一种机器人物料运输智能设备的制作方法
1.本实用新型属于食品加工设备领域,具体涉及一种机器人物料运输智能设备。
背景技术:
2.在科技变革浪潮中,机器人产业成为各国关注与竞争角逐的焦点。当前,我国工业正处于转型升级阶段,需要提质增效,同时随着劳动力成本不断上涨,工业领域“机器换人”现象普遍,工业机器人市场与产业也因此逐渐发展起来。在高成本劳动力施压下,利用工业机器人转型智能制造成为发展趋势,也是中国制造业的重大战略之一。
3.如今茶丝生产工艺方式为全部采用人工制作,人工成本高,效率低下,品质不稳定,所以很多企业逐步开发了自动化的茶叶加工设备。现有公告号为cn113826730a的中国发明,公开了一种用于绿茶的全自动茶叶生产制造设备及其使用方法,具体涉及绿茶生产设备技术领域,包括安装在茶叶生产车间的第一安装架和第二安装架,所述第一安装架的顶部设置有揉捻挑选机构,所述第二安装架的顶部设置有传送晾晒机构,所述传送晾晒机构的底部一侧设置有传送包装机构。本发明通过各个结构相应配合使用,不仅降低了茶叶生产所需的整体时间,同时还能有效的提高茶叶生产效率,更进一步的减少了人工成本的消耗,同时设备在使用的同时,能够对茶叶内混杂的残次品进行分离,增加茶叶后续生产的质量,满足大量的茶叶生产需求量。该专利文件主要针对茶叶的揉捻和烘干工序做出改进,提高茶叶成品的质量,其采用传送装置进行物料的输送,对于茶叶的整套加工流程并没有显著的提高支制作效率,自动化程度低。
4.因此,针对上述茶叶生产全部采用人工制作效率低下的情况,开发一种机器人集成智能设备,利用机器人自动化作业,生产出合格产品,达到智能制造的目的。
技术实现要素:
5.(1)要解决的技术问题
6.针对现有技术的不足,本实用新型的目的在于提供一种机器人物料运输智能设备,该机器人物料运输智能设备旨在解决现在的人工生产茶丝存在人工成本高、技术工招工难、生产车间标准高、品质不稳定的技术问题。
7.(2)技术方案
8.为了解决上述技术问题,本实用新型提供了这样一种机器人物料运输智能设备,该机器人物料运输智能设备包括自左向右平面依次布置的一次微波烘干间、一次蒸箱间、二次微波烘干间、二次蒸箱间、干燥间,所述一次微波烘干间与所述一次蒸箱间之间设置有一次过渡机构和前置机器人,所述一次蒸箱间与所述二次微波烘干间之间设置有另一所述前置机器人,所述二次微波烘干间与所述二次蒸箱间之间设置有与一次过渡机构结构相同的二次过渡机构和与前置机器人结构相同的后置机器人。
9.使用本技术方案的一种机器人物料运输智能设备时,茶丝通过一次微波烘干间进行第一次微波干燥抽干茶丝表面水分、一次蒸箱间抽干茶丝的内部水分、二次微波烘干间
和二次蒸箱间进一步干燥,最后通过干燥间进行热泵烘干,在各工序之间通过一次过渡机构和前置机器人相互配合,二次过渡机构和后置机器人相互配合,连续周转运输。
10.优选的,所述一次蒸箱间设置有多个沿轨道行走的一级agv小车,所述一次蒸箱间内左右对称设置有两处一号托盘消毒库,所述一次蒸箱间内侧设置有三组初级蒸箱室,所述一级agv小车的行走轨道连接于所述前置机器人、所述一号托盘消毒库和所述初级蒸箱室之间。一级agv小车将轻量化托盘从一号托盘消毒库内取出,送到一次过渡机构用于接收茶丝,然后前置机器人将装满茶丝的轻量化托盘放回一级agv小车,一级agv小车再将装满茶丝的轻量化托盘送入初级蒸箱室。
