一种半导体芯片的快速分选编带机装置的制作方法
1.本发明涉及半导体芯片加工技术领域,具体为一种半导体芯片的快速分选编带机装置。
背景技术:
2.半导体芯片的快速分选编带机装置,就是编带机的一种,编带机可以分为半自动和全自动两大类,是把散料元器件产品,通过检测、换向、测试等工位后,放入载带中,随着电子产品的不断升级细化与高度集成,电子元件也从过去的插件式转化成贴片式来节省电路板的安装空间,扩展产品的功能,是电子行业的一次大型革命,编带机的工作原理:编带包装机电和气接好后,如果是热封装的话,让刀升到合适的温度,调节好载带和气源气压,用人工或自动上料设备把smd元件放入载带中,马达转动把盖带成型载带载带拉到封装位置,这个位置盖带在上,载带在下,经过升温的两个刀片压在盖带和载带上,使盖带把载带上面的smd元件口封住,这样就达到了smd元件封装的目的,然后收料盘把封装过的载带卷好,编带机可根据客户生产的需求,提供统一方向,测试产品极性,外观检查、镭射打标等功能,而半导体芯片在加工时就需要使用这种编带机。
3.目前市场上大多数用于半导体芯片的编带机,其采用的是震动盘或者纠偏盘进行上料经过热封装进行编带的方式,但是这种编带机在将半导体芯片从纠偏装置提取到编带装置上进行热封装编带时会产生偏离,并且这种大多数的编带机虽然带有码垛装置却无法将其成品进行打包封装,为此我们提出一种半导体芯片的快速分选编带机装置。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种半导体芯片的快速分选编带机装置,具备精准提取半导体芯片进行编带和快速打包包装成品的优点,解决了上述背景技术中提出的问题。
5.本发明提供如下技术方案:一种半导体芯片的快速分选编带机装置,包括操作台,所述操作台的顶部连接有芯片台,所述芯片台顶部的右侧连接有芯片纠偏装置,所述操作台顶部立板的外部卡接有摆臂,所述操作台顶部立板的左侧和右侧分别活动卡接有芯片定位相机和载带检查相机,所述操作台顶部立板中间的位置设有半圆导环,所述操作台顶部的右侧连接有编带二次调节机构,所述编带二次调节机构的顶部设有编带组合。
6.优选的,所述芯片纠偏装置底部的右侧设有顶针组合,所述编带组合右侧的后方安装有胶膜封口装置,所述编带组合的右端套接有收带卷轴;所述胶膜封口装置的右端套接有胶膜放置盘,所述操作台右端位于胶膜封口装置的下方套接有空载带盘。
7.优选的,所述收带卷轴的后侧安装有走带马达,且走带马达的输出轴安装有皮带,所述胶膜放置盘和收带卷轴之间通过皮带传动连接,所述收带卷轴位于胶膜放置盘的下方,所述收带卷轴、胶膜放置盘和空载带盘均位于操作台的右侧和右侧的上方。
8.优选的,所述操作台顶部的左端设有桥式外开拖链,所述摆臂位于芯片纠偏装置
和编带组合的上方,所述摆臂顶端位于半圆导环的内部,半圆导环分别的左侧位于芯片纠偏装置的上方,半圆导环的右侧位于编带组合的上方。
9.优选的,所述操作台底部的外侧开设有透风板,所述芯片纠偏装置的底板设有蓝膜,所述操作台的底部设有滚轮,所述芯片定位相机位于芯片纠偏装置的上方,所述载带检查相机位于编带组合的上方。
10.优选的,所述操作台顶部立板的顶部设有显示屏,所述操作台顶部立板的外部设有操作面板。
11.优选的,所述芯片定位相机和载带检查相机位于摆臂和半圆导环的上方,且芯片定位相机和载带检查相机与摆臂的运行轨迹不接触。
