一种自动装盒系统及其使用方法与流程
1.本发明涉及包装设备技术领域,尤其涉及一种自动装盒系统及其使用方法。
背景技术:
2.在白酒包装技术领域,常见的白酒装盒方式如图14和图15所示,图14为开盖式结构的盒体,即将盒盖打开、将酒瓶装入盒体后盖上盒盖;图15为盒身、盒座的分体式结构,酒瓶放入盒座内,然后套入盒身。目前白酒装入酒盒的动作都是人工操作、自动化程度低,导致白酒装盒效率低。
技术实现要素:
3.本发明为了解决现有技术中的人工装盒导致效率低的问题,提供了一种瓶体装盒效率高、稳定性好的自动装盒系统及其使用方法。
4.为了实现上述目的,本发明采用如下技术方案:一种自动装盒系统,包括机架,所述机架内设有沿机架分布的工位输送线,所述工位输送线的一侧设有盒体输送线、另一侧设有瓶体输送线,机架上依次设有沿着工位输送线分布的盒体转移机构、开盒机构、装盒机构、封盒机构。通过自动化系统来实现瓶体装盒、封盒作业,极大的提高了瓶体装盒效率。
5.作为优选,所述盒体输送线上与盒体转移机构的对应处设有挡板组件;所述工位输送线上设有盒体限位机构。盒体自由的进入盒体输送线,遇到挡板组件后,盒体紧密的排列在一起、定位,从而便于盒体转移机构抓取盒体。
6.作为优选,所述机架上与开盒机构的对应处设有用于检测打开后的盒体内是否存在异物的异物检测机构。异物检测机构用于检测盒体内是否存在异物。
7.作为优选,所述机架上位于开盒机构与装盒机构之间设有预留工位区。可以根据实际需求在预留工位处增加相应的工位,例如在预留工位处向盒体内装入说明书、合格证,可以增加扫码工位,或者根据生产节拍在预留工位处增加装盒机构,通过预留工位的设置使得整条生产线的布置更加灵活、兼容性更大。
8.作为优选,所述的盒体输送线、瓶体输送线、工位输送线均设置两条,所述机架上的盒体转移机构、开盒机构、装盒机构、封盒机构均设置两组。
9.作为优选,所述的开盒机构、封盒机构均包括机械手本体、抓手支架、设在抓手支架上的抓手机构,所述抓手支架与机械手本体之间可拆卸连接。抓手支架与机械手本体之间可拆卸连接,从而根据不同的盒体快速更换不同的抓手机构,通用性强。
10.作为优选,所述机械手本体的下端固定有上连接板,所述抓手支架上固定有下连接板,所述下连接板的两端固定有锁扣座,所述上连接板的两端设有与锁扣座扣合的锁扣,所述的锁扣与锁扣座配合形成所述的可拆卸连接。打开锁扣使得锁扣与锁扣座分离,就能快速的将抓手机构与机械手本体分离,更换抓手机构非常方便。
11.作为优选,所述的抓手机构包括若干抓手本体,所述的抓手本体包括固定座、导气
座、连接固定座与导气座的导气杆,导气杆的侧面设有气孔,所述固定座与抓手支架连接,所述导气座的下端设有若干吸盘,所述导气杆上设有滑动座,滑动座的下端固定有若干滑动穿过导气座的导杆,所述导杆的下端设有压板,所述压板上与吸盘的对应处设有避让孔,导气杆设有与滑动座弹性抵接的第一弹性件。当盒体为盒身、盒座分体式结构时,采用该种抓手机构,压板下压与盒身顶面接触将盒身顶面压平,机械手本体继续向下移动,滑动座向上移动,吸盘吸附盒身后通过机械手将盒身与盒座分离;封盒时,盒身套入盒座后,吸盘松开,压板通过弹力作用将盒身压平整。
12.作为优选,所述导气杆的上端穿过固定座与固定座滑动连接,导气杆的上端设有上限位件,导气杆上位于固定座的下侧设有下限位件,导气杆上位于固定座与下限位件之间设有第二弹性件。
13.作为优选,所述的抓手机构包括与抓手支架转动连接的转轴、与转轴固定的若干吸盘架、设在吸盘架上的吸盘,抓手支架上设有驱动转轴转动的第一动力;抓手支架上设有第二动力,所述第二动力上连接有用于盒盖旋转复位的复位压条。当盒体为翻转开盖式结构时,吸盘吸住盒盖,第一动力带动转轴转动,吸盘将盒盖翻转打开;封盒时,第一动力带动转轴反向转动将盒盖转动一定的位置(限位压条的下方),最后通过第一动力继续带动转轴反向转动,吸盘将盒盖盖上。
