医疗用环保收集机器人
1.本发明属于智能医疗器械,具体涉及一种医疗用环保收集机器人,用于医用垃圾的处理及回收。
背景技术:
2.医院的医用垃圾,尤其是接触过患者的血液、分泌物的垃圾,是不可忽视的传染源,若处理不好,不但易引起医院交叉感染,流向社会,后果难以想象。而且在疫情防控已经常态化的今天,口罩等新型防护垃圾造成的污染愈发严重。流入到海洋的一次性口罩需要450年才能降解,考虑到这一新型污染对环境造成的持久破坏和影响,它们其实就是一颗颗“生态炸弹”,对生态有着致命的污染。但现在处理垃圾的方式却差强人意,处理过程繁琐,人力资源利用的也与得到的不成正比,且垃圾极易泄露,威胁人类更不利生态。
3.为了减轻这种新型污染,把医院的固体垃圾和液体垃圾进行分类,减少垃圾袋的使用,我们设计了这款基于物联网技术和agv模块的医疗用环保收集机器人,使医护人员免受伤害,同时较好地解决医疗垃圾的处理问题。
技术实现要素:
4.本发明的目的在于提供一种医疗用环保收集机器人,最大化避免人体与感染性垃圾的接触;自动进行垃圾的粉碎、消毒,分类,减少人员感染风险;将酒精水箱放置在箱体外,便于添料和调节,不会导致管道内酒精的残留;并可感应垃圾装填情况,垃圾装满时会出现相应提示;使用航模电池进行收集系统的供电,基于agv智能机器人驱动的医疗用环保收集系统。
5.一种医疗用环保收集系统,包括存储主体,所述存储主体顶部安装有长方形的顶盖,存储主体上安装有消毒机构,存储主体内腔从上至下依次设置破碎机构、履带及垃圾分类机构,所述存储主体安装于行走机构上。
6.所述消毒机构包括箱体和紫外线消毒灯,所述箱体安装于存储主体的外侧壁上,且出液口与喷洒管道一端连接,喷洒管道上安装有电磁阀,喷洒管道另一端延伸至存储主体内部,且位于存储主体内部安装有喷嘴,所述箱体内放置有水泵,水泵的出水端与出液口连接,所述紫外线消毒灯和喷嘴安装于顶盖的内表面上。
7.所述破碎机构包括三个破碎辊,所述破碎辊两端通过轴承座安装于存储主体内腔的立板上,每一个破碎辊的端部分别通过联轴器与对应的步进电机输出轴连接,步进电机通过螺栓固定安装于支撑板上。
8.所述垃圾分类机构用于固体垃圾和液体垃圾的分类,所述垃圾分类机构包括斜坡导块、基板,所述基板与存储主体一体成型,基板上方存储主体内安装有第一斜坡,第一斜坡与安装于储存箱体上的履带的出口对应设置,基板上表面靠近存储主体内壁一侧安装有第一直线电机,第一直线电机的输出轴与第一推板连接,与基板正对的存储主体内侧壁上安装有第二斜坡,基板的下表面同时安装有两个第二直线电机,第二直线电机的输出轴末
端同时与压板连接,固体垃圾存储箱的底板上远离压板一端安装有电机座,在固体垃圾存储箱底板和电机座上分别安装有第三直线电机,两个第三直线电机的输出轴同时与第二推板连接,固体垃圾存储箱的底板与压板正对部分开设有呈矩阵式分布的通孔,所述固体垃圾存储箱底板下方与存储主体底板之间为液体垃圾存储箱,存储主体底部侧壁安装有与液体垃圾存储箱连通的出水口,液体垃圾存储箱内的液体垃圾通过出水口排出。
9.与现有技术相比,本发明的有益效果是:
10.1.使用红外线传感器检测是否有用户要扔垃圾,随着垃圾的投入,所述紫外线消毒灯对垃圾进行一次消毒,降低有害细菌的存活概率,同时所述酒精消毒装置对垃圾进行第二次消毒。
11.2.包括三个破碎机的垃圾破碎机构会快速搅碎垃圾,省时省力,同时减少因垃圾形状不规则而占据较多的空间,可以存储更多垃圾。
12.3.在垃圾分类机构内,固体垃圾会被舵机控制的推杆推进固体垃圾桶中,压缩机会将固体垃圾压缩,使液体垃圾顺利流下。固液分离避免固体垃圾划破垃圾袋,垃圾泄露造成危害。
