一种用于狭小空间的货叉式AGV的制作方法
一种用于狭小空间的货叉式agv
技术领域
1.本实用新型涉及一种转运装置,具体为一种用于狭小空间的货叉式agv,属于无人搬运车(automated guided vehicle)技术领域。
背景技术:
2.随着agv技术的不断发展,取代人力搬运的叉车agv已经问世,但其多由传统电动叉车本体基础上改造而成,其缺点不仅不适用于狭小空间的货物转运,而且货叉局限于竖直方向移动,不便于货物搬运,并且影响搬运效率。
3.检索可知,申请号为202020432450.9的中国专利公开了一种小型叉车agv,包括底盘和货叉。该技术方案不仅整车尺寸依然较大,不适用于在狭小空间里进行货物转运;而且货叉只能在竖直方向上移动,无法在水平方向上进行移动。
4.此外,申请号为202020165955 .3的中国专利文献公开了一种装车码垛装置及装车系统,包括装车码垛装置,装车码垛装置包括货叉、货叉伸缩机构、货叉升降机构以及挡板机构。该技术方案虽能实现了货叉的全向运动,但不仅叉车的整体尺寸仍然较大,而且货物只能放置在货叉上,搬运的稳定可靠性欠佳。同时缺乏确保安全的避障设施。
技术实现要素:
5.本实用新型的目的在于,针对现有技术存在的不足,通过合理的结构设计,提出一种可以完成在狭小空间稳定灵活转运的货叉式agv。
6.为实现上述目的,本实用新型的基本技术方案为:包括底部装有车轮的车体底板,所述车体底板的后部安置前侧中部凹陷的电控箱;
7.所述中部凹陷的两侧分别装有与车体底板固连的朝前延伸横向导轨,两横向导轨中间装有支撑在车体底板上的轴向约束横向丝杆,所述两横向导轨上分别通过横向滑块与垂向的滑台板构成水平移动副;
8.所述滑台板的底部装有与横向丝杆构成螺旋副的横向螺母,且两侧分别装有纵向导轨,两纵向导轨中间装有支撑在滑台板上的轴向约束纵向丝杆,所述两纵向导轨分别通过纵向滑块与货叉构成垂向移动副,所述货叉的内侧装有与纵向丝杆构成螺旋副的纵向螺母;所述横向丝杆和纵向丝杆分别与相应的驱动电机传动联接;
9.所述中部凹陷的电控箱内两侧分别安置电池,且后面设置急停开关、电源开关、触摸控制屏;
10.所述滑台板的宽度与所述中部凹陷的宽度相配,所述货叉的长度与车体底板前端至中部凹陷底部的距离相配。
11.采用本实用新型后,一方面,通过控制横向丝杆和纵向丝杠的驱动电机,可使货叉按需分别或同时在水平与竖直方向移动,从而方便地自动完成货物的叉装交接搬运;另一方面,具有中部凹陷的电控箱合理安置电池以及开关、触摸屏等控制器件,便于操控,货叉收回状态可以全位于车体底板上、滑台板收纳于中部凹陷,充分利用了底板的承载面积,不
仅显著减小了前后占用空间、转运灵便安全,而且由于可将货物通过货叉收回到车体底板上,避免了货物承载在前伸货叉上可能发生的颠簸抖动,而货叉收回时滑台板嵌在中部凹陷内,确保了转运稳定可靠。
12.本实用新型进一步的完善是:所述车体底板的底部四边中间分别装有机械避障装置,所述机械避障装置包括l形安装板,所述l形安装板的垂向面朝外延伸出上、下间隔的滚轮支撑板,所述上、下间隔的滚轮支撑板外端安装外侧伸出车体底板边的垂向轴轮滚。无论哪一个方向发生意外与外界发生碰撞,轮滚均可起到保护作用。
13.本实用新型再进一步的完善是:所述车体底板底部两侧分别装有前、后二个麦克纳姆轮,所述前、后二个麦克纳姆轮之间装有驱动电机防爆壳。借助麦克纳姆轮可实现全向移动,防爆隔离可提高安全性。
14.本实用新型更进一步的完善是:前、后机械避障装置的l形安装板水平面固定在车体底板下表面,左、右机械避障装置的l形安装板与相应的驱动电机防爆壳连接。
