全向砖块搬运机及其使用方法
1.本发明涉及输送工具,具体而言,涉及全向砖块搬运机及其使用方法。
背景技术:
2.现有的砖块运输装置具有以下缺点:无法全自动的运送砖块,在起点到终点之间还需要大量人力劳作。现有的砖块运输装置局限于平地运输,和普通传送带相近,难以向高空运送砖块。现有的装置功能不够集成化,一道运输工作可能需要人力和多台机械设备的合作,对场地的空间占用较大。现有的机械设备在运输时需要拆开,到达现场后在进行组装,需要消耗大量额外的施工时间。有些设备对场地要求高,无法适应现场恶劣的环境,对设备的寿命有严重影响。
技术实现要素:
3.针对上述问题,本发明实施例提供一种全向砖块搬运机全向砖块搬运机及其使用方法以至少解决工地施工现场砖块搬运不够集成化,人力占比较大的问题。
4.本发明实施例提供了一种全向砖块搬运机,包括:顶升平台,用于驱动工作台升降;转向机构,设于所述顶升平台,用于驱动所述工作台在水平面转动;工作台,设于所述顶升平台,能够伸缩以移动至设定位置;传送机构,设于所述工作台,所述传送机构的传送起点位于所述顶升平台上方用于接收砖块,所述传送机构的传送终点随所述工作台移动至设定位置以传送砖块。
5.进一步的,所述顶升平台包括:底座;液压缸,设于所述底座内的液压缸,所述液压缸的活塞与工作台接触以推动所述工作台升降。
6.进一步的,所述转向机构包括:电动机;行星轮减速机,与所述电动机连接以传输动力;齿轮对,与所述行星轮减速机啮合并用于带动所述工作台转动。
7.进一步的,所述行星轮减速机包括:第一主动轮,与电动机连接,多个第一行星轮,与第一行星轮组成齿轮副;第一定齿轮,套设于第一行星轮外侧,第一定齿轮内侧的齿轮与第一行星轮啮合;一级行星轮支架,与所述第一行星轮连接,所述第一行星轮公转带动所述第一行星轮支架转动完成一级减速;第二主动轮,与一级行星轮支架连接,多个第二行星轮,与第二行星轮组成齿轮副;
第二定齿轮,套设于第二行星轮外侧,第二定齿轮内侧的齿轮与第二行星轮啮合;二级行星轮支架,与所述第二行星轮连接,所述第二行星轮公转带动所述第二行星轮支架转动完成二级减速,所述二级行星轮支架底部设有传动轴,所述传动轴与齿轮对啮合。
8.进一步的,所述工作台包括:支撑座,所述支撑座受所述顶升平台驱动升降并受转向机构驱动转动;一级伸缩臂,连接于所述支撑座;二级伸缩臂,可伸缩地设于一级伸缩臂内;三级伸缩臂,可伸缩地设于二级伸缩臂内;第一液压缸,其缸体设于三级伸缩臂内且其驱动杆与二级伸缩臂连接;第二液压缸,其缸体设于二级伸缩臂内且其驱动杆与一级伸缩臂连接。
9.进一步的,所述一级伸缩臂一端可转动地连接于所述支撑座;所述工作台还包括俯仰液压缸,所述俯仰液压缸的缸体可转动地设于支撑座内,所述俯仰液压缸的活塞可转动地连接一级伸缩臂,俯仰液压缸能够驱动一级伸缩臂转动以调整其仰角。
10.进一步的,所述传送机构包括:可伸缩传送带,设于所述工作台,能够随所述工作台伸缩以传送砖块;张紧力控制系统,用于控制所述可伸缩传送带的张紧力。
11.进一步的,所述可伸缩传送带包括:主动轮,设于所述三级伸缩臂,所述主动轮连接电机以输出动力;从动轮,连接所述张紧力控制系统,以在所述张紧力控制系统驱动下移动;位置保持轮,设于所述一级伸缩臂;传送带,分别绕过所述主动轮、从动轮及位置保持轮。
12.进一步的,所述张紧力控制系统包括:电机,设于所述一级伸缩臂;丝杠,通过联轴器连接电机;拉力传感器;安装在联轴器上。用于检测拉力;控制座,安装于所述丝杆,以受所述丝杠驱动移动,所述控制座连接所述从动轮以带动所述从动轮移动。
13.本发明实施例还提供一种全向砖块搬运机的使用方法,包括:通过顶升平台驱动工作台移动至需要的下料高度;转向机构的电动机通过行星轮减速机驱动工作台转动至需要的下料角度;俯仰液压缸驱动一级伸缩臂转动至需要的仰角;第一液压缸及第二液压缸分别驱动三级伸缩臂及二级伸缩臂伸缩至下料位置,张紧力控制系统的电机转动以调节从动轮的位置,使拉力传感器检测的数值保持在设定范围内;转动主动轮,使传送带传送砖块。
14.有益效果:与现有技术相比,本发明集运输、输送、抬升砖块于一体。顶升平台太高总体可运输高度,行星轮减速机将工作台旋转,向周围360
°
范围运送砖块。伸缩臂与伸缩传送带配合实现运送距离可以变化,张紧力控制,随时控制带的张紧力。
15.本机高度集成化,将砖块搬运中的多个环节只作为一体,节约施工现场的场地。
16.通过行星轮减速机和齿轮对带动工作台360
°
旋转,可以向半径范围内的任意一点运送砖块,不需要调整机器的位置即可完成运输,节省挪动机器位置的时间。