12.优选的,所述操作台顶部立板的两侧安装有排气扇,且排气扇的上方开设有排气孔。
13.优选的,还包括动态平衡装置,所述动态平衡装置设于所述芯片纠偏装置底部,且位于顶针组合和编带二次调节机构之间,所述动态平衡装置包括支撑柱组件和调平组件,所述支撑柱组件下端与所述操作台台面固定连接,所述支撑柱组件上端与所述调平组件卡接,所述调平组件顶部与所述芯片纠偏装置底部抵接;
14.所述调平组件包括:外壳、平衡盘、驱动组件、连接弹簧、第一连杆、气囊一、第一弹簧、支撑气柱、活塞块一、第一支撑杆、支撑台、齿轮、皮带、第二弹簧、调节杆、转动轴、微调圆盘、空气弹簧一、挡位圆弧块、导气管、第二连杆、l型连杆、气囊二、滚轮、活塞块二、啮合齿、安装槽、空腔、垫块、缓冲球;
15.所述外壳上端中心设置有开口,且所述平衡盘设于所述外壳的开口内,所述外壳左右两侧对称设置空腔,且所述空腔设于所述外壳内;
16.所述空腔中设有连接弹簧和第二连杆,所述连接弹簧两端分别与所述空腔内壁和第二连杆远离所述平衡盘的一侧侧壁固定连接,所述第二连杆靠近所述平衡盘一侧下端设有挡位圆弧块,所述第二连杆远离所述平衡盘一侧下端设有滚轮,所述第二连杆通过所述滚轮与所述空腔下端内壁左右滑动;
17.所述第二连杆远离所述平衡盘一侧上端与l型连杆一端固定连接,所述l型连杆另一端贯穿所述气囊二并与其滑动连接,所述气囊二内嵌于所述外壳内,且位于所述空腔上方,所述气囊二内活动设有所述活塞块二,所述活塞块二与伸入所述气囊二的所述l型连杆固定连接,所述气囊二通过所述导气管与所述空气弹簧一连通;
18.所述空气弹簧一设于所述平衡盘和第二连杆之间,所述空气弹簧一两端分别与所述平衡盘和第二连杆固定连接;
19.所述第一连杆上端贯穿所述外壳内壁并与其上下滑动连接,且所述第一连杆端头呈圆弧状并与所述挡位圆弧块抵接,所述第一连杆下端与所述气囊一顶部固定连接,所述气囊一放置到所述垫块上,所述垫块与所述外壳底部内壁固定连接,所述气囊一内固定设有第一弹簧;
20.所述支撑气柱为中空密封结构,所述气囊一与所述支撑气柱连通,所述支撑气柱内滑动设有所述活塞块一,所述第一支撑杆伸入所述支撑气柱的一端与所述活塞块一固定连接,所述第一支撑杆上端与所述平衡盘底部抵接;
21.所述第一支撑杆靠近所述支撑台的一侧设有若干啮合齿,所述齿轮转动连接于所
述外壳后壁并与所述啮合齿啮合;
22.传动轴一转动连接于所述外壳后壁,所述传动轴一外壁上前后固定套接有所述齿轮和皮带轮一,传动轴二转动连接于所述外壳后壁,所述传动轴二外壁上前后固定套接有所述微调圆盘和皮带轮二,所述皮带轮一和所述皮带轮二通过所述皮带传动连接;
23.围绕所述微调圆盘中心设有若干安装槽,所述安装槽内设有第二弹簧和调节杆,伸入所述安装槽内的调节杆与所述安装槽内壁滑动连接,所述第二弹簧两端分别与伸入所述安装槽内的调节杆的端头和所述安装槽内壁固定连接,所述调节杆远离所述安装槽一端固定连接有缓冲球;
24.所述支撑台下端与所述外壳内壁固定连接,所述支撑台上端与所述平衡盘下端之间留有0.5cm间隙。
25.与现有技术对比,本发明具备以下有益效果:
