一种铈钛粉体快速罐装机及其罐装工艺的制作方法
1.本发明涉及罐装技术领域,具体为一种铈钛粉体快速罐装机及其罐装工艺。
背景技术:
2.现有技术中的铈钛粉体进行快速罐装工作中,通过旋转机构带动空罐逐一经过各个工位,实现灌装和封顶工作,随后通过输送带送走灌装完毕的成品,传统技术上的旋转机构带动管体移动,在旋转机构的一侧固定有半圆弧板来拦截管体,同时引导管体进行半环绕运动,长此以往的工作中,存在管体被过压夹持碎裂的隐患,为此我们提供了一种铈钛粉体快速罐装机及其罐装工艺,相较于传统技术上的半环弧板引导的方式,本发明将半环弧板去掉,通过直接夹持粉罐进行环绕移动的方式,实现粉罐的输送工作,避免粉罐的过压夹持碎裂问题,粉罐悬空环绕移动,生产不合格的粉罐可以直接下落,实现多个工序的快速检测和不合格产品处理工作的协同实现,这样产品无论在完成哪个工序后出现问题,都会及时的被处理掉,从而实现整个铈钛粉体快速灌装工作。
技术实现要素:
3.本发明的目的在于提供一种铈钛粉体快速罐装机及其罐装工艺,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:一种铈钛粉体快速罐装机,包括中盘件、储粉桶、盖帽机构、旋紧机构、外架、第一输送带和第二输送带,所述中盘件的一侧设置有储粉桶、盖帽机构和旋紧机构,所述储粉桶、盖帽机构和旋紧机构之间固定连接有外架,中盘件的一端固定连接有第一输送带,且另一端固定连接有第二输送带,所述第二输送带和中盘件接口处设置有引导架,所述中盘件包括控制筒、控制件、环形管、气控件和顶推机构,所述控制筒外部环设有若干均匀分布的控制件,控制筒的内部设置有环形管,控制件和环形管连接,环形管中部连接有气控件,环形管的上方设置有顶推机构,顶推机构固定在外架上。
5.优选的,所述顶推机构包括立板、定位弧板和电机,所述立板的上端固定在外架上,立板的下端固定连接有弧形板状的定位弧板,定位弧板上固定有若干均匀分布的电机。
6.优选的,所述气控件包括方管、齿轮、托举筒、支撑板、外筒、横杆和气管,所述环形管的中心位置设置有托举筒,托举筒的中部活动套接有外筒,外筒的顶部固定连接有齿轮,外筒的下方活动套接有气管,托举筒的外部固定连接有两个对称分布的支撑板,支撑板的一端固定连接有横杆,横杆一端外接到第一输送带上,且另一端外接到第二输送带上,齿轮和托举筒之间垫有方管,方管的一端延伸到外筒的内腔中,且方管的另一端延伸到环形管的内腔中。
7.优选的,所述控制件包括侧耳板、橡胶板、弧形盒、中板、制动柱、棱型管、副控件和l型管,所述控制筒为圆筒状且筒体的外侧壁上环设有若干均匀分布的弧面槽,控制件一端延伸到控制筒的弧面槽中,中板贯穿控制筒上开设的板孔,中板的一端固定连接有制动柱,
中板的另一端延伸到控制筒的弧面槽中,且中板端部固定连接有弧形盒,弧形盒的一侧固定连接有橡胶板,弧形盒的周围设置有两个对称分布的侧耳板,侧耳板的一端连接有副控件,副控件的一侧连接有棱型管,棱型管贯穿控制筒上开设的棱柱孔,棱型管的一侧设置有l型管,l型管一端延伸到环形管中,中板为长板状且板体两侧设置凸块。
8.优选的,所述棱型管为一端开口的棱柱壳体状,所述弧形盒中空的弧形板壳体状,弧形盒的一侧壳体上开设有若干均匀分布的通孔,且通孔贯穿橡胶板的板体,棱型管的一端延伸到弧形盒的内腔中,棱型管的一侧壳体上开设有圆孔,l型管的一端端口位于棱型管的一侧。
9.优选的,所述副控件包括斜板、弹簧件、限位板、横柱、控制座、制动板、l型定位板和内轴,所述l型定位板固定在控制筒上,l型定位板的一端开设方孔,且方孔中贯穿有制动板,制动板的一端固定连接有横柱,横柱的两侧均设置有斜板,斜板固定在l型管上,制动板的一侧固定连接有控制座,控制座和l型定位板之间垫有弹簧件,制动板的另一侧和侧耳板传动连接,侧耳板一端贯穿有内轴,内轴的两端固定连接有限位板,限位板固定在l型定位板上。