11.优选的,所述二次蒸箱间左右对称设置有两处二号托盘消毒库,所述二次蒸箱间设置有多个沿轨道行走的二级agv小车,所述二次蒸箱间内侧设置有三组次级蒸箱室,所述二级agv小车的行走轨道连接于所述后置机器人、所述二号托盘消毒库和所述次级蒸箱室之间。二级agv小车将轻量化托盘从二号托盘消毒库内取出,送到二次过渡机构用于接收茶丝,然后后置机器人将装满茶丝的轻量化托盘放回二级agv小车,二级agv小车再将装满茶丝的轻量化托盘送入次级蒸箱室。
12.优选的,所述一次过渡机构和所述二次过渡机构均包括:上输送带、安装于所述上输送带上端的刮平机构、平行设置于所述上输送带下方的下输送带、设置于所述上输送带和所述下输送带一端的提升机构。上输送带用于输送茶丝,下输送带用于输送空的轻量化托盘,提升机构将装满茶丝的轻量化托盘竖向抬升,方便取送。
13.优选的,所述上输送带两侧设置有茶叶护板,所述刮平机构内水平设置有垂直于上输送带运料方向的导杆,所述导杆一端安装有水平气缸,所述导杆另一端活动连接有刮板,所述刮板连接于所述水平气缸的输出轴上。水平气缸推动刮板沿导杆水平移动,经过上输送带表面,将隆起的茶丝推平,防止茶丝滑落到设备外部。
14.优选的,所述下输送带一端设置有接盘输送带,所述下输送带和所述接盘输送带两侧均设置有托盘护板,所述所述下输送带和所述接盘输送带上设置有连续排布的轻量化托盘。托盘护板用于给轻量化托盘定位,令其沿下输送带定向输送,防止发生水平偏移,导致无法顺利盛装茶丝和提升。
15.优选的,所述提升机构包括:机架、安装于所述机架一侧的传动电机、安装于所述机架四角的同步轮,所述同步轮之间连接有竖向传动的同步带,所述同步带外侧连接有托架。传动电机控制同步轮带动同步带上下传动,使托架跟随同步带垂直升降,托架与轻量化托盘底部之间存在卡托结构,将轻量化托盘顶起。
16.优选的,所述前置机器人和所述后置机器人朝向所述提升机构一侧设置有抓手机构,所述抓手机构平行于所述轻量化托盘,所述抓手机构包括翻转电机和连接于所述翻转电机的输出轴上的锁扣件。翻转电机控制锁扣件进行圆周运动,令与锁扣件螺栓连接的支架翻转一百八十度,用于倾倒茶丝。
17.优选的,所述锁扣件内侧通过螺栓连接有矩形支架,所述支架上端两侧对称分布有上吸盘,所述上吸盘用于吸附于所述轻量化托盘的下表面。抓手机构将支架伸入提升机构,令其处于轻量化托盘的下方,利用上吸盘吸附固定轻量化托盘,然后将其移动到一级agv小车和二级agv小车上。
18.优选的,所述支架内壁两侧安装有旋转气缸,所述旋转气缸的输出轴上安装有下
吸盘,所述下吸盘用于吸附于所述轻量化托盘的上表面。抓手机构将支架移动到一级agv小车和二级agv小车上,通过下吸盘吸附轻量化托盘的上表面,将其移动到加工车间的输入端,通过旋转气缸驱动下吸盘倾斜转动,令轻量化托盘发生偏斜,将茶丝倒出。
19.(3)有益效果
20.与现有技术相比,本实用新型的有益效果在于:本实用新型的一种机器人物料运输智能设备采用过渡机构和机器人相互配合作业,快速的将茶丝在各个生产车间内周转,代替人工实现生产物料转运、专机上下料,达到了机器人智能制造生产、无人化车间的目标,优化生产车间的平面布置结构,有利于安全生产,令茶叶的生产过程更加洁净和高效,大大降低人工成本,也提高了茶叶的食品安全标准。
附图说明
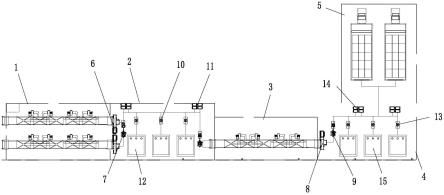
21.图1为本实用新型一种机器人物料运输智能设备具体实施方式的平面布置结构示意图;
22.图2为本实用新型一种机器人物料运输智能设备具体实施方式的过渡机构结构示意图;
23.图3为本实用新型一种机器人物料运输智能设备具体实施方式的机器人结构示意图;
