一种基于物联网的物流仓储用智能上下货系统的制作方法
1.本发明涉及物流仓储技术领域,尤其涉及一种基于物联网的物流仓储用智能上下货系统。
背景技术:
2.仓储物流,就是利用自建或租赁库房、场地、储存、保管、装卸搬运、配送货物。
3.现有的物流仓储对于小型的纸盒包装好的货物时,需要人工进行登高拿取和放置位于高出的货物,需要重复进行登高上下移动,会加大工作人员的劳动量,同时频繁登高具有一定的危险性,工作人员容易发生摔倒事故,在拿取货物较多时,降低了取货或者上货的效率。
技术实现要素:
4.基于现有的物流仓储对于小型的货物时,需要人工进行登高拿取和放置位于高出的货物,会加大工作人员的劳动量,工作人员容易发生摔倒事故,降低了取货或者上货的效率技术问题,本发明提出了一种基于物联网的物流仓储用智能上下货系统。
5.本发明提出的一种基于物联网的物流仓储用智能上下货系统,包括货架,还包括设置在所述货架一侧的传送带、传输装置、驱动装置、存放装置以及拿取装置;传输装置,所述传送装置包括用于带动货物移动的链条以及滚轮,所述传送装置位于所述货架的外表面,所述链条的和所述滚轮的转动能够带动货物进行移动工作;驱动装置,所述驱动装置位于所述货架的外侧面并对所述货架上的多个所述传输装置进行选择性驱动工作;存放装置,所述存放装置包括用于存放货物的存放箱以及环形滑道,所述存放装置位于所述传输装置的外表面,所述环形滑道对所述存放箱进行支撑工作;拿取装置,所述拿取装置包括用于根据货物位置调整的五轴机械臂以及夹板,所述五轴机械臂带动所述夹板对所述存放箱内的货物进行夹取工作。
6.优选地,所述传输装置还包括链轮,所述两个所述链轮的外表面通过轴承与所述货架的外侧面固定安装,所述链条的外表面与所述链轮的外表面啮合,所述链条的链销外表面固定安装有呈等距离分布的十字架,所述十字架的一端与所述滚轮的一端转动连接;通过上述技术方案,十字架的一端与链条的滚圈转动连接,通过链条的转动带动存放箱进行移动,实现存放箱货物的快速上下货,滚轮能够对存放箱保持稳定。
7.优选地,所述货架的外侧面开设有限位槽,所述货架的外侧面固定安装有限位块,所述限位块的外表面和所述限位槽的内壁均与所述滚轮的外表面滑动连接;通过上述技术方案,通过限位槽和限位块对滚轮的限位,防止链条带动存放箱遇到两端移动时发生偏转,使得存放箱始终保持稳定,不会发生偏转,重心始终保持向下。
8.优选地,所述驱动装置包括支撑架,多个所述支撑架的一端均与所述货架的外侧面固定安装,所述支撑架的两端转动连接有转动轴,所述转动轴的外表面通过锥齿轮组与
所述链轮的一端转动连接;通过上述技术方案,锥齿轮组是由两个锥齿轮构成,一个锥齿轮固定安装在转动轴上,另一个锥齿轮固定安装在链轮的一端,通过转动轴的转动能够链轮的转动。
9.优选地,所述货架的外侧面固定安装有驱动升降平台,所述驱动升降平台的滑块外表面固定安装有驱动电机,所述驱动电机的输出轴一端通过齿轮组驱动所述转动轴的转动;通过上述技术方案,驱动升降平台是由电机、限位架、丝杆以及滑块构成,通过电机带动丝杆的转动,丝杆带动与限位架滑动插接的滑块进行水平升降运动,齿轮组为两个齿轮构成,一个齿轮固定安装在驱动电机输出轴一端,另一个齿轮固定安装在转动轴的外表面,通过改变驱动电机的位置,驱动电机输出轴一端的齿轮能够与不同的转动轴上的齿轮安装,实现对不同高度的链轮进行驱动其转动,减少成本的投入,通过一个驱动电机实现多个链条的转动。
