一种移动仿生机械手臂及控制方法
1.本发明属于采样装置技术领域,具体涉及一种移动仿生机械手臂及控制方法。
背景技术:
2.如今在工厂中,为了减小人工成本,在工程中设置可移动式的仿生机械手臂,用于代替人工进行货物运输是比较常见的,然而在仿生机械手臂的长期使用过程中,仿生手夹的老化等意外因数,在物料的夹持运输过程中,容易因为打滑等导致物料从仿生手夹中脱落,掉落在地面上,而仿生机械手臂依然开展运输工作,从而导致物料的损坏。
技术实现要素:
3.本发明的目的是:旨在提供一种移动仿生机械手臂及控制方法,用于解决背景技术中存在的问题。
4.为实现上述技术目的,本发明采用的技术方案如下:
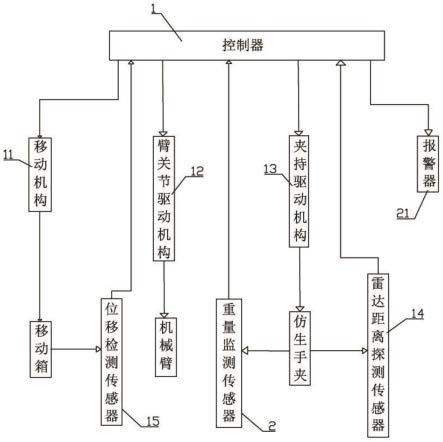
5.一种移动仿生机械手臂,包括移动箱,所述移动箱上侧装配有机械臂,所述机械臂一端装配有仿生手夹,所述移动箱装配有控制器和移动机构,所述机械臂装配有与控制器信号连接的臂关节驱动机构,所述仿生手夹传动连接有与控制器信号连接的夹持驱动机构,所述仿生手夹装配有与控制器信号连接的雷达距离探测传感器,所述移动箱内装配有与移动机构相匹配的位移检测传感器;所述移动机构用于在控制器的控制下带动移动箱移动,从而带动机械臂发生位移;所述臂关节驱动机构用于在控制器的控制下驱动机械臂开始工作,使机械臂能够旋转和折叠;所述夹持驱动机构用于在控制器的控制下驱动仿生手夹进行夹持工作;所述雷达距离探测传感器安装在仿生手夹中部,用于监测夹持物与仿生手夹之间是否发生位移;所述位移检测传感器用于在控制器的控制下对移动机构的移动距离进行实时监测,并可将信号传输给控制器。
6.所述仿生手夹内装配有重量检测传感器,所述重量监测传感器与控制器信号连接。
7.所述移动箱内置有与控制器信号连接的报警器。
8.一种移动仿生机械手臂的机械臂控制方法,所述方法包括以下步骤:
9.步骤一:臂关节驱动机构可带动机械臂开始工作,使机械臂装配有仿生手夹一端靠近放置在工作台上的物料,当仿生手夹位置与物料位置相匹配时,臂关节驱动机构停止工作,此时夹持驱动机构带动仿生手夹开始工作,通过仿生手夹从正上方从将物料夹起,此时臂关节驱动机构再次控制机械臂开始工作,将物料抬起,然后控制器控制移动机构工作,带动移动箱移动,从而通过机械臂与仿生手夹带动物料移动,这样便能完成对物料的搬运;
10.步骤二:在夹持驱动机构带动仿生手夹将物料夹住时,雷达距离探测传感器开始工作,测量雷达距离探测传感器与物料之间的间距,并将间距信号传输给控制器,控制器将该间距信号标记为s1,当臂关节驱动机构工作带动机械臂将物料抬起后,在将物料抬起过程中,每间隔0.5秒雷达距离探测传感器再次检测与物料之间的间距,并实时将间距信号再
次传输给控制器,控制器将在抬起物料的过程中所检测到的间距信号均标记为s2,在物料抬起过程中,若s1=s2臂关节驱动机构持续工作,将物料抬起,当控制器检测到s1<s2时,控制器控制臂关节驱动机构,带动机械臂复位,将物料重新放回工作台上,并通过夹持驱动机构带动仿生手夹取消对物料的夹持,然后再次重复上述过程,通过夹持驱动机构重新对物料进行夹持,夹持完毕后再次通过臂关节驱动机构带动机械臂工作,将物料抬起,若再次检测到s1<s2时,控制器1便再次控制臂关节驱动机构与夹持驱动机构将物料放回工作上,然后停止工作;
