一种异步挂篮带锚定系统回转吊机施工方法与流程
1.本发明涉及桥梁施工技术领域,具体为一种异步挂篮带锚定系统回转吊机施工方法。
背景技术:
2.异步挂篮施工方法是近年来在桥梁建设中常使用,异步挂篮由上部承重桁架、行走系统、内 (外)模滑梁、底模框架等组成。其利用波形钢腹板自承重的特点,以钢腹板翼缘板作为行走轨道,进行逐节施工。比起传统的菱形桁架挂篮,具有构造简单的优点,而且可将传统菱形桁架挂篮n号单个节段的施工面拓展到n-1、n、n+1三个节段施工面,施工效率大大提高。
3.除了传统施工中采用塔吊进行起重吊运方法以外,在挂篮上安装起重吊运设备,可以将施工所需要的波腹板、工具等物资从地面运送到挂篮上,可大大简化施工的运输工作。但是由于挂篮上位置有限,现有的挂篮起吊运输装置大部分在挂篮上设置滑轨,滑轨上安装可移动的起吊机构为主。例如专利1:自带运输和吊装系统的菱形挂篮;cn201621392546.7;专利2:一种波形钢腹板pc组合箱梁桥挂篮用起吊装置;cn202020870949.8;专利3:一种兼具加劲钢桁连续刚构下节点吊装功能的菱形挂篮;cn202120006967.6;此类起吊机构虽然能起吊部分重物,但是起吊后的重物难以到达桥面任意位置,且卸料难度大,使用及其不便。经过设计,更为先进的方案是将回转吊机与异步挂篮进行结合,例如专利4:一种带全回转吊机的组合式挂篮及其施工方法;cn201711332485.4;以及申请人之前申请的专利5:双限位限重桥梁悬臂施工用复合式智能吊机;cn202110145250.4;均采用全回转吊机与异步挂篮结合的方式进行施工。全回转吊机安装在挂篮上方,跟随挂篮移动,解决了大跨径桥梁塔吊作业半径无法到达桥梁跨中的桥梁施工的难题。
4.回转吊机在使用时,是按照待起吊货物的重量,选择性在吊臂的另一端进行配重,例如轻载状态,可以不配重,如起吊货物超过额定重量,则在吊臂上挂载相应的配重块。此种方式施工方式费时费力;而且吊臂受到的弯曲应力较大,起吊载荷受到限制,但是塔架由于自重和体积的限制,无法通过增加结构材料增强结构强度,由此回转吊机无法发挥最大起吊效果。另一方面,在重载状态下,如果吊机的回转塔架配重不足,塔架承受很大的倾倒力矩,由于倾倒力矩完全由吊机的回转底盘结构承受,回转底盘容易发生损坏。
技术实现要素:
5.本发明的目的是提供一种异步挂篮带锚定系统回转吊机,增加了后锚系统,栓锚于桥身混凝土上,在重载工况时,给吊机提供抗倾倒力矩,可大大提高异步挂篮吊机的起重吊装能力。
6.为达到上述目的,本发明的技术方案如下:一种异步挂篮带锚定系统回转吊机施工方法,包括如下施工步骤:
(1)回转吊机启动电源,自检结束后,由操作员进行手动选择吊机工况;(2)当操作员选择轻载工况状态下,吊机程序允许进行全回转施工作业;(3)待起吊货物挂上吊钩,吊钩的重力传感器对起吊货物进行称重,当货物重量小于额定重量时,程序允许吊机全回转功能运行施工;当货物重量大于额定重量时,吊机声光报警,停止吊钩起升、禁止起升纵移机构向吊臂的悬臂端行进,吊钩缓降至地面或船上;(4)当操作员选择重载工况状态下,操作员控制吊臂回转至对应角度,回转底座锁止;(5)人工将锚定系统的锚定在混凝土中预埋的锚定点;(6)起升纵移机构由幅度控制器控制,走至吊臂的预设点停止;(7)待起吊货物挂上吊钩,吊钩的重力传感器对起吊货物进行称重,当货物重量小于额定重量时,程序允许吊机在锚定状态下进行重载起吊施工,吊臂无转动,起升纵移机构限制位置幅度运行;当货物重量大于额定重量时,吊机声光报警,停止吊钩起升、禁止起升纵移机构向吊臂的悬臂端行进,吊钩缓降至地面或船上。