14.一种自动装盒系统的使用方法,包括以下步骤:s1:盒体沿着盒体输送线移动至盒体转移机构处时被挡板组件阻挡,使得盒体转移机构下侧的盒体紧密排列,瓶体沿着瓶体输送线移动;s2:盒体转移机构抓取紧密排列的盒体、对盒体进行分距,分距后的盒体转移至工位输送线并被盒体限位机构限位,盒体沿着工位输送线移动至开盒机构处;s3:若盒体为开盖式结构,则开盒机构吸取盒盖、打开盒盖,盒体沿着工位输送线移动至装盒机构处;若盒体为盒身、盒座分体式结构,则开盒机构抓取盒身使得盒身与盒座分离并将盒身转移至盒体输送线上,盒座沿着工位输送线移动至装盒机构处;s4:若盒体为开盖式结构,则装盒机构将瓶体抓取后装入盒体内,盒体移动至封盒机构处,封盒机构将盒盖盖上实现封盒作业;若盒体为盒身、盒座分体式结构,则装盒机构将瓶体抓取后装入盒座内,盒座、盒身同步移动至封盒机构处,封盒机构抓取盒体输送线上的盒身并将盒身套入盒座实现封盒作业;s5:封盒后的盒体沿着工位输送线输出。
15.因此,本发明具有瓶体装盒效率高、稳定性好的有益效果。而且能适用于两种不同盒体的装盒作业,通用性强。
附图说明
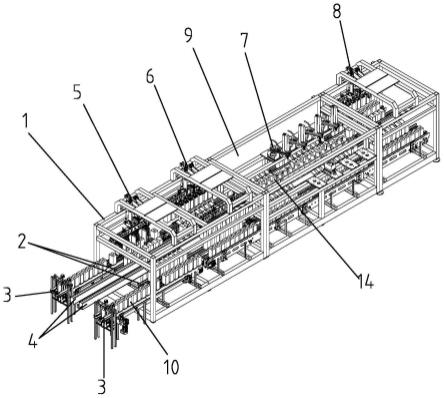
16.图1为发明的整体的结构示意图。
17.图2为图1的另一视角的结构示意图。
18.图3 为图1的正视图。
19.图4为图1的俯视图。
20.图5为盒体转移机构的结构示意图。
21.图6为图5的局部结构示意图。
22.图7为开盒机构(封盒机构)的第一种实施方式。
23.图8图7的爆炸图。
24.图9为图7中的抓手本体的结构示意图。
25.图10为图9的爆炸图。
26.图11为开盒机构(封盒机构)的第二种实施方式。
27.图12为图11的侧视图。
28.图13为异物检测机构的结构示意图。
29.图14为开盖式的盒体结构示意图。
30.图15为盒身、盒座分体式的盒体结构示意图。
31.图中:机架1、工位输送线2、盒体输送线3、瓶体输送线4、盒体转移机构5、机械手50、连接支架51、滑杆52、滑动座53、分距机构54、分距气缸540、拉杆541、抓盒组件55、前夹板550、后夹板551、夹持气缸552、开盒机构6、机械手本体60、抓手支架61、抓手机构62、转轴620、吸盘架621、第一动力622、第二动力623、限位压条624、上连接板63、下连接板64、锁扣座65、锁扣66、抓手本体67、固定座670、导气座671、导气杆672、气孔673、吸盘674、滑动座675、导杆676、压板677、避让孔678、第一弹性件679、上限位件680、下限位件681、第二弹性件682、装盒机构7、封盒机构8、预留工位区9、盒体10、盒身100、盒盖101、盒座102、瓶体14、异物检测机构15、横梁150、滑轨151、滑块组件152、摄像头组件153、电机154、传动带155。
具体实施方式
32.下面结合附图和具体实施方式对本发明作进一步描述:如图1-图4所示的一种自动装盒系统,包括机架1,机架内设有沿机架分布的工位输送线2,工位输送线2的一侧设有盒体输送线3、另一侧设有瓶体输送线4,机架1上依次设有沿着工位输送线分布的盒体转移机构5、开盒机构6、装盒机构7、封盒机构8;盒体输送线上与盒体转移机构的对应处设有挡板组件;工位输送线上设有盒体限位机构。本实施例中的盒体限位机构为工位输送线自带的。
33.如图5和图6所示,盒体转移机构5包括机械手50、与机械手可拆卸连接的连接支架51,连接支架的下侧设有两根平行的滑杆52,滑杆上设有若干滑动座53,滑动座之间设有分距机构54,每个滑动座的下侧均设有抓盒组件55;分距机构包括分距气缸540,分距气缸的一端通过连接座与连接支架固定连接,分距气缸的另一端与最外侧的滑动座连接,相邻两个滑动座之间设有带长槽孔的拉杆541,当分距气缸的轴缩入时,滑动座靠拢在一起,当分距气缸的轴伸出时,最外侧的滑动座向外移动将每个滑动座依次拉开、分距;抓盒组件55包括前夹板550、后夹板551,前夹板与滑动座固定连接,滑动座内与后夹板的上端对应处固定有与后夹板连接的夹持气缸552。
34.机架1上与开盒机构的对应处设有用于检测打开后的盒体内是否存在异物的异物检测机构15;机架上位于开盒机构与装盒机构之间设有预留工位区9。如图13所示,异物检测机构15包括设在机架下侧的横梁150、固定在横梁上的滑轨151、沿着滑轨滑动的滑块组件152,滑块组件的上侧设有摄像头组件153,横梁的两端之间设有与滑块组件连接的、通过