15.本实用新型又进一步的完善是:所述车体底板上呈对角布置两组激光传感器,所述车体底板下装有二维码读码器。因此可以采用激光导航与二维码导航的组合导航方式,当agv运行时,二维码读码器实时读取二维码的信息数据,将信息传给车载计算机,得到小车的方位,通过位置信息进行引导沿规定的路径行走。
16.本实用新型还进一步的完善是:所述电控箱上安置有报警装置以及光通讯模块,所述报警装置下方安置无线通讯模块。当agv发生意外及故障时可发出声光报警,采用光通讯与无线通讯的组合通讯方式,实现上位机与agv的通讯,提高通信数据的安全性。
附图说明
17.下面结合附图对本实用新型做进一步的说明。
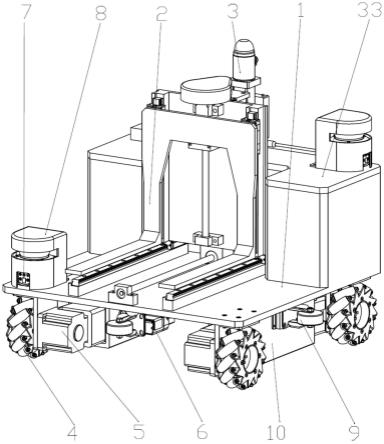
18.图1是本实用新型一个实施例的立体结构示意图。
19.图2是图1另一视角的立体结构示意图。
20.图3是图1实施例的车体底板及电控箱内的俯视结构示意图。
21.图4是图1实施例中货叉组件的立体结构示意图。
22.图5是图4另一视角的立体结构示意图。
23.图6是图1实施例的仰视结构示意图。
24.图7是图1实施例中机械避障装置的立体结构示意图。
25.图8是图1实施例叉取货物状态立体结构示意图。
26.图9是图1实施例转运货物状态立体结构示意图。
27.图10是图1实施例应用在转运通道内的立体结构示意图。
28.附图中:1、车体底板,2、货叉组件,3、报警装置,4、麦克纳姆轮,5、驱动电机,6、二维码读码器,7、激光传感器,8、激光传感器防爆壳,9、机械避障装置,10、驱动电机防爆壳,11、光通讯模块,12、触摸控制屏,13、无线通讯模块,14、急停开关,15、电源开关,16、电池,17、plc模块,18、货叉,19、横向导轨,20、横向丝杆,21、纵向丝杆,22、纵向导轨,23、横向滑块,24、横向丝杆齿轮,25、横向移动电机,26、滑台板,27、横向螺母,28、纵向移动电机,29、纵向丝杆齿轮,30、纵向滑块,31、滚轮,32、滚轮支撑板,33、电控箱,34、转运通道,35、l形安装板。
具体实施方式
29.本实施例用于狭小空间的货叉式agv如图1至图5所示,车体底板1底部装有四组驱动电机5驱动的麦克纳姆轮4,具体为四组麦克纳姆轮4设置在车体底板1底部,呈对称布置。车体底板1的底部两侧分别装有位于前后麦克纳姆轮4之间的驱动电机防爆壳10,将驱动电机5包裹。
30.车体底板1的后部安置前侧中部凹陷的电控箱33,中部凹陷的两侧分别安装与车体底板1固连的朝前延伸横向导轨19,两横向导轨19中间装有支撑在车体底板1上的轴向约束横向丝杆20,横向丝杆20与安置在车体底板1上的横向移动电机25通过横向丝杆齿轮24传动联接,两横向导轨19上分别通过横向滑块23与垂向的滑台板26构成水平移动副。滑台板26的底部装有与横向丝杆20构成螺旋副的横向螺母27,滑台板26的两侧分别装有纵向导轨22,两纵向导轨22中间装有支撑在滑台板26上的轴向约束纵向丝杆21,纵向丝杆21与安置在滑台板26上的纵向移动电机28通过纵向丝杆齿轮29传动联接,两纵向导轨22分别通过纵向滑块30与货叉18构成垂向移动副,货叉18的内侧装有与纵向丝杆21构成螺旋副的纵向螺母。