26.1、该半导体芯片的快速分选编带机装置,通过在操作台顶部立板的中间位置套接的摆臂,当本装置需要从芯片纠偏装置的顶部将芯片提取到编带组合的顶部进行编带时,首先启动摆臂和芯片定位相机,通过芯片定位相机的寻找和定位,使得摆臂的顶端移动到芯片的上方,然后将芯片吸取,并在半圆导环的内径上做圆周移动,然后通过载带检查相机来确定好编带的位置,接着通过编带二次调节机构调整好编带的位置,并通过摆臂将芯片跟随载带检查相机的定位进行摆放,由此提高了本装置在芯片进行拿取和摆放编带时的精准性。
27.2、该半导体芯片的快速分选编带机装置,通过在编带组合右侧的后方安装的胶膜封口装置和收带卷轴,当本装置将芯片编带完成并传送到编带组合的右端后,通过胶膜封口装置将胶膜放置盘内部放置的胶膜封装在芯片编带的表面然后通过收带卷轴的卷绕,将成平封装编带进行缠绕打包,由此使得本装置无需进行设置码垛的同时将成平编带进行快速打包收集,提高了本装置的便捷性。
附图说明
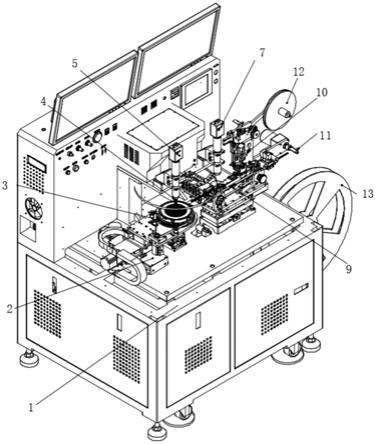
28.图1为本发明结构主视图;
29.图2为本发明结构侧视图;
30.图3为本发明结构正视图;
31.图4为本发明结构左视图;
32.图5为本发明图2中a处的结构放大图;
33.图6为本发明动态平衡装置安装位置示意图;
34.图7为本发明图6中a处的结构放大图;
35.图8为本发明动态平衡装置结构放大图;
36.图9为本发明图8中b处的结构放大图;
37.图10为本发明图8中c处的结构放大图。
38.图中:1、操作台;2、芯片台;3、芯片纠偏装置;4、摆臂;5、芯片定位相机;6、顶针组合;7、载带检查相机;8、编带二次调节机构;9、编带组合;10、胶膜封口装置;11、收带卷轴;12、胶膜放置盘;13、空载带盘;14、动态平衡装置;15、支撑柱组件;16、调平组件;17、外壳;18、平衡盘;19、驱动组件;20、连接弹簧;21、第一连杆;22、气囊一;23、第一弹簧;24、支撑气
柱;25、活塞块一;26、第一支撑杆;27、支撑台;28、齿轮;29、皮带;30、第二弹簧;31、调节杆;32、传动轴二;33、微调圆盘;34、空气弹簧一;35、挡位圆弧块;36、导气管;37、第二连杆;38、l型连杆;39、气囊二;40、滚轮;41、活塞块二;42、啮合齿;43、安装槽;44、空腔;45、垫块;46、缓冲球;47、传动轴一;48、皮带轮一;49、皮带轮二。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.实施例1
41.请参阅图1-2,一种半导体芯片的快速分选编带机装置,包括操作台1,操作台1作为操作台,其负责承载所有装置,并确保编带处于稳定的环境下,操作台1的顶部连接有芯片台2,芯片台2起到了将芯片集中投放到芯片纠偏装置3顶部的作用,芯片台2顶部的右侧连接有芯片纠偏装置3,芯片纠偏装置3作为振动传送纠偏装置,起到了将芯片台2顶部的芯片进行接收并传送到芯片纠偏装置3的顶部以待摆臂4的拿取,操作台1顶部立板的外部卡接有摆臂4,摆臂4作为本装置的主要精确移动结构,保证了将芯片精确的移动到编带组合9的上方用以编带的操作,操作台1顶部立板的左侧活动卡接有芯片定位相机5,芯片定位相机5起到了跟随并定位芯片纠偏装置3顶部芯片的效果,并将所定位芯片的信息传递给摆臂4,确保了摆臂4准确的移动到被芯片定位相机5当前定位芯片的上方,提高了本装置的精准性,芯片纠偏装置3底部的右侧设有顶针组合6,顶针组合6作为分隔结构,起到