10.优选的,所述侧耳板的一端设置圆筒结构,且圆筒的一侧壁上设置有若干均匀分布的凸出齿,制动板的一侧壁上开设有若干均匀分布的齿槽,制动板和侧耳板啮合传动连接,控制座的一侧面为波浪面状,弹簧件一端顶在控制座的波浪面上,弹簧件的结构为t型盘状柱体上套有弹簧,且柱体一端贯穿l型定位板上开设的通孔。
11.一种如权利要求-任意一项所述的一种铈钛粉体快速罐装工艺,包括以下步骤:
12.步骤一:送罐,第一输送带工作将空的粉罐输送至中盘件处,冲击到张开的控制件上,被控制件夹持住;
13.步骤二:装料,控制件移动将粉罐送至储粉桶的下方,储粉桶中排出铈钛粉体,铈钛粉体下落至粉罐中,随后监控机构进行粉罐的外观检测;
14.步骤三:封顶,控制件继续移动将装完铈钛粉体的粉罐输送至盖帽机构下方,进行橡胶帽的盖压和金属帽的封顶,随后监控机构进行粉罐的第二次外观检测;
15.步骤四:加固,控制件将顶部盖帽的粉罐输送至旋紧机构下方,进行接下来的金属帽压型加固工作,随后监控机构进行粉罐的第三次外观检测;
16.步骤五:出罐,控制件环绕运动带动粉罐,粉罐受到引导架的引导从控制件上脱离,进而落到第二输送带上,随后粉罐被第二输送带输送走。
17.与现有技术相比,本发明的有益效果是:
18.1.本发明实现了粉罐逐一经过各个工位,无论在哪一个工序后,粉罐出现外观上的异常,都会及时的被接下来路径上的电机顶出,异常的粉罐脱离生产线,避免异常的粉罐继续进行下个工序而引发更大的问题,保证整个灌装工作的安全进行;
19.2.本发明通过控制件的设计,实现对粉罐的牢固夹持效果,两侧的侧耳板夹持粉罐,配合弧形盒吸附粉罐,从而保证粉罐在竖直方向上的抗压能力,这样粉罐在进行接下来的灌装和封顶工作,粉罐不会受压下落,控制件具有安全稳定的夹持能力。
附图说明
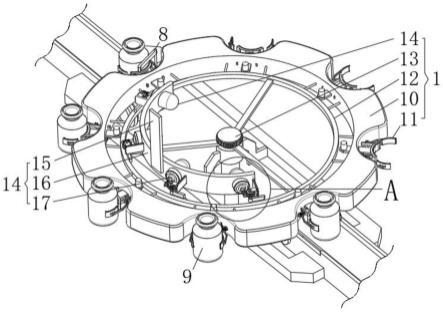
20.图1为本发明结构示意图;
21.图2为中盘件结构示意图;
22.图3为图2中a处结构示意图;
23.图4为控制筒结构示意图;
24.图5为气控件结构示意图;
25.图6为控制件结构示意图;
26.图7为引导架结构示意图;
27.图8为图6中b处结构示意图;
28.图9为环形管结构示意图;
29.图10为图9中c处结构示意图。
30.图中:中盘件1、储粉桶2、盖帽机构3、旋紧机构4、外架5、第一输送带6、第二输送带7、引导架8、粉罐9、控制筒10、控制件11、环形管12、气控件13、顶推机构14、立板15、定位弧板16、电机17、方管18、齿轮19、托举筒20、支撑板21、外筒22、横杆23、气管24、侧耳板25、橡胶板26、弧形盒27、中板28、制动柱29、棱型管30、副控件31、l型管32、斜板33、弹簧件34、限位板35、横柱36、控制座37、制动板38、l型定位板39、内轴40。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的技术方案,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.请参阅图1至图10,本发明提供一种技术方案:一种铈钛粉体快速罐装机,包括中盘件1、储粉桶2、盖帽机构3、旋紧机构4、外架5、第一输送带6和第二输送带7,中盘件1的一侧设置有储粉桶2、盖帽机构3和旋紧机构4,储粉桶2、盖帽机构3和旋紧机构4之间固定连接有外架5,中盘件1的一端固定连接有第一输送带6,且另一端固定连接有第二输送带7,第二输送带7和中盘件1接口处设置有引导架8,中盘件1包括控制筒10、控制件11、环形管12、气控件13和顶推机构14,控制筒10外部环设有若干均匀分布的控制件11,控制筒10的内部设置有环形管12,控制件11和环形管12连接,环形管12中部连接有气控件13,环形管12的上方设置有顶推机构14,顶推机构14固定在外架5上。