10.优选地,所述存放箱的外侧面与所述链条的链销固定安装,所述存放箱的外侧面通过铰链铰接有箱盖,所述存放箱和所述箱盖之间设置有碰珠锁扣,所述碰珠锁扣对所述箱盖与存放箱之间进行按压固定,所述存放箱的内底壁设置有称重盘,所述箱盖的外侧面固定安装有识别标签;通过上述技术方案,通过碰珠锁扣将箱盖和存放箱之间实现关闭,通过按压箱盖,实现箱盖的打开,便于拿取货物,箱盖的关闭能够防止仓储内的小型货物的掉落,称重盘内部设置沉重传感器,称重传感器对存放箱内的货物重量进行检测,通过在物流管理系统内输入单个货物的重量,通过称重盘能够对存放箱内的货物的数量进行检测,标签通过读写器的识别,能够对存放箱内的货物进行识别和定位,便于五轴机械臂快速寻找到货物。
11.优选地,所述环形滑道的外表面与所述货架的外表面固定安装,所述存放箱的外表面通过连接杆转动连接有滚珠,所述滚珠在所述环形滑道的内壁滑动连接;通过上述技术方案,通过滚珠在环形滑道内壁的滚动,能够实现对存放箱的支撑和限位,降低链条的压力,和滑槽的配合能够使得存放箱稳定的移动。
12.优选地,所述拿取装置还包括拿取移动平台,所述拿取移动平台的外表面与所述货架的底座外表面固定安装,所述拿取移动平台的滑块外表面与所述五轴机械臂的下表面固定安装,所述五轴机械臂的一端固定安装有支撑板,所述支撑板的外表面分别固定安装有摄像头和读写器;通过上述技术方案,通过摄像头对拿取的货物进行识别和定位,读写器对存放箱上的标签进行识别,多重验证,防止拿取货物出错。
13.优选地,所述五轴机械臂的一端固定安装有推动液压缸,所述推动液压缸的活塞杆一端固定安装有真空吸盘,所述货架的外侧面固定安装有呈等距离分布的放置板,所述真空吸盘的一端固定安装有按压块;通过上述技术方案,通过推动液压缸的推动,能够使得按压块对箱盖的按压,箱盖能够倾倒落在放置板上进行支撑,真空吸盘在推动液压缸的推动下能够对存放箱内的货物进行吸附移动,实现对货物的快速拿取。
14.优选地,所述支撑板的下表面固定安装有限位槽体,所述限位槽体的内壁分别与两个所述夹板的外表面滑动插接,所述支撑板的外侧面固定安装有夹持液压缸,所述夹持
液压缸的活塞杆一端与所述夹板的一端固定安装,所述夹板的一端固定安装有推动齿条,所述支撑板的外侧面通过轴承固定安装有传递齿轮,所述推动齿条的外侧面与所述传递齿轮的外表面啮合;通过上述技术方案,通过一个夹板的移动带动推动齿条的移动,通过传递齿轮的传递,带动另一个夹板上的推动齿条进行相对或者相对的移动,实现对货物的夹持工作。
15.本发明中的有益效果为:1、通过设置传输装置,能够对拿取的货物进行自动移动,通过链条的转动能够带动存放箱进行平稳的移动,同时存放箱通过滚轮的在滑槽内的限位,保持存放箱在遇到链条转动至链轮上时,也不会发生倾斜,从而能够自动实现调整需要取货的存放箱到达五轴机械臂拿取的位置,减少人工的投入,解决了现有的物流仓储对于小型的货物时,需要人工进行登高拿取和放置位于高出的货物,会加大工作人员的劳动量,工作人员容易发生摔倒事故,降低了取货或者上货的效率技术问题。