了将芯片纠偏装置3顶部的芯片进行顶起的操作,确保了摆臂4可以快捷吸附芯片进行传送的效果,操作台1顶部的右侧连接有编带二次调节机构8,编带二次调节机构8作为调节结构,使得空载带盘13内部的空载编带可以快速调节到编带组合9的顶部,用以进行编带,编带二次调节机构8的顶部设有编带组合9,编带组合9作为编带传送的结构,保证了将调节精确后并搭载了芯片的编带对外进行传送的作用,编带组合9右侧的后方安装有胶膜封口装置10,胶膜封口装置10作为本装置的热封结构,确保了将芯片和编带进行热封的效果,编带组合9的右端套接有收带卷轴11,收带卷轴11起到了将编带成品进行收卷打包的效果,避免了本装置收集整理成品编带的效果,提高了本装置的便捷性,胶膜封口装置10的右端套接有胶膜放置盘12,胶膜放置盘12的内部存放有胶膜原料,用以补充胶膜封口装置10内部的原料,确保了胶膜封口装置10内部原料的充足性,操作台1右端位于胶膜封口装置10的下方套接有空载带盘13,空载带盘13的内部搭载有空白编带,用以对本装置进行编带的提供输送,收带卷轴11的后侧安装有走带马达,且走带马达的输出轴安装有皮带,走带马达和皮带的配合使得胶膜放置盘12和收带卷轴11进行同步的转动,确保了本装置的联动性,同时降低了对驱动装置的成本控制,胶膜放置盘12和收带卷轴11之间通过皮带传动连接,收带卷轴11位于胶膜放置盘12的下方,芯片定位相机5和载带检查相机7位于摆臂4和半圆导环的上方,且芯片定位相机5和载带检查相机7与摆臂4的运行轨迹不接触,操作台1顶部立板的两侧安装有排气扇,且排气扇的上方开设有排气孔,排气扇和排气孔用以对本装置的内部进行散热,提高了本装置的安全性。
42.请参阅图3-4,操作台1顶部的左端设有桥式外开拖链,桥式外开拖链确保了将所有的电缆线缆进行统一集装的效果,并且确保了本装置在运作时的便捷性,摆臂4位于芯片纠偏装置3和编带组合9的上方,位于芯片纠偏装置3和编带组合9上方的摆臂4确保了芯片在移动拿取的过程中不会与其他部件产生碰撞,提高了本装置的稳定性,操作台1顶部立板的右侧活动卡接有载带检查相机7,载带检查相机7起到了寻找和定位空载编带的效果,使得载带检查相机7将被定位的编带位置信息传递给摆臂4,确保了摆臂4精确的将芯片搭载到空载编带的顶部,提高了本装置的精准性,收带卷轴11、胶膜放置盘12和空载带盘13均位于操作台1的右侧和右侧的上方,位于操作台1外部右侧的收带卷轴11、胶膜放置盘12和空载带盘13,确保了其在进行封装时不会与编带组合9产生接触,阻碍到编带组合9的运输,底部的外侧开设有透风板,芯片纠偏装置3的底板设有蓝膜,操作台1的底部设有滚轮,芯片定位相机5位于芯片纠偏装置3的上方,位于芯片纠偏装置3上方的芯片定位相机5确保了对整个芯片纠偏装置3的顶部进行全面观测的效果,提高了本装置对芯片定位的精准性,载带检查相机7位于编带组合9的上方,位于编带组合9上方的载带检查相机7确保了对编带组合9顶部编带进行全面监测的效果,提高了本装置定位的精准性,操作台1顶部立板的顶部设有显示屏,操作台1顶部立板的外部设有操作面板。
43.请参阅图5,操作台1顶部立板中间的位置设有半圆导环,半岛圆环起到了限位摆臂4的效果,使得摆臂4的移动轨迹被限定,确保了摆臂4移动时的稳定性,摆臂4顶端位于半圆导环的内部,半圆导环分别的左侧位于芯片纠偏装置3的上方,半圆导环的右侧位于编带组合9的上方。