11.步骤三:在搬运过程前,将机械臂的极限伸长距离和工作台的高度录入在控制器中,此时控制器可计算出能够保持将物料放在工作台上,而移动箱距离工作台的最大极限距离,控制器将该信号标记为a1,当在步骤二种,时刻保持s1=s2,机械臂便能完全将物料抬起,此时控制器将控制移动机构开始工作,带动移动箱移动,从而带动物料开始移动,将物料运输到目的地,此时雷达距离探测传感器与位移检测传感器实时开始工作,位移检测传感器对移动机构位移的距离进行检测,并实时将距离信号传输给控制器,控制器将该长度信号标记为a2,并雷达距离探测传感器每隔0.5秒检测与物料之间的间距,并将该信号传输给控制器,控制器将该信号均标记为s3,当控制器检测到s1<s3时,控制器对信号a1和信号a2进行比较,并同时控制移动机构停止工作,取消移动箱的位移,此时当a2≤a1时,控制器控制臂关节驱动机构带动机械臂工作,将物料放回工作台上,并重复对步骤二与步骤三;
12.步骤四:当控制器检测到a2>a1且s1<s3时,控制器控制移动机构停止工作取消移动箱的位移,同时控制器控制臂关节驱动机构带动机械臂工作,通过机械臂带动物料位移,将物料放置在地面上,此时将地面作为新的工作台,依次重复上诉步骤,当再次进行到步骤三且监测到s1<s3时,控制器便控制臂关节驱动机构直接将物料放置在地面上,并停止工作。
13.所述雷达距离探测传感器的间隔监测时间,工作人员可通过控制器1进行调节。
14.当停止工作时,控制器可控制报警器开始报警工作,提醒工作人员运输存在异常。
附图说明
15.本发明可以通过附图给出的非限定性实施例进一步说明。
16.图1为本发明一种移动仿生机械手臂及控制方法的流程结构示意图一;
17.图2为本发明一种移动仿生机械手臂及控制方法的流程结构示意图二;
18.图3为本发明一种移动仿生机械手臂及控制方法的流程结构示意图三;
19.图4为本发明一种移动仿生机械手臂及控制方法的流程结构示意图四;
20.主要元件符号说明如下:
21.控制器1、移动机构11、臂关节驱动机构12、夹持驱动机构13、雷达距离探测传感器14、位移检测传感器15、重量监测传感器2、报警器21。
具体实施方式
22.为了使本领域的技术人员可以更好地理解本发明,下面结合附图和实施例对本发明技术方案进一步说明。
23.如图1-4所示,本发明的一种移动仿生机械手臂,包括移动箱,移动箱上侧装配有
机械臂,机械臂一端装配有仿生手夹,移动箱装配有控制器1和移动机构11,机械臂装配有与控制器1信号连接的臂关节驱动机构12,仿生手夹传动连接有与控制器1信号连接的夹持驱动机构13,仿生手夹装配有与控制器1信号连接的雷达距离探测传感器14,移动箱内装配有与移动机构11相匹配的位移检测传感器15;移动机构11用于在控制器1的控制下带动移动箱移动,从而带动机械臂发生位移;臂关节驱动机构12用于在控制器1的控制下驱动机械臂开始工作,使机械臂能够旋转和折叠;夹持驱动机构13用于在控制器1的控制下驱动仿生手夹进行夹持工作;雷达距离探测传感器14安装在仿生手夹中部,用于监测夹持物与仿生手夹之间是否发生位移;位移检测传感器15用于在控制器1的控制下对移动机构11的移动距离进行实时监测,并可将信号传输给控制器1。
24.仿生手夹内装配有重量检测传感器2,重量监测传感器2与控制器1信号连接。这样的设计可在将物料夹起的过程中,通过重量监测传感器2对物料的重量进行检测,并传输给控制便于工作人员查看。
25.移动箱内置有与控制器1信号连接的报警器21。当运输过程中,设备停止工作时,可在控制1的控制下进行报警工作。
26.一种移动仿生机械手臂的机械臂控制方法,方法包括以下步骤:
27.步骤一:臂关节驱动机构12可带动机械臂开始工作,使机械臂装配有仿生手夹一端靠近放置在工作台上的物料,当仿生手夹位置与物料位置相匹配时,臂关节驱动机构12停止工作,此时夹持驱动机构13带动仿生手夹开始工作,通过仿生手夹从正上方从将物料夹起,此时臂关节驱动机构12再次控制机械臂开始工作,将物料抬起,然后控制器1控制移动机构11工作,带动移动箱移动,从而通过机械臂与仿生手夹带动物料移动,这样便能完成对物料的搬运;