31.本实施例如图6和图7所示,四组机械避障装置9分别安装在车体底板1底部的四边中间, 具体结构为机械避障装置9的l形安装板35的垂向面朝外延伸出上、下间隔的滚轮支撑板32,上、下间隔的滚轮支撑板32外端安装外侧伸出车体底板边的垂向轴的轮滚31。前、后机械避障装置9的l形安装板35水平面固定在车体底板1下表面,而左、右机械避障装置9的l形安装板35则分别与相应的驱动电机防爆壳10连接。由于本实施例在四个方向上设置有机械避障装置,因此无论哪一个方向发生意外与外界发生碰撞,均可有效得到保护。
32.此外,本实施例的两组激光传感器7在车体底板1上呈对角布置,其中一个设置在电控箱33上,可在agv运行时进行激光避障与导航。激光传感器防爆壳8与车体底板1连接,设置在激光传感器7上,并将激光传感器7包裹。报警装置3以及用于agv与上位机进行通讯的光通讯模块11安置在电控箱33上。无线通讯模块13位于报警装置3下方,用于与上位机进行无线通讯。
33.工作时,货叉18既可按需在水平方向前后移动,也可在竖直方向上下移动,两方向的移动可分别独立进行,也可复合进行。如图9所示,当需要叉取货物时,货叉18在水平方向上向前伸出以及按需竖直方向上向下移动既可;当转运货物时,如图10所示,货叉18收回,货物可通过货叉18被放置在车体底板1上。
34.本实施例具有中部凹陷的电控箱33结构十分巧妙合理,因为通常车体底板1的总宽大于货叉18宽度,而中部凹陷的电控箱33充分利用了车体底板1的总宽,将电池16设置在电控箱33内两侧,提供agv运行的动力;plc模块17设置在电控箱33中后部,用于控制agv;急停开关14、电源开关15、触摸控制屏12均设置在电控箱33后面,便于操控;而且,由于货叉18宽度与中部凹陷的宽度相配、货叉18的长度与车体底板1前端至中部凹陷底部的距离相配,因此货叉可以完全位于车体底板上。这样,一方面显著减小了前后占用空间,转运灵便安全,同时彻底避免了现有技术货物承载在前伸货叉上转运过程中的颠簸抖动,确保了转运稳定可靠。尤其是,滑台板的宽度与中部凹陷的宽度相配,货叉收回时,滑台板正好嵌在中部凹陷中,从而借助电控箱使货叉组件稳定就位,确保了转运可靠。
35.实际应用时,如图10所示,本实施例的货叉式agv用于在狭小空间的转运通道34内
运行,通过车体底板1下的二维码读码器6扫描装在转运通道34底面的二维码或装在转运通道34内的激光反射板进行导航,之后按需进行前进、后退、左右转弯、侧向移动、原地旋转等移动,货叉则在水平与竖直方向按需移动,自动完成货物的平稳交接和搬运,有效提搬运效率和质量。
36.总之试验表明,本实施例的货叉式agv与现有技术相比,具有如下优点:
37.(1)货叉与车体底板分体,货叉可在水平与竖直方向上进行独立移动和组合移动,对于货物的交接和搬运更方便、更具实用性;
38.(2)整车尺寸为680mm
×
660mm
×
720mm(l
×w×
h),相较于传统的叉车式agv,结构紧凑、尺寸小巧,非常适于在狭小的空间内进行货物搬运转移,同时可在狭小空间内进行全向运动,提高了agv的灵活性;
39.(3)设有激光传感器和机械避障装置,用于对agv进行激光避障和机械避障,两种组合避障方式可保证agv在各种运行模式下均能安全运行;
40.(4)电池、驱动电机、传感器等主要的电气元件均设置有防爆隔离装置,可有效提高agv的防爆安全性;
41.(5)搬运货物时,货物可放置在货叉上,货叉收回放置在车体底板上,从而货物被放置在车体底板上,既减小了占用空间,又提高了货物转运的稳定性。
42.除上述实施例外,本实用新型还可以有其他实施方式。凡采用等同替换或等效变换形成的技术方案,均落在本实用新型要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1