用于制造产品的设施的制作方法
1.本实用新型涉及一种用于制造产品、特别是用于制造减速器壳体的技术设施/系统,该技术设施包括用于供应原料的供料区、用于由原料制造产品的至少一个制造区、用于清洗产品的清洗区、用于装运/发运产品的装运区/发运区和用于在其余区域之间分配原料和产品的分配区。
背景技术:
2.使用由供应的原料制造产品的技术设施是已知的,该技术设施包括用于供应原料的供料区、用于由原料制造产品的制造区、用于清洗产品的清洗区和用于装运产品的装运区。被供应给技术设施的原料暂时存放在供料区中,然后被运输到制造区。在制造区中制造的产品被运输到清洗区。然后将清洗过的产品暂时存放在装运区中,直到从技术设施运走。
3.在制造工厂中制造减速器时,还由供应的原料制造用于减速器的壳体。然后将制成的减速器壳体运输到装配站,在装配站处例如装入齿轮。
4.de 10 2017 002 963a1公开了一种制造设施和一种用于制造产品、尤其是减速电机的制造设施的运行方法。
技术实现要素:
5.因此,本实用新型的目的是,改进用于制造产品、特别是用于制造减速器壳体的技术设施。
6.该目的通过具有下述特征的用于制造产品的技术设施来实现。
7.根据本实用新型的用于制造产品、特别是用于制造减速器壳体的技术设施包括用于供应原料的供料区、用于由原料制造产品的至少一个制造区、用于清洗产品的清洗区、用于装运产品的装运区和用于在供料区、至少一个制造区、清洗区和装运区之间分配原料和产品的分配区。
8.供料区具有第一运输机器人,其配置成将供应的原料从供料区的物料站运送到供料区的码垛站。分配区具有第二运输机器人,其配置成将原料从码垛站运送到至少一个制造区的进料站并将制成的产品从至少一个制造区的移交站运送到清洗区的输入站。清洗区具有输送机,其配置成将制成的产品从输入站运送到清洗区的清洗站并将清洗过的产品从清洗站运送到装运区的打包站。装运区具有第三运输机器人,其配置成将产品从打包站运送到装运区的集装箱站。
9.在根据本实用新型的设施中,可以以自动化的方式制造产品、特别是减速器壳体。尽可能地取消了人员的耗费体力的劳动,例如装卸原料和产品。在技术设施的危险区域中不需要人员在场。这也提高了人员的安全性。
10.根据本实用新型的一优选的改进方案,该技术设施还包括至少一辆无人驾驶运输车,该无人驾驶运输车配置成:将装有原料的集装箱运送到物料站;将空集装箱从物料站运送到集装箱站;将装有产品的集装箱从集装箱站运走。因此,即使在将集装箱运输到技术设
施和从技术设施运走集装箱时,也不需要人员。由此有利地提高了技术设施的效率。
11.根据本实用新型的一有利的改进方案,供料区具有摄像机,其配置成检测位于物料站处的集装箱中的原料。因此,对原料的检测也是自动化的,由此避免了在使用原料方面的错误。
12.根据本实用新型的一优选的设计方案,第一运输机器人配置成从位于物料站处的集装箱中取出原料并将原料放在位于码垛站处的托盘上。
13.根据本实用新型的一有利的设计方案,第一运输机器人配置成从位于物料站处的集装箱中取出分隔层并将分隔层放在位于收集站处的集装箱中。
14.根据本实用新型的一有利的设计方案,第二运输机器人配置成将位于码垛站处的、在其上装有原料的托盘运送到至少一个制造区的进料站。第二运输机器人还配置成将位于至少一个制造区的移交站处的、在其上装有产品的托盘运送到输入站。
15.根据本实用新型的一有利的设计方案,输送机配置成将位于输入站处的、在其上装有产品的托盘运送到清洗站。输送机还配置成将位于清洗站处的、在其上装有产品的托盘运送到打包站。
16.根据本实用新型的一优选的设计方案,第三运输机器人配置成从位于打包站处的托盘中取出产品并将产品放在位于集装箱站处的集装箱中。
17.根据本实用新型的一有利的设计方案,第三运输机器人配置成从位于填充站处的集装箱中取出填充物并将填充物放在位于集装箱站处的集装箱中。
18.根据本实用新型的一有利的设计方案,装运区具有打印机,该打印机配置成生成用于标记集装箱的标签,第三运输机器人配置成将生成的标签固定到集装箱站处的被装有产品的集装箱上。
19.根据本实用新型的一有利的设计方案,第三运输机器人配置成将位于打包站处的空托盘运送到存放站;第二运输机器人配置成将位于存放站处的空托盘运送到码垛站。
20.根据本实用新型的一有利的设计方案,第二运输机器人配置成将位于至少一个制造区的进料站处的空托盘运送到该至少一个制造区的移交站。
