一种极板旋转输送装置的制作方法
1.本实用新型涉及冶金技术领域,具体涉及一种用于极板旋转输送置。
背景技术:
2.在冶金行业中,根据工艺配置要求,需要对各种阴阳极板进行悬挂输送,输送过程中,有时需要对极板进行90
°
或者180
°
的旋转输送。旋转输送的可靠性以及快速性往往影响着整个极板输送的效率,整个设备的成本也会在一定程度上影响最终设备选型。
3.目前实现极板旋转输送的主要方法有如下几种:
4.第一,利用两套移载装置和横向输送链类似机构进行极板旋转输送,适用于180
°
旋转输送,在90
°
旋转输送较少见,存在设备多、接口多、可靠性差等问题。
5.第二,利用有轨小车,两条输送线间设计地轨,交叉处设计旋转平台实现有轨小车旋转,因小车往复时间长,需要收集多片进行输送,仍需两套移载装置,接口较多,土建较复杂,成本较高。
6.第三、采用机器人移载,通过设计特定夹具,实现极板的快速旋转输送,在一定范围内可现实极板的快速旋转输送,但是对极板的结构形式有一定要求,适用范围有一定局限性,机器人投资成本高。
技术实现要素:
7.本实用新型的目的在于提供一种结构简单、快速可靠、成本低的极板旋转输送装置,在两条成90
°
或180
°
布置的极板输送线之间快速稳定的输送极板。
8.本实用新型提供的这种极板旋转输送装置,包括底座、旋转装置、提升装置和勾取装置,旋转装置包括回转驱动装置和其驱动的旋转臂,回转驱动装置固定于底座的上端,提升装置固定于旋转臂的下侧,勾取装置固定于提升装置上,包括驱动装置和其驱动的勾取环,提升装置带动勾取装置上下运动,驱动装置带动勾取环内外摆动,使勾取环实现对输送线上极板的勾取及提升,旋转臂在布置成90
°
或180
°
的两输送线之间旋转输送极板。
9.上述旋转输送装置的一种实施方式中,所述底座设置于两输送线之间,包括钢管立柱和沿其外壁周向均布的加强筋板及它们两端连接的底板和顶板,底板固定于底面,顶板用于固定所述回转驱动装置。
10.上述旋转输送装置的一种实施方式中,所述旋转臂为直线臂,其一端和回转驱动装置之间通过支撑座连接。
11.上述旋转输送装置的一种实施方式中,所述提升装置包括竖向布置的直线伸缩装置和水平布置的提升梁,直线伸缩装置的活动端与提升梁固定。
12.上述旋转输送装置的一种实施方式中,所述直线伸缩装置连接于所述提升梁的中间位置,提升梁的两端分别通过导向构件与所述旋转臂连接;导向构件为导向套和其匹配的导向柱结构或者为滑槽体和其匹配的滑块结构。
13.上述旋转输送装置的一种实施方式中,所述勾取装置还包括安装架,所述驱动装
置为水平布置的直线伸缩装置,安装架包括连接板和其下侧两端的安装座,直线伸缩装置的固定端连接于安装座上,所述勾取环的上部与另一安装座的底部铰接,直线伸缩装置的活动端与勾取环的顶部连接。
14.上述旋转输送装置的一种实施方式中,所述勾取装置有两套,它们对称布置于所述提升梁的两端下侧,两套勾取装置分别通过所述连接板与提升梁的连接固定。
15.上述旋转输送装置的一种实施方式中,所述直线伸缩装置为油缸、气缸或者电动推杆。
16.上述旋转输送装置的一种实施方式中,所述旋转臂的外端下侧连接有导向支撑装置,导向支撑装置包括安装杆、导向轮和导向轨道,安装杆的上端与旋转臂连接,下端安装导向轮,导向轨道为有c形导向槽的c形轨道,导向轨道固定于两输送线的机架上端之间。
17.上述旋转输送装置的一种实施方式中,所述旋转臂为十字形臂,所述回转驱动装置连接于十字形臂的中心位置下侧。
18.本实用新型将固定回转驱动装置的底座设置于成90
°
或180
°
的两输送线之间,通过回转驱动装置驱动旋转臂进行90度往复旋转或者360
°
回转,通过旋转臂在两条输送线之间输送极板。将旋转臂固定于提升装置上,将勾取装置固定于提升装置上,通过回转驱动装置实现旋转臂的往复转动或者连续回转,即可实现在两条输送线之间快速稳定的输送极板,整个输送装置的结构简单紧凑成本低。
附图说明
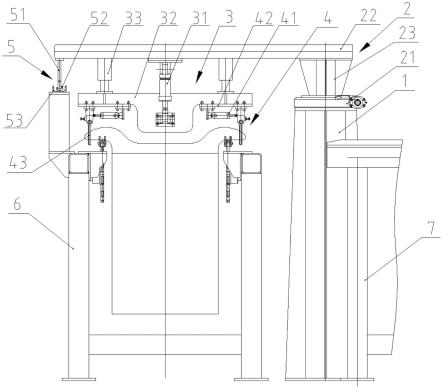
19.图1为本实用新型一个实施例的主视结构示意图。
20.图2为图1中旋转装置的一种俯视放大结构示意图。
21.图3为图1中旋转装置的另一种俯视放大结构示意图。
具体实施方式
22.如图1、图2所示,本实施例公开的这种极板旋转输送装置,适用于在90
°