28.步骤二:在夹持驱动机构13带动仿生手夹将物料夹住时,雷达距离探测传感器14开始工作,测量雷达距离探测传感器14与物料之间的间距,并将间距信号传输给控制器1,控制器1将该间距信号标记为s1,当臂关节驱动机构12工作带动机械臂将物料抬起后,在将物料抬起过程中,每间隔0.5秒雷达距离探测传感器14再次检测与物料之间的间距,并实时将间距信号再次传输给控制器1,控制器1将在抬起物料的过程中所检测到的间距信号均标记为s2,在物料抬起过程中,若s1=s2臂关节驱动机构12持续工作,将物料抬起,当控制器1检测到s1<s2时,控制器1控制臂关节驱动机构12,带动机械臂复位,将物料重新放回工作台上,并通过夹持驱动机构13带动仿生手夹取消对物料的夹持,然后再次重复上述过程,通过夹持驱动机构13重新对物料进行夹持,夹持完毕后再次通过臂关节驱动机构12带动机械臂工作,将物料抬起,若再次检测到s1<s2时,控制器1便再次控制臂关节驱动机构12与夹持驱动机构13将物料放回工作上,然后停止工作;
29.步骤三:在搬运过程前,将机械臂的极限伸长距离和工作台的高度录入在控制器1中,此时控制器1可计算出能够保持将物料放在工作台上,而移动箱距离工作台的最大极限距离,控制器1将该信号标记为a1,当在步骤二种,时刻保持s1=s2,机械臂便能完全将物料抬起,此时控制器1将控制移动机构11开始工作,带动移动箱移动,从而带动物料开始移动,将物料运输到目的地,此时雷达距离探测传感器14与位移检测传感器15实时开始工作,位移检测传感器15对移动机构11位移的距离进行检测,并实时将距离信号传输给控制器1,控制器1将该长度信号标记为a2,并雷达距离探测传感器14每隔0.5秒检测与物料之间的间
距,并将该信号传输给控制器1,控制器1将该信号均标记为s3,当控制器1检测到s1<s3时,控制器1对信号a1和信号a2进行比较,并同时控制移动机构11停止工作,取消移动箱的位移,此时当a2≤a1时,控制器1控制臂关节驱动机构12带动机械臂工作,将物料放回工作台上,并重复对步骤二与步骤三;
30.步骤四:当控制器1检测到a2>a1且s1<s3时,控制器1控制移动机构11停止工作取消移动箱的位移,同时控制器1控制臂关节驱动机构12带动机械臂工作,通过机械臂带动物料位移,将物料放置在地面上,此时将地面作为新的工作台,依次重复上诉步骤,当再次进行到步骤三且监测到s1<s3时,控制器1便控制臂关节驱动机构12直接将物料放置在地面上,并停止工作。
31.雷达距离探测传感器14的间隔监测时间,工作人员可通过控制器1进行调节。当停止工作时,控制器1可控制报警器21开始报警工作,提醒工作人员运输存在异常。
32.本发明设计巧妙,在将物料抬起的过程中,对物料相对于仿生手夹的位置进行实时检测,当检测到物料发生位移时,便重新将物料放置在工作台上,重新进行夹取,提高对物料的保护功能,当在运输过程中,发现物料发生位移时,若此时的距离能够直接将物料放回工作台,便停止移动直接将物料再次放回工作台,若此时距离不能够直接将物料放回工作台,也停止移动,直接将物料放置在地面上,这样的设计可在物料夹取运输过程中,若物料开始缓慢进行化滑落时,可自动将物料放置在合适的位置上,相对于物料直接从仿生手夹上掉落在地面提高了对物料的保护功能,及时在复位放回的过程中,依然会减小物料与撞击面的距离,从而尽可能减小的物料的撞击高度,对物料进行保护,且本方法在条件允许的情况下优先将物料放回工作台,这样的设计是因为工作台高度高于地面,可尽可能减少物料的放回时间,还能尽可能减小物料的撞击高度,这样便能有效的对物料进行保护。
33.上述实施例仅示例性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1