一种基于重力储能的升降电梯定位系统及方法与流程
1.本发明涉及升降梯仓内物料定位控制技术领域,特别涉及一种基于重力储能的升降电梯定位系统及方法。
背景技术:
2.升降梯,应用于各类高密度仓储仓库。升降梯除了快速准确地需要完成自身的上升与下降工作,现在与流水线体的协调工作也越来越频繁。具体地讲,它与流水线体需要进一步地物料准确对接,不仅需要完成物料上下楼层之间传输性工作,还要在指定楼层上的指定位置进行精准地物料输送操作。这就需要频繁控制升降梯能快速精确对仓内物料进行识别定位并自动修复物料位置,完成楼层间地传输性工作并保证在指定楼层地指定位置实现物料摆放,进而升降梯仓内对物料识别定位以及控制方法提出了较高的要求。
技术实现要素:
3.本发明的目的是提供一种基于重力储能的升降电梯定位系统,通过利用激光视觉结合测距传感器的融合方式,升降梯自动实现仓内对物料的高精度识别、定位,并对仓内物料进行修正位置到居中,最终完成对应楼层的指定位置的精确摆放输送功能。
4.本发明的上述技术目的是通过以下技术方案得以实现的:一种基于重力储能的升降电梯定位系统,包括粗定位装置和二次精定位装置;粗定位装置包括十字激光发生器和相机,十字激光发生器发出十字激光直线到物料砖块表面,根据相机拍摄到的十字激光直线与物料重力砖的边界,得到两者的初步位置关系,来对重力砖进行初次定位并位置修正;二次精定位装置包括三个激光测距传感器,其中两个激光测距传感器沿x向且存在水平间距,用于在两个位置检测与重力砖一侧侧面之间的距离;一个激光测距传感器沿y向设置,用于检测与重力砖相邻侧侧面之间的距离,x垂直于y向,来对重力砖进行二次定位并位置修正。
5.本发明的目的还在于提供一种基于重力储能的升降电梯定位方法,自动实现仓内对物料的高精度识别、定位,并对仓内物料进行修正位置到居中,最终完成对应楼层的指定位置的精确摆放输送功能。
6.本发明的上述技术目的是通过以下技术方案得以实现的:一种基于重力储能的升降电梯定位方法,包括如下步骤,步骤s100:进行视觉激光初定位,根据相机拍摄到的十字激光直线与物料重力砖的边界,得到两者的初步位置关系,并计算物料重力砖相对于十字激光直线的偏转角度θ1、x向偏距
△
x1和y向偏距
△
y1,根据该计算结果进行初步居中移动;步骤s200:进行激光测距精定位,通过两个x向的激光测距传感器计算得到物料重力砖的偏转角度θ2、x向距离
△
x2,通过y向的激光测距传感器得到y向距离
△
y2,根据该计算结果完成重力砖在升降梯内的激光测距二次定位,使得重力砖能够在升降梯内居中摆放完
成。
7.更进一步地,步骤s100具体包括,步骤s110:通过rgv小车将物料重力砖运送到升降梯内指定位置,等到rgv小车从待机位置向重力砖储能区的放下砖块后,控制相机实时拍摄激光图像;步骤s130:通过十字激光的直线与物料重力砖的边界得到两者的初步位置关系;步骤s140:得到物料重力砖与升降梯的相对初步位置;步骤s150:通过物料重力砖与升降梯的相对初步位置进行初步居中移动。
8.更进一步地,步骤s130中,得到十字激光将物料重力砖的边界中一长边分割为a_l、a_r,两短边分别分割为b_l、b’_l、b_r、b’_r,其中,b_l与b_r分别与a_l、a_r相邻,利用上述的距离值得到物料重力砖与升降梯的相对初步位置。
9.更进一步地,步骤s140中,具体计算得到相对偏角,x方向偏距
△
x1,y方向偏距
△
y1。