44.优选的,所述摆臂4上的吸附组件可以为通过在摆臂4上设置负压盒、负压接头和吸附头形成吸附组件用于吸附芯片或者可参阅现有技术:cn201721355109-吸附组件及抓取机构。
45.上述方案的工作原理为:使用时,首先将半导体芯片统一放置在芯片台2的顶部,然后通过芯片纠偏装置3的振动盘将芯片传送到芯片纠偏装置3的顶部,然后启动芯片定位相机5,通过芯片定位相机5的启动,来确定芯片的位置,接着启动摆臂4,由于经过芯片定位相机5的定位,使得摆臂4准确的移动到芯片的上方,此时启动顶针组合6。通过顶针组合6将芯片纠偏装置3顶部位于摆臂4下方的芯片顶起并使得蓝膜与芯片脱离,接着摆臂4将芯片吸附,并在半圆导环的外部进行移动,接着启动编带二次调节机构8,通过编带二次调节机构8将空载带盘13内部的空载编带进行调节移动后,使得空载编带移动到编带组合9的表面,然后启动载带检查相机7,通过载带检查相机7对编带组合9顶部的空载编带进行定位指引,然后继续驱动摆臂4进行移动,使得摆臂4将芯片移动至编带组合9的顶部,然后将载有芯片的编带进行传送,当半成品移动到编带组合9的右侧胶膜封口装置10的下方后,通过胶膜封口装置10将胶膜放置盘12内部的胶膜原料取出并热封在编带的表面,使得芯片和编带被热封装,然后继续传送编带半成品,当成品编带移动到收带卷轴11的左侧后,通过收带卷轴11的收卷缠绕使得成品编带被收卷打包即可。
46.实施例2
47.在实施例1的基础上,请参阅图6-10,还包括动态平衡装置14,所述动态平衡装置14设于所述芯片纠偏装置3底部,且位于顶针组合6和编带二次调节机构8之间,所述动态平衡装置14包括支撑柱组件15和调平组件16,所述支撑柱组件15下端与所述操作台1台面固
定连接,所述支撑柱组件15上端与所述调平组件16卡接,所述调平组件16顶部与所述芯片纠偏装置3底部抵接;
48.所述调平组件16包括:外壳17、平衡盘18、驱动组件19、连接弹簧20、第一连杆21、气囊一22、第一弹簧23、支撑气柱24、活塞块一25、第一支撑杆26、支撑台27、齿轮28、皮带29、第二弹簧30、调节杆31、转动轴32、微调圆盘33、空气弹簧一34、挡位圆弧块35、导气管36、第二连杆37、l型连杆38、气囊二39、滚轮40、活塞块二41、啮合齿42、安装槽43、空腔44、垫块45;缓冲球46;
49.所述外壳17内部空腔44中设有连接弹簧20和第二连杆37,所述连接弹簧20两端分别与所述空腔44内壁和第二连杆37远离所述平衡盘18的一侧侧壁固定连接,所述第二连杆37靠近所述平衡盘18一侧下端设有挡位圆弧块35,所述第二连杆37远离所述平衡盘18一侧下端设有滚轮40,所述第二连杆37通过所述滚轮40与所述空腔44下端内壁左右滑动;
50.所述第二连杆37远离所述平衡盘18一侧上端与l型连杆38一端固定连接,所述l型连杆38另一端贯穿所述气囊二39并与其滑动连接,所述气囊二39内活动设有所述活塞块二41,所述活塞块二41与伸入所述气囊二39的所述l型连杆38固定连接,所述气囊二39通过所述导气管36与所述空气弹簧一34连通;
51.所述空气弹簧一34设于所述平衡盘18和第二连杆37之间,所述空气弹簧一34两端分别与所述平衡盘18和第二连杆37固定连接;