33.顶推机构14包括立板15、定位弧板16和电机17,立板15的上端固定在外架5上,立板15的下端固定连接有弧形板状的定位弧板16,定位弧板16上固定有若干均匀分布的电机17,参考图1、图2和图3理解电机17的位置和结构,电机17为现有技术中的旋转推动机构,在中盘件1上方设置现有技术中的监控机构,监控机构通过导线和电机17连接,监控机构检测到粉罐9在加工过程中出现异常,就会控制粉罐9输送路线上接下来遇到的电机17工作,从而将粉罐9从控制件11上顶出,粉罐9失去控制而下落,可以在中盘件1下方设置现有技术中的回收机构,这样及时处理,不合格的产品第一时间脱离生产线,避免进一步的问题发生。
34.气控件13包括方管18、齿轮19、托举筒20、支撑板21、外筒22、横杆23和气管24,环形管12的中心位置设置有托举筒20,托举筒20的中部活动套接有外筒22,外筒22的顶部固定连接有齿轮19,外筒22的下方活动套接有气管24,托举筒20的外部固定连接有两个对称分布的支撑板21,支撑板21的一端固定连接有横杆23,横杆23一端外接到第一输送带6上,
且另一端外接到第二输送带7上,齿轮19和托举筒20之间垫有方管18,方管18的一端延伸到外筒22的内腔中,且方管18的另一端延伸到环形管12的内腔中,参考图5理解,气管24的底端外接到现有技术中的排气机构中,将外界的旋转驱动机构接触端设置在齿轮19的一侧,旋转驱动机构为现有技术装置,用来驱动齿轮19,控制齿轮19的转动,齿轮19带动外筒22,外筒22带动若干环设的方管18,进而控制环形管12转动,环形管12带动控制筒10和控制件11,控制筒10、控制件11和环形管12同步转动。
35.控制件11包括侧耳板25、橡胶板26、弧形盒27、中板28、制动柱29、棱型管30、副控件31和l型管32,控制筒10为圆筒状且筒体的外侧壁上环设有若干均匀分布的弧面槽,控制件11一端延伸到控制筒10的弧面槽中,中板28贯穿控制筒10上开设的板孔,中板28的一端固定连接有制动柱29,中板28的另一端延伸到控制筒10的弧面槽中,且中板28端部固定连接有弧形盒27,弧形盒27的一侧固定连接有橡胶板26,弧形盒27的周围设置有两个对称分布的侧耳板25,侧耳板25的一端连接有副控件31,副控件31的一侧连接有棱型管30,棱型管30贯穿控制筒10上开设的棱柱孔,棱型管30的一侧设置有l型管32,l型管32一端延伸到环形管12中,中板28为长板状且板体两侧设置凸块。
36.棱型管30为一端开口的棱柱壳体状,弧形盒27中空的弧形板壳体状,弧形盒27的一侧壳体上开设有若干均匀分布的通孔,且通孔贯穿橡胶板26的板体,棱型管30的一端延伸到弧形盒27的内腔中,棱型管30的一侧壳体上开设有圆孔,l型管32的一端端口位于棱型管30的一侧,参考图6和图8理解,棱型管30可以左右移动,移动过程中棱型管30壳体上的圆孔对应l型管32的一端端口,实现l型管32和棱型管30的连通。