16.2、通过设置驱动装置和传输装置,能够控制多个传输装置进行驱动,通过一个驱动电机控制多个传输装置的中链轮工作,根据需要拿取货物的位置控制驱动电机的移动,驱动电机能够带动需要移动的存放箱的链轮位置,带动链轮的转动,从而实现货物的调整,同时一个驱动电机减轻货架的重量和投入,自动进行货物的调整,解决了现有的物流仓储对于小型的货物时,需要人工进行登高拿取和放置位于高出的货物,会加大工作人员的劳动量,工作人员容易发生摔倒事故,降低了取货或者上货的效率技术问题。
17.3、通过设置拿取装置,能够自动进行上下货工作,通过真空吸盘的吸取货物后,通过夹板的夹持能够带动货物的移动,对货物进行上下货工作,减少人工的投入,同时通过读写器和称重盘能够实现自动统计货物的进出工作,使得物流仓储的管理更加便捷,从而减少人工的投入,解决了现有的物流仓储对于小型的货物时,需要人工进行登高拿取和放置位于高出的货物,会加大工作人员的劳动量,工作人员容易发生摔倒事故,降低了取货或者上货的效率技术问题。
附图说明
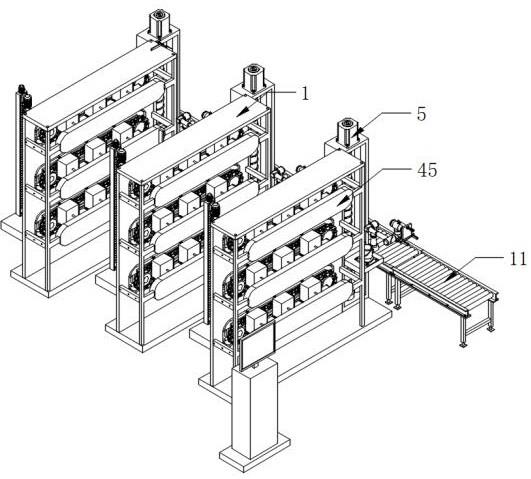
18.图1为本发明提出的一种基于物联网的物流仓储用智能上下货系统的示意图;图2为本发明提出的一种基于物联网的物流仓储用智能上下货系统的货架结构的立体图;图3为本发明提出的一种基于物联网的物流仓储用智能上下货系统的链条结构的立体图;图4为本发明提出的一种基于物联网的物流仓储用智能上下货系统的十字架结构的立体图;图5为本发明提出的一种基于物联网的物流仓储用智能上下货系统的驱动电机结构的立体图;图6为本发明提出的一种基于物联网的物流仓储用智能上下货系统的箱盖结构的立体图;图7为本发明提出的一种基于物联网的物流仓储用智能上下货系统的称重盘结构的立体图;
图8为本发明提出的一种基于物联网的物流仓储用智能上下货系统的拿取移动平台结构的立体图;图9为本发明提出的一种基于物联网的物流仓储用智能上下货系统的五轴机械臂结构的立体图;图10为本发明提出的一种基于物联网的物流仓储用智能上下货系统的推动液压缸结构的立体图;图11为本发明提出的一种基于物联网的物流仓储用智能上下货系统的拿取液压缸结构的立体图;图12为本发明提出的一种基于物联网的物流仓储用智能上下货系统的夹板结构的立体图。
19.图中:1、货架;11、传送带;2、链轮;21、链条;22、十字架;23、滚轮;24、限位槽;25、限位块;3、支撑架;31、转动轴;32、驱动升降平台;33、驱动电机;4、存放箱;41、箱盖;42、碰珠锁扣;43、称重盘;44、识别标签;45、环形滑道;46、滚珠;5、拿取移动平台;51、五轴机械臂;52、支撑板;53、推动液压缸;54、摄像头;55、读写器;56、真空吸盘;57、放置板;58、按压块;6、限位槽体;61、夹板;62、夹持液压缸;63、推动齿条;64、传递齿轮。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
21.参照图1-12,一种基于物联网的物流仓储用智能上下货系统,包括货架1和操作台,操作台中设置有现有的仓库管理系统,还包括设置在货架1一侧的传送带11、传输装置、驱动装置、存放装置以及拿取装置,传送带11围绕货架1设置。
22.如图2-4所示,传输装置,传送装置包括用于带动货物移动的链条21以及滚轮23,传送装置位于货架1的外表面,链条21的和滚轮23的转动能够带动货物进行移动工作。