布置的两条输送线之间输送极板,主要包括底座1、旋转装置2、提升装置3、勾取装置4和导向支撑装置5。
23.底座1设置于两输送线相交角度的角平分线上,包括钢管柱和沿其外壁周向均布的加强筋板及它们两端连接的底板和顶板,底板固定于地面,顶板用于固定旋转装置2。
24.旋转装置2包括回转驱动装置21和其驱动的旋转臂22。本实施例的旋转臂采用直线臂,其一端和回转驱动装置21之间通过支撑座23连接。
25.提升装置3包括直线伸缩装置31、提升梁32和导向构件33。直线伸缩装置31以活动端朝下布置,提升梁32为水平布置的t形梁,直线伸缩装置31的活动端通过连接座固定于提升梁32长度方向一侧的中间位置。提升梁3的顶面两端对称连接导向构件33,导向构件33包括导向套和其匹配的导向杆,导向套的上端固定于旋转臂的下侧,导向杆的下端固定于提升梁的顶面。
26.直线伸缩装置31伸缩杆的伸出和回缩配合导向构件33的导向实现提升梁的上下运动。
27.勾取装置4包括直线伸缩装置41、安装架42和勾取环43,直线伸缩装置水平布置,
安装架42包括连接板和其下侧两端的安装座,直线伸缩装置41的固定端固定于安装座上,勾取环43的上部与另一安装座的底部铰接,直线伸缩装置41的活动端与勾取环43的顶部连接。
28.直线伸缩装置41伸缩杆的伸出和回缩实现勾取环43的摆动以勾住和松开极板。
29.直线伸缩装置31和直线伸缩装置41可采用气缸、液压缸或者电动推杆之中的一种。
30.导向支撑装置5包括安装杆51、导向轮52和导向轨道53,安装杆51的上端与旋转臂22连接,下端安装导向轮52,导向轨道53为有c形导向槽的c形轨道。
31.导向轨道53固定于旋转臂外端对应两输送线的机架上端之间。
32.上述旋转输送装置的工作过程如下:
33.(1)极板起吊
34.旋转装置2的初始工作位置位于第一条输送线6的上方,提升装置3的直线伸缩装置31的伸缩杆处于缩回状态,提升梁32处于上位,勾取装置4的直线伸缩装置41的伸缩杆处于缩回状态,勾取环43的下部处于向外打开的状态。
35.当极板到达旋转臂22的初始位置时,提升装置3的直线伸缩装置31的伸缩杆伸出,提升梁32及安装于其下侧的勾取装置4下降到工作位,然后勾取装置4的直线伸缩装置41的伸缩杆伸出,使勾取环43下部向内摆动勾住极板横梁。
36.提升装置3的直线伸缩装置31的伸缩杆缩回,带动极板上升脱离输送线链条,完成极板起吊工作。
37.(2)极板旋转输送
38.回转驱动装置21工作,使旋转臂22向第二条输送线7运动。
39.当旋转臂旋转90
°
,使极板到达第二条输送线上方时,提升装置3的直线伸缩装置31的伸缩杆伸出,带动提升梁32和极板下降至第二条输送线上,勾取装置4的直线伸缩装置41的伸缩杆缩回,勾取环43的下部向外摆动打开脱离极板横梁,极板下放至第二条输送线上,提升装置3的直线伸缩装置31回到初始状态。
40.(3)回转驱动装置21反向工作,旋转臂22反向旋转90
°
回到第一条输送线的上方,进入下一块极板的旋转输送工序。
41.从上述旋转输送装置的结构和工作过程可以看出,底座通过钢管柱下端的底板固定于地面,占地面积小,便于在两条输送线之间设置。
42.旋转装置采用回转驱动装置实现旋转臂的正向和反向旋转,结构简单,且可使旋转臂的运动稳定。旋转臂外端与两条输送线的机架上端之间设置导向支撑装置,通过导向轮在c形导向轨道的行走可进一步提高旋转臂运动的稳定性。
43.提升装置设置于旋转臂的下侧,勾取装置设置于提升装置的提升梁下侧,结构紧凑,同时在提升装置的提升梁和旋转臂之间设置导向构件,可保证勾取装置的勾取环稳定的上下运动和内外摆动,使其可灵活的勾取极板并将其提升脱离输送线,然后旋转输送至另一条输送线上。
44.总结来说,旋转装置通过回转驱动装置驱动,提升装置设置于旋转臂上,勾取装置设置于提升装置上这种结构紧凑设计,可快速可靠的在两条布置成90
°
的输送线之间旋转输送极板。
45.本实施例的旋转臂可采用十字形臂替换直线臂,在十字形臂的中心位置设置与回转驱动装置连接的支撑座,在十字形臂的四根支臂外端下侧分别连接导向轮,这样可通过十字形臂的连续回转运动来更高效的旋转输送极板,如图3所示。
46.很明显,上述装置也适用在180
°
布置的两条输送线之间旋转输送极板。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1