两个第二转轴转动,第二转轴啮合两侧的伸缩板,使多个伸缩板延伸到外侧,当伸缩板移动到合适的位置后,反复摆动杠杆,杠杆带动抵触杆反复抵触第三支撑杆,使第三支撑杆往底端移动支撑地面,从而使装置的支撑点增多,保障装置的稳定性,提高其抗倾倒能力,限位杆在弹簧的抵触下始终保持第三支撑杆单向移动,最终第三支撑杆通过垫片抵触到地面上,通过垫片的设置从而增大了第三支撑杆和地面之间的接触面积,减小单位面积的压强,保障装置的稳定效果,垫板和第三支撑杆采用活动连接,垫板可
以根据地面的角度自适应接触地面,在需要收纳第三支撑杆时,则通过拉环拽动限位杆,使限位杆的端部不在抵触第三支撑杆,解除对第三支撑杆的限位,便于折叠展开的收纳设计提高了装置的可使用场合量,提高了装置的使用效果。
附图说明
17.下面结合附图和实施例对本发明进一步说明。
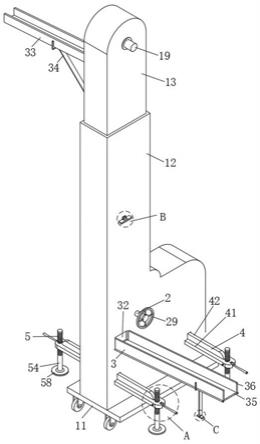
18.图1为本发明提供的一种大蒜加工用的智能转运装置的较佳实施例的整体结构的结构示意图;图2为图1所示的输送机构和升降机构的连接结构示意图;图3为图1所示的输送机构和伸展机构的连接结构示意图;图4为图3所示的伸展机构的结构示意图;图5为图1所示的伸展机构和支撑机构的连接结构示意图;图6为图5所示的伸展机构和支撑机构的连接结构示意图;图7为图1所示的a部放大结构示意图;图8为图1所示的b部放大结构示意图;图9为图1所示的c部放大结构示意图。
19.图中:1、输送机构,11、底板,12、箱体,13、伸缩箱,14、第一转轮,15、第二转轮,16、循环带,17、转运板,18、轨道,19、第一电机,2、升降机构,21、第一固定板,22、第一丝杆,23、第二固定板,24、第二丝杆,25、第一齿轮,26、第二齿轮,27、第二电机,28、第一转轴,29、转盘,3、对接机构,31、出料口,32、进料口,33、输送板,34、第一支撑杆,35、搭板,36、护板,37、第二支撑杆,38、抓地板,39、限位块,4、伸展机构,41、伸缩板,42、加强筋,43、第三齿轮,44、第二转轴,45、第四齿轮,46、第三电机,5、支撑机构,51、连接块,52、杠杆,53、抵触杆,54、第三支撑杆,55、限位杆,56、弹簧,57、拉环,58、垫板。
具体实施方式
20.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
21.如图1-图9所示,本发明所述的一种大蒜加工用的智能转运装置,包括输送机构1,所述输送机构1内部设有升降机构2,所述输送机构1的外侧转动连接有对接机构3,所述输送机构1的底端安装有伸展机构4,所述伸展机构4上连接有支撑机构5。
22.具体的,所述输送机构1包括底板11,底板11上焊接有箱体12,所述箱体12的顶端滑动连接有伸缩箱13,所述箱体12的内部设有第一转轮14,所述伸缩箱13的内部转动连接有第二转轮15,所述伸缩箱13的外侧安装有第一电机19,所述第一电机19驱动第二转轮15,所述第一转轮14和第二转轮15之间缠绕有循环带16。
23.具体的,所述箱体12的内部焊接有两组轨道18,所述轨道18和循环带16之间滑动连接,所述循环带16上连接有多个转运板17。
24.具体的,所述升降机构2包括第一固定板21,所述伸缩箱13的底端固定连接有第一固定板21,所述箱体12的内部滑动连接有第二固定板23,所述第一固定板21上螺纹连接有第一丝杆22,所述第二固定板23上螺纹连接有第二丝杆24。
25.具体的,所述第一丝杆22和第二丝杆24的端部分别连接有一个第一齿轮25,两个所述第一齿轮25之间共同啮合有第二齿轮26,所述第二齿轮26的中部固定连接有第一转轴28,所述第一转轴28转动连接箱体12且一端延伸至所述箱体12的外部,所述第一转轴28的端部安装有转盘29,所述箱体12内部安装有第二电机27,所述第二电机27的端部啮合连接第二齿轮26。