电机154驱动的传动带155;摄像头组件在传动带的作用下沿着滑轨移动,从而对摄像头上方的盒身(盒身、盒座分体式机构)进行拍摄、识别、检测异物(摄像头拍摄后的画面、图片处理、异物识别技术为现有技术,在此不展开赘述)。如果盒体为开盖式结构,异物检测机构15安装在机架上侧,摄像头组件朝下安装。
35.本实施例中的盒体输送线3、瓶体输送线4、工位输送线2均设置两条,机架上的盒体转移机构、开盒机构、装盒机构、封盒机构均设置两组。一个机架内配置两条装盒产线,提高装盒效率,提高空间利用率。
36.如图7和图8所示,开盒机构6、封盒机构8均包括机械手本体60、抓手支架61、设在抓手支架上的抓手机构62,抓手支架与机械手本体之间可拆卸连接;机械手本体60的下端固定有上连接板63,抓手支架61上固定有下连接板64,下连接板的两端固定有锁扣座65,上连接板的两端设有与锁扣座扣合的锁扣66,锁扣与锁扣座配合形成所述的可拆卸连接。
37.如图9和图10所示,抓手机构62包括若干抓手本体67,抓手本体包括固定座670、导气座671、连接固定座与导气座的导气杆672,导气杆672的侧面设有与外部气管连接的气孔673,固定座670与抓手支架连接,导气座671的下端设有若干吸盘674,导气杆上设有滑动座675,滑动座的下端固定有若干滑动穿过导气座的导杆676,导杆的下端设有压板677,压板上与吸盘的对应处设有避让孔678,导气杆设有与滑动座弹性抵接的第一弹性件679;导气杆672的上端穿过固定座670与固定座滑动连接,导气杆的上端设有上限位件680,导气杆上位于固定座的下侧设有下限位件681,导气杆上位于固定座与下限位件之间设有第二弹性件682。本实施例中的第一弹性件679、第二弹性件682采用压簧。
38.如图11和图12所示的抓手机构的另一实施方式:抓手机构62包括与抓手支架转动连接的转轴620、与转轴固定的若干吸盘架621、设在吸盘架上的吸盘674,抓手支架上设有驱动转轴转动的第一动力622;抓手支架上设有第二动力623,第二动力上连接有用于盒盖端部限位的限位压条624。本实施例中的第一动力622、第二动力623均采用气缸。
39.该种自动装盒系统对图14所示的盒体进行装盒时,开盒机构6、封盒机构8均采用图11所示的抓手机构;该种自动装盒系统对图15所示的盒体进行装盒时,开盒机构6、封盒机构8均采用图9所示的抓手机构。
40.一种自动装盒系统的使用方法,包括以下步骤:s1:盒体沿着盒体输送线移动至盒体转移机构处时被挡板组件阻挡,使得盒体转移机构下侧的盒体紧密排列,瓶体沿着瓶体输送线移动;s2:盒体转移机构抓取紧密排列的盒体、对盒体进行分距,分距后的盒体转移至工位输送线并被盒体限位机构限位,盒体沿着工位输送线移动至开盒机构处;s3:若盒体为开盖式结构(图14所示的盒体结构),则开盒机构吸取盒盖、打开盒盖,盒体沿着工位输送线移动至装盒机构处;若盒体为盒身、盒座分体式结构(图15所示的盒体结构),则开盒机构抓取盒身使得盒身与盒座分离并将盒身转移至盒体输送线上,盒座沿着工位输送线移动至装盒机构处;s4:若盒体为开盖式结构,则装盒机构将瓶体抓取后装入盒体内,盒体移动至封盒机构处,封盒机构将盒盖盖上实现封盒作业;若盒体为盒身、盒座分体式结构,则装盒机构将瓶体抓取后装入盒座内,盒座、盒
身同步移动至封盒机构处,封盒机构抓取盒体输送线上的盒身并将盒身套入盒座实现封盒作业;s5:封盒后的盒体沿着工位输送线输出。
41.通过该种自动装盒系统能将瓶体自动装入盒体内并封盒,从而极大的提高瓶体装盒效率;同时还能通过更换不同的抓手机构以适用于不同的盒体装盒,通用性强。
42.在本发明的描述中,需要理解的是,上下左右、内端、外端、一端、另一端等指示的方向或位置关系为基于附图所示的方位或位置关系,仅是为了更加清楚的便于描述本发明的技术方案,而不是指示或者暗示所指的装置或者元件必须具备特定的方向、以特定的方位构造和操作,不能理解为对本发明的限定。
43.以上仅为本发明的具体实施例,但本发明的技术特征并不局限于此。任何以本发明为基础,为解决基本相同的技术问题,实现基本相同的技术效果,所作出的简单变化、等同替换或者修饰等,皆涵盖于本发明的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1