21.本实用新型不局限于上述特征组合。对于本领域技术人员而言,特别是从目的提出和/或通过与现有技术相比较而提出的目的,可得到上述特征组合和/或单项上述特征和/或以下要说明的特征和/或附图特征的其它合理的组合可能性。
附图说明
22.现在根据附图详细说明本实用新型。本实用新型不局限于在附图中示出的实施例。附图仅示意性地示出本实用新型的主题。图中示出:
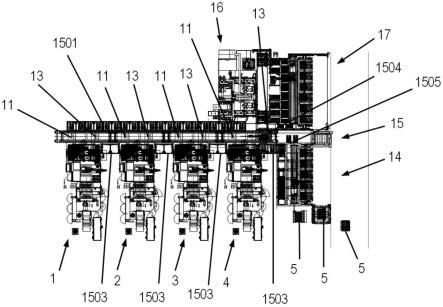
23.图1示出技术设施的示意图,
24.图2示出技术设施的供料区的示意图,和
25.图3示出技术设施的清洗区和装运区的示意图。
26.附图标记列表:
[0027]1ꢀꢀꢀꢀꢀ
第一制造区
[0028]2ꢀꢀꢀꢀꢀ
第二制造区
[0029]3ꢀꢀꢀꢀꢀ
第三制造区
[0030]4ꢀꢀꢀꢀꢀ
第四制造区
[0031]5ꢀꢀꢀꢀꢀ
无人驾驶运输车
[0032]
11
ꢀꢀꢀꢀ
进料站
[0033]
13
ꢀꢀꢀꢀ
移交站
[0034]
14
ꢀꢀꢀꢀ
供料区
[0035]
1402
ꢀꢀ
码垛站
[0036]
1403
ꢀꢀ
第一运输机器人
[0037]
1404
ꢀꢀ
物料站
[0038]
1405
ꢀꢀ
码垛缓冲区
[0039]
1406
ꢀꢀ
摄像机
[0040]
1407
ꢀꢀ
收集站
[0041]
1408
ꢀꢀ
停车区
[0042]
15
ꢀꢀꢀꢀ
分配区
[0043]
1501
ꢀꢀ
产品缓冲区
[0044]
1503
ꢀꢀ
物料缓冲区
[0045]
1504
ꢀꢀ
第二运输机器人
[0046]
1505
ꢀꢀ
存放站
[0047]
16
ꢀꢀꢀꢀ
清洗区
[0048]
1601
ꢀꢀ
清洗站
[0049]
1602
ꢀꢀ
输送机
[0050]
1603
ꢀꢀ
输入站
[0051]
1604
ꢀꢀ
打包站
[0052]
1605
ꢀꢀ
集装箱站
[0053]
1606
ꢀꢀ
打印机
[0054]
1608
ꢀꢀ
第三运输机器人
[0055]
17
ꢀꢀꢀꢀ
装运区
[0056]
1701
ꢀꢀ
填充站
具体实施方式
[0057]
图1示出技术设施的示意图。该技术设施用于由原料制造产品,特别是用于制造减速器壳体。所需的原料、例如钢板被运输到技术设施。在技术设施中由原料制造产品、特别是减速器壳体。然后将制成的产品从技术设施运走。
[0058]
该技术设施包括用于供应原料的供料区14。该技术设施还包括第一制造区1、第二制造区2、第三制造区3和第四制造区4。制造区1、2、3、4 用于由原料制造产品。该技术设施还包括用于清洗所制成的产品的清洗区 16、用于装运产品的装运区17和用于在供料区14、制造区1、2、3、4、清洗区16和装运区17之间分配原料和产品的分配区15。
[0059]
该技术设施包括多个无人驾驶运输车5。这些无人驾驶运输车5被设计为自主行驶车辆并且用于将物体、尤其是集装箱运输到技术设施和从技术设施运走。
[0060]
这些无人驾驶运输车5分别包括用于在平地上移动的驱动装置。驱动装置包括驱
动轮、多个用于驱动这些驱动轮的电机以及用于为电机供给电能的蓄电器。这些无人驾驶运输车5还分别包括用于控制驱动装置的控制单元和用于与中央服务器进行无线通信以及与其他无人驾驶运输车5进行无线通信的通信单元。
[0061]
无人驾驶运输车5将尤其装有原料的集装箱运送到供料区14。无人驾驶运输车5还将空集装箱从供料区14运送到装运区17。此外,无人驾驶运输车5还将装有产品的集装箱从装运区17运走。
[0062]
所述制造区1、2、3、4中的每个制造区都具有进料站11和移交站13。进料站11用于停放在其上装有原料的托盘。移交站13用于停放容纳所制成的产品的托盘。原料被从进料站11上的托盘中取出。在制造区1、2、3、4中,由原料制成产品。所制成的产品被放在移交站13上的托盘上。
[0063]
分配区15具有第二运输机器人1504。第二运输机器人1504将位于供料区14中的在其上装有原料的托盘运送到制造区1、2、3、4的进料站11。第二运输机器人1504还将位于制造区1、2、3、4的移交站13处的、在其上装有产品的托盘运送到清洗区16。
[0064]
分配区15具有物料缓冲区1503。如果制造区1、2、3、4的进料站11 仍被其他托盘占用,则第二运输机器人1504先将在其上装有原料的托盘停放在物料缓冲区1503上。当进料站11再次空闲时,第二运输机器人1504 将等待在物料缓冲区1503上的托盘运送到制造区1、2、3、4的进料站11。
[0065]