17.有顶升平台和俯仰角液压缸控制,机器可以对极高的高度运送砖块,施工现场可以不在需要货运电梯运送砖块。
18.有伸缩臂和伸缩带,机器的运送距离可以调整变化,不需要频繁调整机器的位置,提高搬运效率。
19.整机可以在任意载重平台上安装,通用性高。
20.本机安装在载重平台上后可由该车辆运送至任意位置,不需要现场拆装,节省时间。
21.伸缩臂可以伸长缩短,在不用时可以缩至最短,节省空间。
22.有张紧力自动控制系统,不用手动校准张紧力,减少维护时间。
23.该机器能在任意场地工作,对场地的要求较低。
附图说明
24.此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
25.在附图中:图1是本发明的实施例的全向砖块搬运机的立体示意图。
26.图2是图1所示全向砖块搬运机的部分元件的分解示意图,以示出顶升平台的结构。
27.图3是图1所示全向砖块搬运机的转向机构处的立体示意图。
28.图4是图3所示转向机构的分解示意图。
29.图5是图1所示全向砖块搬运机的工作台的二级伸缩臂及第一液压缸的立体示意图。
30.图6是图1所示全向砖块搬运机的工作台的一级伸缩臂及第二液压缸的立体示意图。
31.图7是图1所示全向砖块搬运机的工作台的一级伸缩臂及俯仰液压缸的立体示意图。
32.图8是图1所示全向砖块搬运机的工作台的支撑座及俯仰液压缸的立体示意图。
33.图9是图1所示全向砖块搬运机的工作台的可伸缩传送带部分元件的部分分解示意图。
34.图10是图1所示全向砖块搬运机的工作台的可伸缩传送带部分元件的分解示意图。
35.图中标号所代表元件:10、顶升平台;11、底座;12、液压缸;20、转向机构;21、电动机;211、平键;22、行星轮减速机;221、上箱盖;222、安装座;224、第一行星轮;2241、一级行星轮支架;225、第一定齿轮;226、第二主动轮;227、第二行星轮;2271、二级行星轮支架;228、第二定齿轮;23、齿轮对;24、平面轴承;30、工作台;31、支撑座;32、俯仰液压缸;33、一级伸缩臂;34、二级伸缩臂;35、三级伸缩臂;36、第一液压缸;37;第二液压缸;40、传送机构;
41、可伸缩传送带;411、主动轮支架;412、主动轮;413、电机;414、上箱体;4140、上料口;4141、导轨;4142、滑块;415、从动轮;416、传送带;417、位置保持轮;42、张紧力控制系统;421、底座;422、丝杠;423、控制座;425、联轴器;426、电机。
具体实施方式
36.下文中将参考附图并结合实施例来详细说明本发明。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
37.需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。
38.请参见图1,本发明实施例的全向砖块搬运机包括顶升平台10、转向机构20、工作台30及传送机构40。
39.所述顶升平台10用于将工作台30顶升至需要的高度。转向机构20用于转动工作台30至设定的方向。所述工作台30用于伸缩移动至下料区。所述传送机构40用于输送砖块200。
40.请参见图1及图2,所述顶升平台10包括底座11及液压缸12。所述液压缸12设于所述底座11内。液压缸12的活塞与工作台30接触。所述液压缸12顶升后推动所述工作台30上升。所述液压缸12下降后,所述工作台30受重力作用随所述液压缸12下降。
41.在图示实施例中,底座内设有三个液压缸12以共同顶升所述工作台30。
42.所述液压缸12与所述工作台30仅为接触状态,未固定连接,使工作台30能够独自转动。
43.工作台30部分深入底座11中,底座11对工作台30进行限位,以防止其在水平方向移动。
44.请参见图2、图3及图4,所述转向机构20包括电动机21、行星轮减速机22及齿轮对23。
45.所述电动机21用于输出动力。所述行星轮减速机22用于将电动机21的动力输至齿轮对23上,并由齿轮对23对带动工作台30转动。
46.所述行星轮减速机22包括上箱盖221、安装座222、第一主动轮(图未示)、第一行星轮224、一级行星轮支架2241、第一定齿轮225、第二主动轮226、第二行星轮227、二级行星轮支架2271及第二定齿轮228。
47.上箱盖221与安装座222固定并与底座11固定连接,上箱盖221与安装座222收容转向机构20的其他元件。