10.更进一步地,步骤s130中具体包括,步骤s131:通过高斯变换对相机拍摄的图像进行滤波处理;步骤s132:对滤波后的图像进行canny边缘检测处理,计算出每个图像中每个像素点的梯度和方向,应用双阈值法区分强边缘和弱边缘,提取左侧激光直线对应标识框的边缘信息,得到边缘信息图像;步骤s133:对得到的边缘信息图像进行膨胀处理,得到膨胀图像;步骤s134:将每个膨胀图像里的边缘信息进行外轮廓提取;步骤s135:将外轮廓结合对应的边缘信息图像,利用最小二乘法线性拟合模拟激光直线和重力砖的边缘直线;步骤s136:得出步骤s130中需要的距离间隔。
11.更进一步地,步骤s100中还包括步骤s120:确认视野内是否有物料重力砖出现,预设若干roi区域,对roi区域内进行图像处理,进行识别十字激光直线以及砖块的边界直线,通过是否能抓取到物料重力砖的边界直线,即判断升降梯仓内是否有砖块。
12.更进一步地,步骤s200具体包括,步骤s210:通过两个x向激光测距传感器对重力砖进行激光测距分别得到l1和l2,而两个x向激光测距传感器之间的间距为l,得到二次定位位置信息,相对偏角和x方向距离;步骤s220:对重力砖进行x方向和角度校准;步骤s230:通过y方向激光测距传感器对重力砖进行激光测距,得到距离l3,通过液压平台对重力砖进行y方向校准;步骤s240:最终完成重力砖在升降梯内的激光测距二次定位,使得重力砖能够在升降梯内居中摆放完成。
13.更进一步地,步骤s220具体包括,判断和是否在设定阈值内,以判断x方向和角度是否居中,如果不在阈值内,则对重力砖进行x方向和角度校准,直到判断x方向和角度达到阈值。
14.更进一步地,步骤s230具体包括,判断l3是否在设定阈值内,以判断y方向是否居
中,如果不在阈值内,通过液压平台对重力砖进行y方向校准,直到判断l3达到设定阈值内。
15.综上所述,本发明具有以下有益效果:本发明基于重力储能的升降梯仓内物料定位系统及方法,通过激光视觉识别初定位和激光测距的二次定位,二者结合的方式下,实现对物料重力砖的前后,左右、角度的自动校正功能,从而为升降梯进行所有楼层能准确实现重力砖的精准运输,实现重力储能中升降梯内物料的高重复的精度定位,双套保障系统可靠性,可以尽量避免安全事故;保证了定位系统的稳定性,具有人工干预少、自动化程度高、可靠性强的特点;其既利用了相机的高精度激光识别技术实时捕捉重力砖的位置,实现了初步定位,也结合了传统的激光测距定位手段,实现了重力砖的二次定位,最终完成实现升降梯仓内对物料居中摆放,能有效将定位误差控制在1mm以内,使得整个系统误差得到有效控制。
附图说明
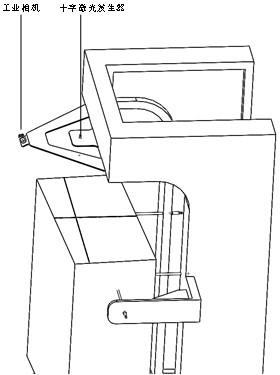
16.图1是本发明基于重力储能的升降梯仓内激光视觉定位系统的结构示意图;图2是本发明基于重力储能的升降梯仓内的激光测距二次定位的结构示意图;图3是本发明基于重力储能的升降梯仓内的激光视觉定位的原理图;图4是本发明基于重力储能的升降梯仓内的激光测距二次定位的原理图。
具体实施方式
17.下面结合附图对本发明的具体实施方式作进一步说明,本实施例不构成对本发明的限制。
18.本发明公开了一种基于重力储能的升降电梯定位系统,该视觉定位系统设置于重力储能结构的移动升降梯内,升降梯外的楼层功能划分为重力砖的储能区和重力砖的发电区,升降梯在重力砖的储能区与发电区之间传输运行;该系统配合于带液压横移的升降梯,升降梯内连接调整框架,调整框架上固定多个液压升降装置(或剪叉式升降平台等升降装置),来实现载物的放置,调整框架上设置两个调整点(每个调整点连接两个油缸,油缸两端分别铰接于升降梯和调整点,且初始位置相互垂直),通过分别驱动两个调整点在水平面内的移动,来实现调整框架的平移和旋转,其亦可通过平移装置和旋转装置分别实现调整框架的平移和旋转,以根据定位情况调整载物的位置。