52.所述第一连杆21上端贯穿所述外壳17内壁并与其上下滑动连接,且所述第一连杆21端头呈圆弧状并与所述挡位圆弧块35抵接,所述第一连杆21下端与所述气囊一22顶部固定连接,所述气囊一22放置到所述垫块45上,所述垫块45与所述外壳17底部内壁固定连接,所述气囊一22内固定设有第一弹簧23;
53.所述支撑气柱24为中空密封结构,所述气囊一22与所述支撑气柱24连通,所述支撑气柱24内滑动设有所述活塞块一25,所述第一支撑杆26伸入所述支撑气柱24的一端与所述活塞块一25固定连接,所述第一支撑杆26上端与所述平衡盘18底部抵接;
54.所述第一支撑杆26靠近所述支撑台27的一侧设有若干啮合齿42,所述齿轮28转动连接于所述外壳17后壁并与所述啮合齿42啮合,所述齿轮28的转轴上套接有所述皮带29,所述转动轴32转动连接于所述外壳17后壁,所述转动轴32外壁固定套接有所述微调圆盘33,所述齿轮28与所述微调圆盘33通过所述皮带29传动连接;
55.围绕所述微调圆盘33中心设有若干安装槽43,所述安装槽43内设有第二弹簧30和调节杆31,伸入所述安装槽43内的调节杆31与所述安装槽43内壁滑动连接,所述第二弹簧30两端分别与伸入所述安装槽43内的调节杆31的端头和所述安装槽43内壁固定连接,远离所述安装槽43的所述调节杆31端头固定连接有缓冲球46;
56.所述支撑台27下端与所述外壳17内壁固定连接,所述支撑台27上端与所述平衡盘18下端之间留有0.5cm间隙。
57.可选的,所述支撑柱组件15可以为伸缩杆或者气缸。
58.上述方案的工作原理及其有益效果为:摆臂4在将芯片放置到芯片纠偏装置3上的芯片盘上时,会给芯片盘施加一个向下的压力,摆臂4在长时间的工作过程中精度发生变换时,该压力会导致芯片纠偏装置3在纠偏时,芯片盘会在该压力的作用下发生偏移导致芯片纠偏装置3纠偏错误,且该力一直处于动态变换中,为了保证芯片盘的动态平衡,当芯片盘
受力下压时并触碰到平衡盘18时(为了更好的解释原理,假设此处压力点位于平衡盘18右侧,即平衡盘18的右端向有一个向下的趋势),此时,位于右侧空气弹簧一34受力推动第二连杆37在空腔44内向远离平衡盘18的方向横向移动,此时,挡位圆弧块35移动并对其一侧的第一连杆21进行向下挤压,第一连杆21向下移动挤压气囊一22,使得气囊一22内部的气体输送至支撑气柱24的内部,支撑气柱24内部气体增多并带动活塞块一25和第一支撑杆26进行上移,使得第一支撑杆26上端与平衡盘18下端抵接,并给予芯片盘一个向上的力,该力与芯片盘的下压力会发生抵消,起到初步调整交错力的效果。
59.然后,在第一支撑杆26上移的同时带动其一侧啮合的齿轮28发生旋转,以至于齿轮28通过皮带29带动微调圆盘33发生转动,微调圆盘33旋转时带动其外表面的第二弹簧30和调节杆31在离心力的作用下转动并向外侧延伸,转动的调节杆31轻微击打平衡盘18的底部,以至于将该惯性力通过平衡盘18传递给芯片盘并辅助其调整偏转角度,以此来保证动态平衡状态(当平衡盘18下压的角度越大即力越大时,支撑气柱24中的气体流速越快,即第一支撑杆26带动齿轮28的转动速度也越快,这样就会使得微调圆盘33的转动速度加快,调节杆31所受到的离心力也越大,微击平衡盘18底部的力也越大,所以就可以根据平衡盘18下压角度的大小来使得调节杆31动态输出惯性力,以此来抵消平衡盘18的下压力,使得平衡盘18一直处于动态平衡状态)。