7.所述吊机的立柱由异步挂篮水平支架承载,立柱顶部的回转底盘上安装吊臂,吊臂的起吊侧安装可平移的起升纵移机构,吊臂的配重侧安装起重卷扬机和移动卷扬机,吊臂上方与立柱对应的位置为上旗杆支撑,吊机还设置锚定系统,锚定系统包括吊臂锚定索a、吊臂锚定索b和吊臂锚定索c,吊臂锚定索a一端锚定在桥梁混凝土中,另一端锚定在吊臂配重侧的中部;吊臂锚定索b的一端锚定在吊臂配重侧并与吊臂锚定索a锚定点一致,另一端锚定在上旗杆支撑的顶部;吊臂锚定索c的一端锚定在上旗杆支撑的顶部并与吊臂锚定索b锚定点一致,另一端锚定在吊臂起吊侧中部。
8.所述立柱的顶部与异步挂篮平台通过若干立柱锚定索连接锚定,异步挂篮平台由挂篮前横梁与中横梁以及之间的x型斜撑构成,立柱锚定索的下锚点位于x型斜撑的四个端点。
9.所述起重卷扬机的钢丝起重绳依次通过起重卷扬机、上旗杆支撑顶部的滑轮、吊臂起吊侧端部的起重滑轮、起升纵移机构滑轮和吊臂回转点处的固接点。
10.所述移动卷扬机的钢丝牵引绳依次通过移动卷扬机、吊臂起吊侧端部的平移滑轮、若干支撑滑轮,钢丝牵引绳的末端连接回到移动卷扬机。
11.所述上旗杆支撑为金字塔锥体结构。
12.所述吊机不设固定的操作室,通过线控、遥控进行远程控制。
13.本发明的工作原理如下:回转吊机的工作状态大致可分为轻载和重载两种工况,轻载是2吨以下,一般用于吊运施工时的小型机具、模板、钢筋等,此状态下吊机可进行全回转,最远可吊13米,以该状态下的满载力矩来控制吊机的空载力矩,仅需用自身的卷扬机作为配重即可满足,不需要另加混凝土块或铁块进行配重。
14.重载起吊重量接近10吨,用于吊运波形钢腹板,在重载状态下,吊机增加了后锚系统,通过吊臂锚定索a、吊臂锚定索b和吊臂锚定索c连接锚定作用,将吊臂悬臂端的起重重力传递至桥梁混凝土处,由此将吊机的倾倒力矩转化为锚定索的拉力,以及对上旗杆支撑的竖直压力。此时,程序控制回转机构锁止,起升纵移机构工作半径达到6米(即大约达到吊臂起重侧长度的一半)时自动停目前移,由于波形钢腹板的目标位置是相对固定的,此时已
经能够满足波形钢腹板10吨重量起吊的需求。此时锚定索的锚点与起升纵移机构的位置几乎重合,因此吊臂长度方向所受到弯曲挠曲应力也可忽略不计。
15.本发明的优点:1、本发明满足设计图对施工机具的总重量的限度,避免临时结构对桥梁造成影响,并能减小吊机对未闭合成环的波形钢腹板产生的扭矩。
16.2、本发明相比现有的异步挂篮吊机,增加了后锚系统,栓锚于桥身混凝土上,从而解决了在重载工况时,吊机倾倒力矩过大,造成吊机结构强度不足,回转底盘受力过大的问题,可大大提高异步挂篮吊机的起重吊装能力;锚绳在使用后可快速拆除,能保证轻载时回转不受干扰。
17.3、锚定索的锚锭位置可选择在混凝土梁的中线上,也可根据吊点的位置,选择在中线左右方向偏心的位置定锚,锚定位置灵活可变,进而吊臂可以进行一定角度内的变化,使用更便捷。
18.4、锚定索锚定时,程序能根据当前工况对回转机构进行锁止,即使操作人员误触回转开关,也不会真的触发回转机制,以保证吊机本身和桥梁的安全。
19.5、吊机不设固定的操作室,通过线控、遥控进行控制,操作人员能更清楚的把握全局。
20.6、本发明该吊机除了可以用于波形钢腹板梁桥的施工,还可以普通混凝土悬臂浇筑的大跨径刚构桥、连续梁桥,特别是当塔吊的臂长无法满足跨中吊重时,本吊机尤为突显其优势,应用范围广泛。
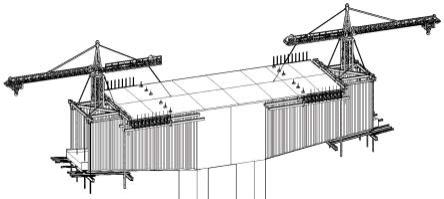