13.4.所述垃圾贮存机构包括固体垃圾抽屉和液体垃圾抽屉。进一步的,所述液体垃圾抽屉是密封装置,有相应出水口,可以把液体垃圾排出。固体垃圾进入固体垃圾抽屉,由垃圾袋进行收集。收集后的垃圾碎屑进入固体垃圾贮存区,可运到垃圾焚烧厂进行焚烧发电。
附图说明
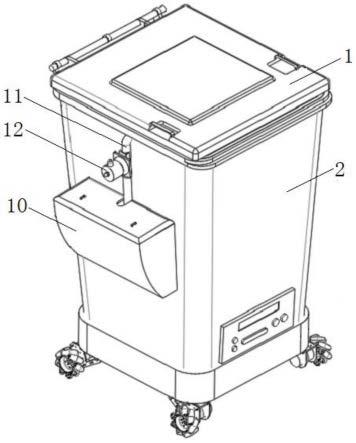
14.图1是本发明医疗用环保收集系统的整体结构三维图;
15.图2是本发明医疗用环保收集系统行走机构俯视图;
16.图3是本发明医疗用环保收集系统剖视图;
17.图4是本发明医疗用环保收集系统的履带示意图;
18.图5是本发明医疗用环保收集系统破碎机构示意图;
19.图6是本发明医疗用环保收集系统示意图;
20.1-顶盖,2-存储主体,3-履带,4-消毒机构,5-破碎机构,6-垃圾分类机构,7-行走机构,9-紫外线消毒灯,10-箱体,11-喷洒管道,12-电磁阀,13-喷嘴,14-破碎辊,15-立板,16-支撑板,17-第一斜坡导块,18-基板,19-第一直线电机,20-第一推板,21-第二斜坡导块,22-第二直线电机,23-压板,24-电机座,25-第三直线电机,26-第二推板,27-通孔,28-出水口,29-固体垃圾存储箱,30-液体垃圾存储箱,31-步进电机。
具体实施方式
21.下面结合附图和实施例对本发明作进一步的详细说明。
22.如图1至图6所示,一种医疗用环保收集机器人,包括存储主体2,所述存储主体2顶部安装有长方形的顶盖1,存储主体2上安装有消毒机构4,存储主体2内腔从上至下依次设置破碎机构5、履带3及垃圾分类机构6,所述存储主体2安装于行走机构7上。履带3可以运送混合之后成糊状的固体垃圾和液体垃圾混合物,方便快捷,效率很高;所述行走机构7采用agv智能机器人,agv智能机器人通过其上的四个直流电机驱动,带动对应的四个麦克纳姆
轮转动,使医疗用环保收集系统行进。
23.所述消毒机构4包括箱体10和紫外线消毒灯9,所述箱体10安装于存储主体2的外侧壁上,且出液口与喷洒管道11一端连接,喷洒管道11上安装有电磁阀12,喷洒管道11另一端延伸至存储主体2内部,且位于存储主体2内部安装有喷嘴13,所述箱体10内放置有水泵,水泵的出水端与出液口连接,所述紫外线消毒灯9安装于顶盖1的内表面中部,所述喷嘴13以紫外线消毒灯9为对称中心对称设置,通过紫外线消毒灯9对垃圾进行一次消毒,通过喷洒消毒液对垃圾进行二次消毒,本实施例中消毒液为酒精。
24.所述破碎机构5包括三个破碎辊14,所述破碎辊14两端通过轴承座安装于存储主体2内腔的立板15上,每一个破碎辊14的端部分别通过联轴器与对应的步进电机31输出轴连接,步进电机31通过螺栓固定安装于支撑板16上,支撑板16上设置有供垃圾顺利通过的长条孔;可以快速搅碎垃圾,省时省力,同时减少因垃圾形状不规则而占据较多的空间,可以存储更多垃圾。
25.所述垃圾分类机构6用于固体垃圾和液体垃圾的分类,所述垃圾分类机构6包括第一斜坡导块17、基板18,所述基板18与存储主体2一体成型,基板18上方存储主体2内安装有第一斜坡导块17,第一斜坡导块17与安装于存储主体2上的履带3的出口对应设置,基板18上表面靠近存储主体2内壁一侧安装有第一直线电机19,第一直线电机19的输出轴与第一推板20连接,通过第一直线电机19控制第一推板20将落在基板18上的垃圾推到固体垃圾存储箱29内,与基板18正对的存储主体2内侧壁上安装有第二斜坡导块21,基板18的下表面同时安装有两个第二直线电机