23.传输装置,安装在货架1的外侧面,为了进行自动带动货物进行移动,传输装置还包括链轮2,两个链轮2的外表面通过轴承与货架1的外侧面固定安装,为了带动链条21的转动,将链条21的外表面与链轮2的外表面啮合,为了防止货物在移动过程中发生偏移,在链条21的链销外表面固定安装有呈等距离分布的十字架22,然后十字架22的一端与滚轮23的一端转动连接,十字架22四端都分布有滚轮23,位于十字架22分布的上下滚轮23的长度大于左右滚轮23的长度。
24.为了对滚轮23进行限位,在货架1的外侧面开设有限位槽24,为了对滚轮23滚轮23在设定的轨道内滚动,在货架1的外侧面固定安装有限位块25,限位块25的外表面和限位槽24的内壁均与滚轮23的外表面滑动连接。
25.如图5所示,驱动装置,驱动装置位于货架1的外侧面并对货架1上的多个传输装置进行选择性驱动工作。
26.驱动装置,安装在货架1的外侧面位置上,为了自动带动多组传输装置的转动,驱动装置包括支撑架3,多个支撑架3的一端均与货架1的外侧面固定安装,为了带动链轮2的转动,在支撑架3的两端转动连接有转动轴31,转动轴31的外表面通过锥齿轮组与链轮2的一端转动连接,锥齿轮组是由两个锥齿轮构成,一个锥齿轮固定安装在转动轴31上,另一个
锥齿轮固定安装在链轮2的一端,通过转动轴31的转动能够链轮2的转动。
27.为了自动进行带动多个链轮2的转动,在货架1的外侧面固定安装有驱动升降平台32,驱动升降平台32是由电机、限位架、丝杆以及滑块构成,通过电机带动丝杆的转动,丝杆带动与限位架滑动插接的滑块进行水平升降运动,为了带动链条21的转动,在驱动升降平台32的滑块外表面固定安装有驱动电机33,驱动电机33的输出轴一端通过齿轮组驱动转动轴31的转动,齿轮组为两个啮合的齿轮构成,一个齿轮固定安装在驱动电机33输出轴一端,另一个齿轮固定安装在转动轴31的外表面。
28.如图6-7所示,存放装置,存放装置包括用于存放货物的存放箱4以及环形滑道45,存放装置位于传输装置的外表面,环形滑道45对存放箱4进行支撑工作。
29.为了带动存放箱4的移动,将存放箱4的外侧面与链条21的链销固定安装,为了便于拿取货物,在存放箱4的外侧面通过铰链铰接有箱盖41,为了对箱盖41进行固定,防止货物的掉落,在存放箱4和箱盖41之间设置有碰珠锁扣42,通过碰珠锁扣42对箱盖41与存放箱4之间进行按压固定,为了对存放箱4内的货物进行计重,在存放箱4的内底壁设置有称重盘43,为了便于识别存放箱4内的货物,箱盖41的外侧面固定安装有识别标签44,货物上粘接有相同的识别标签44。
30.为了对存放箱4进行限位,将环形滑道45的外表面与货架1的外表面固定安装,为了便于存放箱4的移动,存放箱4的外表面通过连接杆转动连接有滚珠46,然后滚珠46在环形滑道45的内壁滑动连接。
31.如图8-12所示,拿取装置,拿取装置包括用于根据货物位置调整的五轴机械臂51以及夹板61,五轴机械臂51带动夹板61对存放箱4内的货物进行夹取工作。
32.为了拿取不同高度的货物,拿取装置还包括拿取移动平台5,拿取移动平台5的外表面与货架1的底座外表面固定安装,拿取移动平台5和驱动升降平台32结构相同,拿取移动平台5的滑块外表面与五轴机械臂51的下表面固定安装用来灵活的拿取货物,五轴机械臂51的一端固定安装有支撑板52,为了识别货物对货物进行定位,在支撑板52的外表面分别固定安装有摄像头54和读写器55。