24.图4为本实用新型一种机器人物料运输智能设备具体实施方式的抓手机构结构示意图。
25.附图中的标记为:1、一次微波烘干间;2、一次蒸箱间;3、二次微波烘干间;4、二次蒸箱间;5、干燥间;6、一次过渡机构;7、前置机器人;8、二次过渡机构;9、后置机器人;10、一级agv小车;11、一号托盘消毒库;12、初级蒸箱室;13、二号托盘消毒库;14、二级agv小车;15、次级蒸箱室;16、上输送带;17、茶叶护板;18、刮平机构;19、导杆;20、水平气缸;21、刮板;22、接盘输送带;23、下输送带;24、托盘护板;25、轻量化托盘;26、提升机构;27、机架;28、传动电机;29、同步轮;30、同步带;31、托架;32、抓手机构;33、翻转电机;34、锁扣件;35、支架;36、上吸盘;37、旋转气缸;38、下吸盘。
具体实施方式
26.本具体实施方式是用于一种机器人物料运输智能设备,其平面布置结构示意图如图1所示,过渡机构结构示意图如图2所示,机器人结构示意图如图3所示,抓手机构32结构示意图如图4所示,该机器人物料运输智能设备包括自左向右平面依次布置的一次微波烘干间1、一次蒸箱间2、二次微波烘干间3、二次蒸箱间4、干燥间5,一次微波烘干间1与一次蒸箱间2之间设置有一次过渡机构6和前置机器人7,一次蒸箱间2与二次微波烘干间3之间设置有另一前置机器人7,二次微波烘干间3与二次蒸箱间4之间设置有与一次过渡机构6结构相同的二次过渡机构8和与前置机器人7结构相同的后置机器人9。
27.针对本具体实施方式,上吸盘36和下吸盘38分别由不同的泵吸系统控制,上吸盘36用于在提升机构26使用,动底部托住轻量化托盘25,下吸盘38从一级agv小车10和二级agv小车14上用于从顶部取出装满物料的轻量化托盘25,方便轻量化托盘25快速且稳定的移动,旋转气缸37本身可以令下吸盘38旋转一定角度,用于翻转轻量化托盘25倒料,当茶丝
无法倒净时,通过翻转电机33翻转支架35,令轻量化托盘25直接翻转一百八十度,令茶丝全部倒出。
28.其中,一次蒸箱间2设置有多个沿轨道行走的一级agv小车10,一次蒸箱间2内左右对称设置有两处一号托盘消毒库11,一次蒸箱间2内侧设置有三组初级蒸箱室12,一级agv小车10的行走轨道连接于前置机器人7、一号托盘消毒库11和初级蒸箱室12之间,二次蒸箱间4左右对称设置有两处二号托盘消毒库13,二次蒸箱间4设置有多个沿轨道行走的二级agv小车14,二次蒸箱间4内侧设置有三组次级蒸箱室15,二级agv小车14的行走轨道连接于后置机器人9、二号托盘消毒库13和次级蒸箱室15之间。一级agv小车10将轻量化托盘25从一号托盘消毒库11内取出,送到一次过渡机构6用于接收茶丝,然后前置机器人7将装满茶丝的轻量化托盘25放回一级agv小车10,一级agv小车10再将装满茶丝的轻量化托盘25送入初级蒸箱室12,二级agv小车14将轻量化托盘25从二号托盘消毒库13内取出,送到二次过渡机构8用于接收茶丝,然后后置机器人9将装满茶丝的轻量化托盘25放回二级agv小车14,二级agv小车14再将装满茶丝的轻量化托盘25送入次级蒸箱室15。