22,第二直线电机22的输出轴末端同时与压板23连接,通过第二直线电机22带动压板23下移挤压垃圾,将垃圾中的液体挤出,通过固定垃圾存储箱上的通孔27流出进入液体垃圾存储箱30内,固体垃圾存储箱29的底板上远离压板23一端安装有电机座24,在固体垃圾存储箱29底板和电机座24上分别安装有第三直线电机25,两个第三直线电机25的输出轴同时与第二推板26连接,通过第三直线电机25带动第二推板26将固体垃圾存储箱29内的垃圾推向压板23一侧,当固体垃圾存储箱29内的垃圾装满后,通过固定垃圾存储箱外侧的拉手将固体垃圾存储箱29从存储主体2中抽出,进而将存储主体2中的垃圾取出,所述固体垃圾存储箱29底板下方与存储主体2底板之间为液体垃圾存储箱30,存储主体2底部侧壁安装有与液体垃圾存储箱30连通的出水口29,液体垃圾存储箱30内的液体垃圾通过出水口29排出。
26.所述控制系统包括单片机、警示灯、红外线传感器及摄像头,所述单片机和警示灯均安装于存储主体2的外表面上,摄像头安装于基板18的基板18下表面处,摄像头的输出端与单片机输入端连接,单片机的输出端与警示灯连接,所述红外线传感器安装于顶盖1下表面处,用于检测是否有垃圾投放进存储主体2内,当红外线传感器检测到信号传递给单片机,单片机控制水泵、电磁阀12、紫外线消毒灯9、步进电机31、履带3的电机、第一直线电机19、第二直线电机22和第三直线电机25工作,对垃圾进行处理并分类;控制系统与agv智能机器人共用一个单片机;单片机通过机智云物联网云平台与手机连接,通过sim卡进行通信,单片机发送数据到物联网通讯模块,物联网通讯模块型号为esp8266,并且数据通过机智云平台传送到手机进行显示,当摄像头将固体垃圾存储箱29内的垃圾存放情况实时反馈给单片机,当检测到存满时,单片机控制警示灯亮起,同时反馈到手机上,工作人员将固体垃圾存储箱29抽出清空处理。
27.一种医疗用环保收集机器人的使用过程为:
28.当垃圾被投入收集机器人后,使用红外线传感器检测是否有用户要扔垃圾,当检测到垃圾投入后将信号反馈给单片机,单片机控制agv智能机器人的直流电机停止工作,医疗用环保收集系统停止行进,而后单片机控制水泵、电磁阀12、紫外线消毒灯9、步进电机31、履带3的电机、第一直线电机19、第二直线电机22及第三直线电机25工作,当单片机识别到第一直线电机19工作后,控制agv智能机器人继续行进,通过紫外线消毒灯9对垃圾进行一次消毒,降低有害细菌的存活概率,同时消毒机构4中的水泵工作将消毒液传输至喷洒管道11,经过喷嘴13喷出,对垃圾进行第二次消毒;步进电机工作带动破碎辊14工作,快速搅碎垃圾,省时省力,同时减少因垃圾形状不规则而占据较多的空间,可以存储更多垃圾,被破碎后的垃圾会通过履带3运送至基板18上,通过第一直线电机19带动第一推杆将垃圾推至固体垃圾存储箱29内,第三直线电机25将垃圾推向压板23一端,第二直线电机22控制压板23挤压压缩固体垃圾,使固体垃圾中的液体经过基板18上的通孔27流入液体垃圾存储箱30内,液体垃圾存储箱30内的液体垃圾可经过出水口29排出;当摄像头检测到固体垃圾存储箱29内的固体垃圾存满后,反馈信号给单片机,单片机控制警示灯亮起同时传输到手机,并控制agv智能机器人停止行进,此时操作人员通过拉手将固定垃圾存储箱从存储主体2中抽出,进而清理固体垃圾存储箱29内的垃圾后放回存储主体2即可,收集的固体垃圾可运到垃圾焚烧厂进行焚烧发电。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1