分配区15具有产品缓冲区1501。如果清洗区16超载,则第二运输机器人1504先将在其上装有产品的托盘停放在产品缓冲区1501上。当清洗区16又可用时,第二运输机器人1504将等待在产品缓冲区1501上的托盘运送到清洗区16。
[0066]
当位于制造区1、2、3、4的进料站11上的托盘空了时,第二运输机器人1504将在其上装有产品的托盘从制造区1、2、3、4的移交站13运走。然后第二运输机器人1504将位于制造区1、2、3、4的进料站11处的空托盘运送到制造区1、2、3、4的移交站13。
[0067]
分配区15还具有存放站1505。存放站1505尤其用于接纳来自装运区 17的空托盘。第二运输机器人1504将位于存放站1505处的空托盘运送到供料区14。
[0068]
图2示出该技术设施的供料区14的示意图。该供料区14具有多个物料站1404。无人驾驶运输车5将装有原料的集装箱运送到供料区14的物料站1404。供料区14还具有停车区1408,当前在该停车区处停放有无人驾驶运输车5。停车区1408具有用于对停放的无人驾驶运输车5的蓄电器进行充电的充电装置。
[0069]
供料区14还具有码垛站1402,当前在该码垛站处放置有托盘。供料区14具有第一运输机器人1403。第一运输机器人1403从位于物料站1404 之一处的集装箱中取出原料并将原料放在位于码垛站1402处的托盘上。
[0070]
分配区15的第二运输机器人1504将位于码垛站1402处的、在其上装有原料的托盘运送到制造区1、2、3、4的进料站11。
[0071]
供料区14具有码垛缓冲区1405。如果可用的原料的量不足,则第一运输机器人1403将码垛站1402上的托盘运送到码垛缓冲区1405。当原料又可用时,第一运输机器人1403将码垛缓冲区1405上的托盘运送到码垛站1402。
[0072]
供料区14具有摄像机1406,该摄像机当前被设计为3d摄像机。摄像机1406检测位于物料站1404之一处的集装箱中的原料。在此,摄像机1406 尤其识别位于集装箱中的原料
的数量、大小和形状。
[0073]
供料区14具有收集站1407,当前在该收集站处放置有集装箱。第一运输机器人1403从位于物料站1404之一处的集装箱中取出分隔层并将分隔层放在位于收集站1407处的集装箱中。如果位于收集站1407处的集装箱满了,则无人驾驶运输车5将该集装箱从收集站1407运走,无人驾驶运输车5将空的集装箱运送到收集站1407。
[0074]
图3示出技术设施的清洗区16和装运区17的示意图。清洗区16具有输入站1603。分配区15的第二运输机器人1504将位于制造区1、2、3、4 之一的移交站13处的、在其上装有产品的托盘运送到清洗区16的输入站 1603。
[0075]
清洗区16具有清洗站1601、输送机1602和打包站1604。输送机1602 将位于输入站1603处的、在其上装有产品的托盘运送到清洗站1601。托盘上的产品在清洗站1601中被清洗。输送机1602将位于清洗站1601处的、在其上装有洗好的产品的托盘运送到打包站1604。
[0076]
装运区17具有第三运输机器人1608。装运区17还具有多个集装箱站 1605。第三运输机器人1608从位于打包站1604处的托盘中取出产品并将产品放在位于集装箱站1605之一处的集装箱中。
[0077]
无人驾驶运输车5将空集装箱从供料区14的物料站1404运送到集装箱站1605。无人驾驶运输车5还将装有产品的集装箱从集装箱站1605运走。
[0078]
装运区17具有填充站1701,当前在该填充站处放置有集装箱。第三运输机器人1608从位于填充站1701处的集装箱中取出填充物并将填充物放在位于集装箱站1605之一处的集装箱中。当填充站1701处的集装箱空了时,无人驾驶运输车5将该集装箱从填充站1701运走,无人驾驶运输车 5将填有填充物的集装箱运送到填充站1701。
[0079]
装运区17具有打印机1606。打印机1606生成用于标记在集装箱站 1605中被装有产品的集装箱的标签。第三运输机器人1608将通过打印机 1606生成的标签固定到集装箱站1605处的被装有产品的集装箱上。
[0080]
当第三运输机器人1608从位于打包站1604处的托盘上取出全部产品后,第三运输机器人1608将位于打包站1604处的空托盘运送到分配区15 的存放站1505。然后第二运输机器人1504将位于存放站1505处的空托盘运送到供料区14的码垛站1402。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1