21.附图说明:图1为发明外观总体结构示意图;图2为发明回转吊机外观结构示意图;图3为回转吊机主视结构示意图;图4为回转吊机侧视结构示意图;图5为回转吊机俯视结构示意图;图6为钢丝起重绳走线图;图7为钢丝平移绳走线图;图8为吊机工作逻辑图;图中的序号和部件名称为:1、立柱;11、立柱锚定索;2、吊臂;21、起升纵移机构;22、起重卷扬机;23、移动卷扬机;3、上旗杆支撑;41、吊臂锚定索a;42、吊臂锚定索b;43、吊臂锚定索c。
具体实施方式
22.实施例1一种异步挂篮带锚定系统回转吊机施工方法,包括如下施工步骤:(1)回转吊机启动电源,自检结束后,由操作员进行手动选择吊机工况;(2)当操作员选择轻载工况状态下,吊机程序允许进行全回转施工作业;(3)待起吊货物挂上吊钩,吊钩的重力传感器对起吊货物进行称重,当货物重量小于额定重量时,程序允许吊机全回转功能运行施工;当货物重量大于额定重量时,吊机声光
报警,停止吊钩起升、禁止起升纵移机构向吊臂的悬臂端行进,吊钩缓降至地面或船上;(4)当操作员选择重载工况状态下,操作员控制吊臂回转至对应角度,回转底座锁止;(5)人工将锚定系统的锚定在混凝土中预埋的锚定点;(6)起升纵移机构由幅度控制器控制,走至吊臂的预设点停止;(7)待起吊货物挂上吊钩,吊钩的重力传感器对起吊货物进行称重,当货物重量小于额定重量时,程序允许吊机在锚定状态下进行重载起吊施工,吊臂无转动,起升纵移机构限制位置幅度运行;当货物重量大于额定重量时,吊机声光报警,停止吊钩起升、禁止起升纵移机构向吊臂的悬臂端行进,吊钩缓降至地面或船上。
23.所述吊机的立柱1由异步挂篮水平支架承载,立柱1顶部的回转底盘上安装吊臂2,吊臂2的起吊侧安装可平移的起升纵移机构21,吊臂2的配重侧安装起重卷扬机22和移动卷扬机23,吊臂2上方与立柱1对应的位置为上旗杆支撑3,吊机还设置锚定系统,锚定系统包括吊臂锚定索a41、吊臂锚定索b42和吊臂锚定索c43,吊臂锚定索a41一端锚定在桥梁混凝土中,另一端锚定在吊臂2配重侧的中部;吊臂锚定索b42的一端锚定在吊臂2配重侧并与吊臂锚定索a41锚定点一致,另一端锚定在上旗杆支撑3的顶部;吊臂锚定索c43的一端锚定在上旗杆支撑3的顶部并与吊臂锚定索b42锚定点一致,另一端锚定在吊臂2起吊侧中部;所述立柱1的顶部与异步挂篮平台通过若干立柱锚定索11连接锚定,异步挂篮平台由挂篮前横梁与中横梁以及之间的x型斜撑构成,立柱锚定索11的下锚点位于x型斜撑的四个端点。
24.所述起重卷扬机22的钢丝起重绳依次通过起重卷扬机22、上旗杆支撑3顶部的滑轮、吊臂2起吊侧端部的起重滑轮、起升纵移机构21滑轮和吊臂2回转点处的固接点。
25.所述移动卷扬机23的钢丝牵引绳依次通过移动卷扬机23、吊臂2起吊侧端部的平移滑轮、若干支撑滑轮,钢丝牵引绳的末端连接回到移动卷扬机23。
26.所述上旗杆支撑3为金字塔锥体结构。
27.所述吊机不设固定的操作室,通过线控、遥控进行远程控制。
28.应用实施例:吊臂的起吊侧长度约为13m,吊臂的配重侧长度约为9.3m,上旗杆支撑的高度约为4.5m,吊机总高度约为10.5m,吊臂锚定索a、吊臂锚定索b和吊臂锚定索c采用φ18mm钢丝绳,吊臂锚定索a长度约为6.8m,吊臂锚定索b长度约为8.5m,吊臂锚定索c长度约为8.2m。吊机在未锚定状态最大起升重量为2吨,吊机在锚定后最大起升重量可达到10.13吨。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1