48.所述电动机21通过平键211与第一主动轮连接。所述第一主动轮与第一行星轮224组成齿轮副。第一定齿轮225为环装,第一定齿轮225与上箱盖221固定连接并套设于第一主动轮与第一行星轮224外侧。第一定齿轮225内侧的齿轮与第一行星轮224啮合,完成轴向固定。
49.第一行星轮224可转动地设于一级行星轮支架2241。第一行星轮224公转带动一级行星轮支架2241转动完成一级减速。
50.第二主动轮226固定于第一行星轮支架2241的轴心。所述第二主动轮226与第二行星轮227组成齿轮副。第二定齿轮228为环装,第二定齿轮228与上箱盖221固定连接并套设
于第二主动轮226与第二行星轮227外侧。第二定齿轮228内侧的齿轮与第二行星轮227啮合,完成轴向固定。
51.第二行星轮227可转动地设于二级行星轮支架2271。第二行星轮227公转带动第二行星轮支架2271转动完成二级减速。
52.二级行星轮2271支架底部设有传动轴,传动轴穿过安装座222与齿轮对23啮合并通过齿轮对23驱动工作台30转动。
53.在图示实施例中,所述转向机构20还包括平面轴承24。平面轴承24设于所述底座11及工作台30之间以减小摩擦力。
54.请参见图1及图5至图8,所述工作台30包括支撑座31、俯仰液压缸32、一级伸缩臂33、二级伸缩臂34、三级伸缩臂35和第一液压缸36及第二液压缸37。
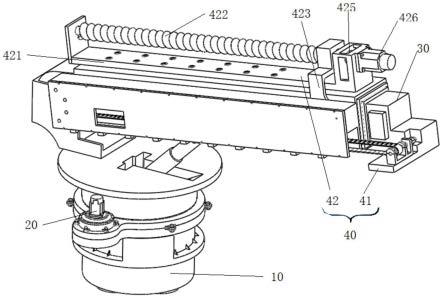
55.所述支撑座31可动地设于所述底座11。所述支撑座31受所述顶升平台10驱动升降并受转向机构20驱动转动。
56.一级伸缩臂33一端可转动地安装于支撑座31。二级伸缩臂34可伸缩地设于一级伸缩臂33内。三级伸缩臂35可伸缩地设于二级伸缩臂34内。第一液压缸36缸体设于三级伸缩臂35内且其驱动杆与二级伸缩臂34连接。第二液压缸37缸体设于二级伸缩臂34内且其驱动杆与一级伸缩臂33连接。第一液压缸36驱动三级伸缩臂35伸缩。第二液压缸37驱动二级伸缩臂34伸缩。
57.俯仰液压缸32的缸体可转动地设于支撑座内。俯仰液压缸32的活塞可转动地连接一级伸缩臂33。俯仰液压缸32能够驱动一级伸缩臂33转动以调整仰角。
58.所述传送机构40包括可伸缩传送带41及张紧力控制系统42。
59.可伸缩传送带41设于所述工作台30,能够随所述工作台30伸缩以传送砖块。张紧力控制系统42,用于控制所述可伸缩传送带41的张紧力。
60.请参见图1、图9及图10,所述可伸缩传送带41包括主动轮支架411、主动轮412、电机413、上箱体414、从动轮415、传送带416、位置保持轮417。
61.主动轮支架411固定于三级伸缩臂35。主动轮412通过销安装在主动轮支架411上。电机413连接主动轮412以驱动其转动。
62.上箱体414固定于一级伸缩臂33。上箱体414设有上料口4140以供上料。上箱体414内设有导轨4141。导轨4141上设有可滑动地滑块4142。从动轮415通过轴安装在滑块4142上。
63.传送带416安装在主动轮412和从动轮415上。传送带416大致呈匸型。
64.上箱体414内还设有多个位置保持轮417。传送带416分别绕过多个位置保持轮417,以使传送带416能够保持位置。在主动轮412、从动轮415及位置保持轮417共同作用下,传送带416大致呈匸型。
65.从动轮415、位置保持轮417的轴为阶梯轴,在两端安装轴承后,安装进上箱体414中。
66.所述张紧力控制系统42包括底座421、丝杠422、控制座423、拉力传感器(图未示)、联轴器425、电机426。电机426通过螺栓连接在底座421上,丝杠422安装在底座421上,电机426通过联轴器425和丝杠422连接,拉力传感器安装在联轴器425上,控制座423通过中间的螺旋安装在丝杠422上,底座421通过螺栓连接在一级伸缩臂上33。
67.控制座423连接从动轮415所在的滑块4142以带动其移动,并通过拉力传感器感应的拉力,使传送带416保持一定的张紧程度。
68.本发明实施例还提供一种全向砖块搬运机的使用方法包括:通过顶升平台驱动工作台移动至需要的下料高度;转向机构的电动机通过行星轮减速机驱动工作台转动至需要的下料角度;俯仰液压缸驱动一级伸缩臂转动至需要的仰角;第一液压缸及第二液压缸分别驱动三级伸缩臂及二级伸缩臂伸缩至下料位置,张紧力控制系统的电机转动以调节从动轮的位置,使拉力传感器检测的数值保持在设定范围内;转动主动轮,使传送带传送砖块。
69.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1