37.副控件31包括斜板33、弹簧件34、限位板35、横柱36、控制座37、制动板38、l型定位板39和内轴40,l型定位板39固定在控制筒10上,l型定位板39的一端开设方孔,且方孔中贯穿有制动板38,制动板38的一端固定连接有横柱36,横柱36的两侧均设置有斜板33,斜板33固定在l型管32上,制动板38的一侧固定连接有控制座37,控制座37和l型定位板39之间垫有弹簧件34,制动板38的另一侧和侧耳板25传动连接,侧耳板25一端贯穿有内轴40,内轴40的两端固定连接有限位板35,限位板35固定在l型定位板39上。
38.侧耳板25的一端设置圆筒结构,且圆筒的一侧壁上设置有若干均匀分布的凸出齿,制动板38的一侧壁上开设有若干均匀分布的齿槽,制动板38和侧耳板25啮合传动连接,控制座37的一侧面为波浪面状,弹簧件34一端顶在控制座37的波浪面上,弹簧件34的结构为t型盘状柱体上套有弹簧,且柱体一端贯穿l型定位板39上开设的通孔,参考图8理解各个零件的位置关系,控制座37的波浪面上有两个凹槽,制动板38移动过程中,弹簧件34的一端在两个凹槽之间游走,弹簧件34对控制座37施加弹性压力,控制座37控制制动板38,制动板38带动侧耳板25,这样侧耳板25在两个角度之间摆动。
39.一种如权利要求1-7任意一项的一种铈钛粉体快速罐装工艺,包括以下步骤:
40.步骤一:送罐,第一输送带6工作将空的粉罐9输送至中盘件1处,冲击到张开的控制件11上,被控制件11夹持住;
41.步骤二:装料,控制件11移动将粉罐9送至储粉桶2的下方,储粉桶2中排出铈钛粉体,铈钛粉体下落至粉罐9中,随后监控机构进行粉罐9的外观检测;
42.步骤三:封顶,控制件11继续移动将装完铈钛粉体的粉罐9输送至盖帽机构3下方,进行橡胶帽的盖压和金属帽的封顶,随后监控机构进行粉罐9的第二次外观检测;
43.步骤四:加固,控制件11将顶部盖帽的粉罐9输送至旋紧机构4下方,进行接下来的金属帽压型加固工作,随后监控机构进行粉罐9的第三次外观检测;
44.步骤五:出罐,控制件11环绕运动带动粉罐9,粉罐9受到引导架8的引导从控制件11上脱离,进而落到第二输送带7上,随后粉罐9被第二输送带7输送走。
45.第一输送带6将粉罐9送至中盘件1处,粉罐9移动冲击到控制件11上,进而粉罐9顶在橡胶板26上,同时弧形盒27顶进控制筒10外侧壁上的弧面槽深处,弧形盒27带动中板28和棱型管30移动,中板28上的凸块控制筒10卡住,中板28不再移动,此时棱型管30和l型管32的一端连通,气管24中持续外排气体,这样l型管32中的气体被吸进环形管12中,随后气体通过方管18排到外筒22中,进而通过气管24排走,齿轮19、方管18和外筒22固定成可旋转的整体,这样整体转动的同时不影响抽气工作的持续进行,此外棱型管30移动带动斜板33,斜板33移动拨动横柱36,横柱36移动远离棱型管30,横柱36带动制动板38,制动板38移动带动侧耳板25转动,这样两侧对称的侧耳板25靠近将粉罐9夹持住,弹簧件34顶在控制座37上的槽处,控制座37控制制动板38,这样两侧的侧耳板25配合弹性夹持粉罐9,粉罐9外壁和橡胶板26贴合,弧形盒27中的气体通过棱型管30外排,弧形盒27的内腔处于负压状态,这样粉罐9被牢固的吸附在弧形盒27一侧,保证控制件11顺利将粉罐9输送走,如果粉罐9外观出现异常,监控机构工作,就会引起粉罐9接下来路径上的电机17工作,电机17上的板件转动进而将制动柱29顶出,制动柱29控制中板28逆向移动,这样棱型管30壳体上的圆孔和l型管32的端口错位开来,打破弧形盒27中的负压状态,此外夹持粉罐9的两个侧耳板25分开,粉罐9失去控制件11的控制后下落,被中盘件1下方设置的现有技术中的收集机构回收。
46.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1