19.该定位系统包括粗定位装置和二次精定位装置;如图1所示,粗定位装置包括主控单元以及升降梯仓内的十字激光发生器和相机,十字激光发生器发出十字激光直线到物料砖块表面(为了便于计算,十字激光发生器发出十字激光中心位于升降电梯的中心位置,物料砖块的调整目标为中心与十字激光中心重合并关于两条激光线对称设置),通过视觉抓取激光直线的情况来判断有无物料,并根据相机拍摄到的十字激光直线与物料重力砖的边界,得到两者的初步位置关系,来对重力砖进行初次定位并位置修正;如图2所示,二次精定位装置包括升降梯仓内的三个激光测距传感器,其中两个激光测距传感器沿x向且存在水平间距(x方向左侧激光测距传感器、x方向右侧激光测距传感器),用于在两个位置检测与重力砖一侧侧面之间的距离;一个激光测距传感器沿y向设置
(y方向激光测距传感器),用于检测与重力砖相邻侧侧面之间的距离,x垂直于y向,实现对物料重力砖的前后、左右、角度的自动校正功能,来对重力砖进行二次定位并位置修正,最终完成实现升降梯仓内对物料居中摆放,从而为升降梯进行所有楼层能准确实现重力砖的精准运输。
20.本发明还公开了一种基于重力储能的升降电梯定位方法,包括如下步骤,步骤s100:进行视觉激光初定位,根据相机拍摄到的十字激光直线与物料重力砖的边界,得到两者的初步位置关系,并计算物料重力砖相对于十字激光直线的偏转角度θ1、x向偏距
△
x1和y向偏距
△
y1,根据该计算结果进行初步居中移动;其具体包括,步骤s110:通过rgv小车将物料重力砖运送到升降梯内指定位置,等到rgv小车从待机位置向重力砖储能区的放下砖块后,通过主控单元控制工业相机实时监控,拍摄激光图像;步骤s120:通过相机判断视野内有无物料,确认视野内是否有物料重力砖出现;具体的,预设若干roi区域,对roi区域内进行图像处理,进行识别十字激光直线以及砖块的边界直线,通过是否能抓取到物料重力砖的边界直线,即判断升降梯仓内是否有砖块,该步骤亦可通过压力或红外传感器等传感装置感应得到;步骤s130:如图3所示,通过相机结合十字激光的直线与物料重力砖边界的视觉位置关系(即十字激光),得到两者的初步位置关系;本实施例中,得到十字激光将物料重力砖的边界中下侧长边分割为a_l、a_r,两短边分别分割为b_l、b’_l、b_r、b’_r,其中,b_l与b_r分别与a_l、a_r相邻,利用上述的距离值得到物料重力砖与升降梯的相对初步位置。
21.其中,十字激光的直线与物料重力砖的边界的像素间隔的计算过程具体包括,步骤s131:通过高斯变换对相机拍摄的图像进行滤波处理;步骤s132:对滤波后的图像进行canny边缘检测处理,计算出每个图像中每个像素点的梯度和方向,应用双阈值法区分强边缘和弱边缘,提取左侧激光直线对应标识框的边缘信息,得到边缘信息图像;步骤s133:对得到的边缘信息图像进行膨胀处理,得到膨胀图像;步骤s134:将每个膨胀图像里的边缘信息进行外轮廓提取;步骤s135:将外轮廓结合对应的边缘信息图像,利用最小二乘法线性拟合模拟激光直线和重力砖的边缘直线,将位于中间水平的激光直线作为是十字激光y方向直线,位于中间竖直的激光直线作为十字激光x方向直线,将位于下方的直线作为重力砖的底部边界直线,上方的直线作为重力砖的顶部边界直线,左侧的直线作为重力砖的左侧边界直线,右侧的直线作为重力砖的右侧边界直线;步骤s136:通过上述的各个直线算出各自的交点,得出将(,,,,,)的距离间隔(与也可根据预设的载物宽度计算得出,使得步骤s135仅需根据两十字十字激光线与一长边、两短边的交点确定,而无需引入另一长边)。