26.具体的,所述对接机构3包括进料口32,所述箱体12的一侧开设有进料口32,所述伸缩箱13的一侧开设有出料口31,所述伸缩箱13靠近出料口31的外侧转动连接有输送板33,所述输送板33的底端抵触有第一支撑杆34,所述第一支撑杆34的底端转动连接伸缩箱13。
27.具体的,所述箱体12靠近进料口32外侧转动连接有搭板35,所述搭板35的两侧分别转动连接有护板36,所述搭板35的底端转动连接有第二支撑杆37,所述第二支撑杆37的底端转动连接有抓地板38,所述箱体12的外侧转动连接有限位块39;通过所述输送机构1和所述升降机构2的设置进而便于将大蒜从低往高处输送,且能够根据加工设备高度进行主动调节,大大的提高了装置的适用性,方便灵活的运用对接到不同高度的设备,所述输送机构1上转动连接有对接机构3,通过所述对接机构3的设置进而便于搭建输送通道,可折叠的输送组件减小了装置的体积,避免占用过多的空间,方便在室内使用,即:在使用装置运输大蒜时,首先将装置移动到使用的场合,通过所述伸展机构4和所述支撑机构5将装置平稳的安置在地面上,启动所述第二电机27,通过所述第二电机27啮合所述第二齿轮26转动,所述第二齿轮26带动两个所述第一齿轮25同步转动,则所述第一丝杆22推动所述第一固定板21提升高度,同步的所述第二丝杆24驱动所述第二固定板23移动到靠近所述第二电机27所在的位置,进而在所述伸缩箱13提升高度的同时,所述循环带16的一部分跟随转移到所述伸缩箱13的内部,保持所述循环带16在移动时依然能够被所述第一转轮14和所述第二转轮15张紧,所述转运板17始终倾斜垂直于所述循环带16,方便大蒜从所述进料口32安置到所述转运板17上,最终提升到所述出料口31排出到达指定的设备,所述出料口32上对接有所述输送板33,所述输送板33通过所述第一支撑杆34支撑起来,所述输送板33背离所述出料口32的一端低于所述出料口32的一端,从而便于蒜头自动滚落到设备中,在折叠收纳所述输送板33时,则直接将所述第一支撑杆34的顶端脱离所述输送板33,让所述输送板33和所述第一支撑板34自动垂落到贴近所述伸缩箱13的侧壁,在收纳所述搭板35时,则将所述第二支撑杆37折叠到平行所述搭板35的位置,此时所述护板36不在被所述第二支撑杆37所支撑,自然展开到所述搭板35的两侧,此时转动所述搭板35卡合到所述限位块39上,从而可以完成对所述输送板33和所述搭板35的折叠收纳,进而大大的减小了装置的体积,方便运输装置到有限空间的室内使用,提高了装置的广泛适用性。
28.具体的,所述伸展机构4包括伸缩板41,所述箱体12的底部滑动连接有两组伸缩板41,每组所述伸缩板41设有两个,同一组所述伸缩板41之间啮合有第三齿轮43,所述第三齿轮43中部固定连接有第二转轴44,所述箱体12上安装有第三电机46,所述第三电机46的两端和所述第二转轴44的底端均固定连接有第四齿轮45,两个相互靠近的第四齿轮45之间相互啮合,所述伸缩板41上焊接有加强筋42。
29.具体的,所述支撑机构5包括连接块51,所述伸缩板41位于所述箱体12外部的一端转动连接有连接块51,所述连接块51的一侧固定连接有杠杆52且另外一侧固定连接有抵触
杆53。