60.实施例3
61.在实施例1-2的基础上,还包括:
62.速度传感器,所述速度传感器设置在所述摆臂4上,用于检测所述摆臂4的摆动速度;
63.计数器,所述计数器设置在所述摆臂4上,用于检测所述摆臂4的摆动次数;
64.位移传感器,所述距离传感器设置在所述摆臂4端头处,用于检测所述摆臂4摆动距离(即摆臂4端头从起始点到摆动结束点位置变化的距离);
65.报警器,所述报警器设置在所述操作台1外侧壁;
66.控制器,所述控制器设置在所述操作台1外侧壁,所述控制器分别与所述速度传感器、计数器、位移传感器和所述报警器电性连接;
67.所述控制器基于所述速度传感器、计数器、位移传感器和所述报警器工作,包括以下步骤:
68.步骤1:基于所述速度传感器、计数器、位移传感器的检测值,通过公式(1)计算所述摆臂4的摆动状态指数:
[0069][0070]
其中,s为所述摆臂4的摆动状态指数,e为所述摆臂4的弹性模量,d为所述摆臂4的惯性矩,μ为所述摆臂4材料的泊松比,v1为所述速度传感器的最大检测值,v2为所述速度传感器的最小检测值,l1为所述摆臂4的长度,l2为所述位移传感器检测得到的摆臂4的摆动距离(即摆臂4端头从起始点到摆动结束点位置变化的距离),m为整体摆臂4的质量,g取9.8m/s2,n为所述计数器检测得到的摆臂4的摆动次数,e为自然常数,取值为2.72,k为速度传感器、计数器、位移传感器的平均精度,ω为摆臂4的损耗系数(取值为大于0小于1,可与摆臂4
的已使用时长相关、使用环境的对摆臂4的影响相关),为摆臂4的稳定系数(取值为大于0小于1,为考虑摆臂4内部结构安装的稳定性因素设置);
[0071]
步骤2:所述控制器将所摆臂4的摆动状态指数与所述摆臂4的预设摆动状态指数进行比较,当所述所摆臂4的摆动状态指数小于所述摆臂4的预设摆动状态指数(1.0-1.5)时,所述控制器控制所述报警器发出报警提示。
[0072]
上述方案的工作原理及其有益效果为:当摆臂4长时间工作的过程中,每次摆臂4在摆动拿取芯片完成一个工作周期的过程中,其摆动的精度都会随着使用时间的增加会逐渐下降,当所述所摆臂4的摆动状态指数小于所述摆臂4的预设摆动状态指数时,摆臂4将会无法将芯片移动到空载编带的顶部从而使得芯片掉落产生大量损耗,上述方案能够通过速度传感器检测所述传摆臂4的摆动速度、计数器记录所述摆臂4的摆动次数,位移传感器检测所述摆臂4摆动距离,然后通过公式1计算能够计算出所述摆臂4的摆动状态指数,控制器能够根据所述摆臂4的摆动状态指数控制报警器工作,当摆臂4的摆动状态指数小于所述摆臂4的预设摆动状态指数时,控制器控制报警器发出报警提示,使用人员根据报警及时对摆臂4进行检修,从而提高了设备的安全性,上述方案能够监测摆臂4的摆动状态指数,通过自动报警提高了自动化程度,并且及时检修摆臂4,避免了摆臂4对设备使用体验的影响,延长了设备的使用寿命,增加了设备的智能性。
[0073]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。同时在本发明的附图中,填充图案只是为了区别图层,不做其他任何限定。
[0074]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1