22.步骤s140:利用上述距离值,得到物料重力砖与升降梯的相对初步位置;即可计算得到相对偏角,为了使得x方向保持居中(==),
计算x方向偏距(x方向亦可通过其中一短边的分割数据如
△
y1一般计算),为了使得y方向保持居中(=),计算y方向偏距(y方向亦可通过两长边的分割数据如
△
x1一般计算,本实施例中,由于长边长度大,误差小,粗定位中其仅以一边计算);步骤s150:通过物料重力砖与升降梯的相对初步位置,即上述计算结果进行初步居中移动;其可以一次拍照并根据计算结果进行移动,而本实施例中,先计算相对偏角,并进行角度偏移,再二次拍照,重新根据新的距离值计算x方向偏距
△
x1、y方向偏距
△
y1,完成x与y方向的平移。
23.步骤s200:进行激光测距精定位,得到物料的左右、前后、角度关系:通过两个x向的激光测距传感器计算得到物料重力砖的偏转角度θ2、x向距离
△
x2,通过y向的激光测距传感器得到y向距离
△
y2(通过x方向的左右两侧激光测距传感器进行左右、角度位置修正,y方向的激光测距传感器进行前后位置修正),根据该计算结果完成重力砖在升降梯内的激光测距二次定位,使得重力砖能够在升降梯内居中摆放完成。
24.其具体包括,步骤s210:如图4所示,通过两个x向激光测距传感器对重力砖进行激光测距分别得到l1和l2,而两个x向激光测距传感器之间的间距为l,得到二次定位位置信息:相对偏角,x方向距离;步骤s220:对重力砖进行x方向和角度校准;具体包括,判断和是否在设定阈值(阈值为预设的角度误差范围以及x向合格的距离范围)内,以判断x方向和角度是否居中,如果不在阈值内,则对重力砖进行x方向和角度校准,直到判断x方向和角度达到阈值,其可以先调整,满足阈值后调整,也可以在每次调整时皆同时计算调整和;步骤s230:通过y方向激光测距传感器对重力砖进行激光测距,得到距离l3,通过液压平台对重力砖进行y方向校准;具体包括,判断l3是否在设定阈值(阈值为预设的y向合格的距离范围)内,以判断y方向是否居中,如果不在阈值内,通过液压平台对重力砖进行y方向校准,直到判断l3达到设定阈值内。
25.步骤s240:最终完成重力砖在升降梯内的激光测距二次定位,使得重力砖能够在升降梯内居中摆放完成。
26.本发明基于激光视觉识别和激光测距的结合下的双重定位方法,那通过两次定位(视觉激光初定位以及激光测距二次定位)来判断电梯仓内的物料重力砖是否到达居中位置指定位置,相对比传统的位置反馈或者传统的激光测距等方法,具有稳定性高、高精度、高效性的定位特点;其提升了定位系统的运行速度,既利用了相机视觉判断物料有无,以及
图像上激光直线的定位识别,可靠性强,又结合激光测距的二次定位修正,保证了定位系统的稳定性,准确性。
27.以上所述,仅是本发明的较佳实施例而已,不用于限制本发明,本领域技术人员可以在本发明的实质和保护范围内,对本发明做出各种修改或等同替换,这种修改或等同替换也应视为落在本发明技术方案的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1