30.具体的,所述伸缩板41上滑动连接有第三支撑杆54,所述抵触杆53抵触在第三支撑杆54上,所述第三支撑杆54上抵触有限位杆55,所述限位杆55滑动连接伸缩板41且一端焊接有拉环57,所述第三支撑杆54的底端活动连接有垫板58;所述输送机构1的底端安装有伸缩机构4,通过所述伸缩机构4的设置进而便于将所述伸缩机构4伸展到装置的外侧,增大装置的支撑能力,且便于对所述伸缩机构4进行收纳,通过所述伸缩机构4的设置进而便于对装置起到支撑作用,提高装置的抗倾倒能力,保证装置的使用安全,即:在需要展开所述伸缩板41时,则启动所述第三电机46,所述第三电机46通过所述第四齿轮45同步带动两个所述第二转轴44转动,所述第二转轴44啮合两侧的所述伸缩板41,使多个所述伸缩板41延伸到外侧,当所述伸缩板41移动到合适的位置后,反复摆动所述杠杆52,所述杠杆52带动所述抵触杆53反复抵触所述第三支撑杆54,使所述第三支撑杆54往底端移动支撑地面,从而使装置的支撑点增多,保障装置的稳定性,提高其抗倾倒能力,所述限位杆55在所述弹簧56的抵触下始终保持所述第三支撑杆54单向移动,最终所述第三支撑杆54通过所述垫片58抵触到地面上,通过所述垫片58的设置从而增大了所述第三支撑杆54和地面之间的接触面积,减小单位面积的压强,保障装置的稳定效果,所述垫板58和所述第三支撑杆54采用活动连接,所述垫板58可以根据地面的角度自适应接触地面,在需要收纳所述第三支撑杆54时,则通过所述拉环57拽动所述限位杆55,使所述限位杆55的端部不在抵触所述第三支撑杆54,解除对所述第三支撑杆54的限位,便于折叠展开的收纳设计提高了装置的可使用场合量,提高了装置的使用效果。
31.本发明在使用时,在使用装置运输大蒜时,首先将装置移动到使用的场合,通过伸展机构4和支撑机构5将装置平稳的安置在地面上,启动第二电机27,通过第二电机27啮合第二齿轮26转动,第二齿轮26带动两个第一齿轮25同步转动,则第一丝杆22推动第一固定板21提升高度,同步的第二丝杆24驱动第二固定板23移动到靠近第二电机27所在的位置,进而在伸缩箱13提升高度的同时,循环带16的一部分跟随转移到伸缩箱13的内部,保持循环带16在移动时依然能够被第一转轮14和第二转轮15张紧,转运板17始终倾斜垂直于循环带16,方便大蒜从进料口32安置到转运板17上,最终提升到出料口31排出到达指定的设备,出料口32上对接有输送板33,输送板33通过第一支撑杆34支撑起来,输送板33背离出料口32的一端低于出料口32的一端,从而便于蒜头自动滚落到设备中,在折叠收纳输送板33时,则直接将第一支撑杆34的顶端脱离输送板33,让输送板33和第一支撑板34自动垂落到贴近伸缩箱13的侧壁,在收纳搭板35时,则将第二支撑杆37折叠到平行搭板35的位置,此时护板36不在被第二支撑杆37所支撑,自然展开到搭板35的两侧,此时转动搭板35卡合到限位块39上,从而可以完成对输送板33和搭板35的折叠收纳,进而大大的减小了装置的体积,方便运输装置到有限空间的室内使用,提高了装置的广泛适用性;在需要展开伸缩板41时,则启动第三电机46,第三电机46通过第四齿轮45同步带动两个第二转轴44转动,第二转轴44啮合两侧的伸缩板41,使多个伸缩板41延伸到外侧,当伸缩板41移动到合适的位置后,反复摆动杠杆52,杠杆52带动抵触杆53反复抵触第三支撑杆54,使第三支撑杆54往底端移动支撑地面,从而使装置的支撑点增多,保障装置的稳定性,提高其抗倾倒能力,限位杆55在弹簧56的抵触下始终保持第三支撑杆54单向移动,最终第三支撑杆54通过垫片58抵触到地面上,通过垫片58的设置从而增大了第三支撑杆54和地面之间的接触面积,减小单位面积的
压强,保障装置的稳定效果,垫板58和第三支撑杆54采用活动连接,垫板58可以根据地面的角度自适应接触地面,在需要收纳第三支撑杆54时,则通过拉环57拽动限位杆55,使限位杆55的端部不在抵触第三支撑杆54,解除对第三支撑杆54的限位,便于折叠展开的收纳设计提高了装置的可使用场合量,提高了装置的使用效果。
32.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
33.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1