29.同时,一次过渡机构6和二次过渡机构8均包括:上输送带16、安装于上输送带16上端的刮平机构18、平行设置于上输送带16下方的下输送带23、设置于上输送带16和下输送带23一端的提升机构26,上输送带16两侧设置有茶叶护板17,刮平机构18内水平设置有垂直于上输送带16运料方向的导杆19,导杆19一端安装有水平气缸20,导杆19另一端活动连接有刮板21,刮板21连接于水平气缸20的输出轴上,下输送带23一端设置有接盘输送带22,下输送带23和接盘输送带22两侧均设置有托盘护板24,下输送带23和接盘输送带22上设置有连续排布的轻量化托盘25,提升机构26包括:机架27、安装于机架27一侧的传动电机28、安装于机架27四角的同步轮29,同步轮29之间连接有竖向传动的同步带30,同步带30外侧连接有托架31。上输送带16用于输送茶丝,下输送带23用于输送空的轻量化托盘25,提升机构26将装满茶丝的轻量化托盘25竖向抬升,方便取送,水平气缸20推动刮板21沿导杆19水平移动,经过上输送带16表面,将隆起的茶丝推平,防止茶丝滑落到设备外部,托盘护板24用于给轻量化托盘25定位,令其沿下输送带23定向输送,防止发生水平偏移,导致无法顺利盛装茶丝和提升,传动电机28控制同步轮29带动同步带30上下传动,使托架31跟随同步带30垂直升降,托架31与轻量化托盘25底部之间存在卡托结构,将轻量化托盘25顶起。
30.另外,前置机器人7和后置机器人9朝向提升机构26一侧设置有抓手机构32,抓手机构32平行于轻量化托盘25,抓手机构32包括翻转电机33和连接于翻转电机33的输出轴上的锁扣件34,锁扣件34内侧通过螺栓连接有矩形支架35,支架35上端两侧对称分布有上吸盘36,上吸盘36用于吸附于轻量化托盘25的下表面,支架35内壁两侧安装有旋转气缸37,旋转气缸37的输出轴上安装有下吸盘38,下吸盘38用于吸附于轻量化托盘25的上表面。翻转电机33控制锁扣件34进行圆周运动,令与锁扣件34螺栓连接的支架35翻转一百八十度,用于倾倒茶丝,抓手机构32将支架35伸入提升机构26,令其处于轻量化托盘25的下方,利用上吸盘36吸附固定轻量化托盘25,然后将其移动到一级agv小车10和二级agv小车14上,抓手机构32将支架35移动到一级agv小车10和二级agv小车14上,通过下吸盘38吸附轻量化托盘25的上表面,将其移动到加工车间的输入端,通过旋转气缸37驱动下吸盘38倾斜转动,令轻量化托盘25发生偏斜,将茶丝倒出。
31.使用本技术方案的一种机器人物料运输智能设备时,茶丝物料在一次微波烘干间
1干燥后,通过输送机构落入一次过渡机构6,然后一级agv小车10从一号托盘消毒库11内取出经过消毒处理的轻量化托盘25送入一次过渡机构6,刮平机构18通过水平气缸20带动刮板21将茶丝抹平,茶丝通过上输送带16运送到由下输送带23传输的轻量化托盘25内,然后提升机构26通过传动电机28控制同步带30传动,使托架31垂直上升,托架31与轻量化托盘25底部之间存在卡托结构,将轻量化托盘25顶起,然后前置机器人7通过抓手机构32对装满的轻量化托盘25进行抓取,上吸盘36用于托住轻量化托盘25底部,并转运放置在空的一级agv小车10上,一级agv小车10把带有茶丝的轻量化托盘25送入一次蒸箱间2,一次蒸完成后,也是由一级agv小车10转运到二次微波烘干间3的附近的另一前置机器人7处,前置机器人7通过抓手机构32的下吸盘38把一级agv小车10送来的带茶丝的轻量化托盘25抓取,然后通过翻转电机33控制支架35翻转一百八十度,将茶丝倒入二次微波烘干间3输入端,同理,沿用上述操作方式,二次微波烘干间3,二次蒸箱间4,干燥间5之间的物料运输衔接也是通过相同结构的二次过渡机构8、后置机器人9和二级agv小车14配合工作完成,最终从干燥间5取出完全干燥后的茶丝成品。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1