33.为了对存放箱4内的货物进行拿取,在五轴机械臂51的一端固定安装有推动液压缸53,为了稳定的对存放箱4内的货物进行拿取,推动液压缸53的活塞杆一端固定安装有真空吸盘56,为了便于箱盖41的放下,在货架1的外侧面固定安装有呈等距离分布的放置板57,为了便于箱盖41的开启和关闭,真空吸盘56的一端固定安装有按压块58。
34.为了对货物进行夹持移动,在支撑板52的下表面固定安装有限位槽体6,为了对夹板61进行限位,将限位槽体6的内壁分别与两个夹板61的外表面滑动插接,为了自动调节夹板61之间的间距,支撑板52的外侧面固定安装有夹持液压缸62,然后夹持液压缸62的活塞杆一端与夹板61的一端固定安装,为了一个夹板61的移动带动另一个夹板61的移动,在夹板61的一端固定安装有推动齿条63,支撑板52的外侧面通过轴承固定安装有传递齿轮64,然后推动齿条63的外侧面与传递齿轮64的外表面啮合。
35.工作原理:在需要取货时,通过操作台输入需要拿取的货物,传输到智能上下货系统后,驱动升降平台32带动驱动电机33发生移动,使得驱动电机33移动至货物所在的链条21位置,驱动电机33输出轴上的齿轮与转动轴31上的齿轮啮合后,驱动电机33带动转动轴31转动,转动轴31通过锥齿轮组带动链轮2转动,链轮2的转动带动链条21转动,根据货物的
位置进行驱动链条21转动的方向,使得需要拿取货物的存放箱4保持向五轴机械臂51方向移动,存放箱4上的滚珠46在环形滑道45的内壁进行转动;当货物移动至链轮2的最右端时,链轮2停止转动,五轴机械臂51在拿取移动平台5的带动下向需要拿取货物的存放箱4移动,支撑板52上的读写器55对箱盖41上的识别标签44进行识别后,确定存放箱4内的货物与拿取的货物一致后,推动液压缸53推动真空吸盘56,真空吸盘56上的按压块58对存放箱4上的箱盖41进行按压,碰珠锁扣42被解锁后,箱盖41打开后,箱盖41倾到在放置板57上,支撑板52上的摄像头54对存放箱4内的货物进行再次确定和定位后,推动液压缸53推动真空吸盘56对货物进行吸附,根据吸附位置进行相应调整真空吸盘56的位置;对货物的上表面吸附后,带动货物进行移动至箱盖41的上方,称重盘43中的称重传感器检测到剩下的货物重量,根据系统内的货物数量,和确定拿取的货物的数量,将货物放置在箱盖41的上表面后,支撑板52上的夹持液压缸62推动一个夹板61移动,夹板61的移动带动与之固定安装的推动齿条63发生移动,推动齿条63通过传递齿轮64带动另一个夹板61上的推动齿轮移动,使得限位槽体6内的两个夹板61进行相对移动,夹板61将箱盖41上的货物进行夹取后离开箱盖41;链轮2带动链条21转动,使得存放箱4向下移动,箱盖41随着存放箱4的离开,通过放置板57的抵住发生偏转,推动液压缸53推动箱盖41的外侧面,将箱盖41上的碰珠插接进入存放箱4的锁扣上进行锁定,箱盖41实现关闭,拿取移动平台5带动五轴机械臂51向下移动靠近传送带11,夹板61将货物放置在传送带11上,通过传送带11的传送将货物进行输送,在需要上货时,通过五轴机械臂51上的读写器55识别货物上的标签后,通过标签确定货物需要放置的存放箱4,夹板61夹取后将货物放置在存放箱4内。
36.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1