定位装置及模具的制作方法
1.本技术涉及注塑领域,具体为一种定位装置及模具。
背景技术:
2.目前在笔记本电脑产品的内嵌注塑中,需要先定位金属板,再注塑树脂至金属板上,使树脂与金属连接在一起。但金属板经常存在尺寸误差,传统模具的定位结构无法适应金属板的尺寸误差变化,例如在误差偏小时,金属板与定位结构之间就存在间隙,注塑成型时在注射压力下会导致成型件变形;而在误差偏大时,模具合模过程中,金属板会在定位压力作用下而变形,最终导致注塑效率及质量低下的问题。
技术实现要素:
3.有鉴于此,有必要提供一种能够根据金属板的尺寸误差变化而变化的定位装置及具有该定位装置的模具,旨在提升注塑效率及质量。
4.本技术一实施例中提供一种定位装置,包括承载台、抵推件、限位件、第一驱动组件、第二驱动组件及控制组件。承载台具有定位面。抵推件具有第一斜面。限位件位于抵推件背离定位面的一侧,限位件具有第二斜面,第二斜面与第一斜面平行。第一驱动组件用于驱动抵推件沿水平方向移动,以使抵推件抵推工件至定位面。第二驱动组件用于驱动限位件沿竖直方向移动,以使第二斜面接触第一斜面。控制组件用于在工件接触定位面后控制第一驱动组件固定抵推件的位置,并在第二斜面接触第一斜面后控制第二驱动组件固定限位件的位置,以使限位件对抵推件限位。
5.上述定位装置通过控制组件先控制第一驱动组件驱动抵推件抵推工件至定位面,在工件接触定位面后固定抵推件的位置,接着控制第二驱动组件驱动限位件移动,直至第二斜面接触第一斜面后,固定限位件的位置,以使限位件卡住抵推件的位置,进而实现了定位装置能够根据工件的尺寸误差变化而变化的目的,避免了工件因尺寸偏小而固定不牢,或因尺寸偏大而导致变形的问题。
6.在一些实施例中,定位面上具有第一接触传感器,第一接触传感器通讯连接控制组件,并用于感测定位面与工件的接触。
7.在一些实施例中,第二驱动组件包括第二接触传感器及驱动器,驱动器通过第二接触传感器连接限位件,第二接触传感器用于感测第二斜面与第一斜面的接触,驱动器用于驱动限位件移动。
8.在一些实施例中,第二驱动组件还包括导向柱、移动架、滑轨及固定架,滑轨及驱动器设于固定架,滑轨沿竖直方向延伸,移动架滑动连接于滑轨,驱动器驱动移动架沿滑轨移动,导向柱顶部穿过移动架,底部连接限位件,第二接触传感器连接于移动架与限位件之间。
9.在一些实施例中,第二驱动组件还包括丝杆、升降块及联轴器,丝杆竖直设置且两端转动连接于固定架,丝杆螺纹穿过升降块,升降块连接移动架,丝杆一端通过联轴器连接
驱动器,驱动器驱动丝杆转动并带动升降块升降。
10.在一些实施例中,第一斜面及第二斜面与竖直面之间的夹角小于5度。
11.在一些实施例中,移动架设有插片,固定架沿竖直方向排列设有多个光电传感器,插片能够插入每个光电传感器中,以使光电传感器感测移动架的位置。
12.在一些实施例中,承载台具有两个定位面,两个定位面相垂直,每个定位面的对侧设有一个抵推件及一个限位件。
13.在一些实施例中,第一驱动组件包括气缸,气缸的驱动端连接抵推件。
14.本技术一实施例中还提供一种模具,包括上模、下模及上述任一实施例中的定位装置,承载台及抵推件位于上模及下模之间,限位件穿过上模,第一驱动组件及第二驱动组件位于上模及下模外部。
15.上述模具通过定位装置同样实现了根据工件的尺寸误差变化而变化的目的,进而提升了注塑效率及质量。
附图说明
16.图1为本技术一实施例中定位装置的立体图。
17.图2为图1中定位装置沿i|-ii的剖视图。
18.图3为图1中第一驱动组件、第二驱动组件、抵推件及限位件的立体图。
19.图4为图3中第二驱动组件及限位件的分解图。
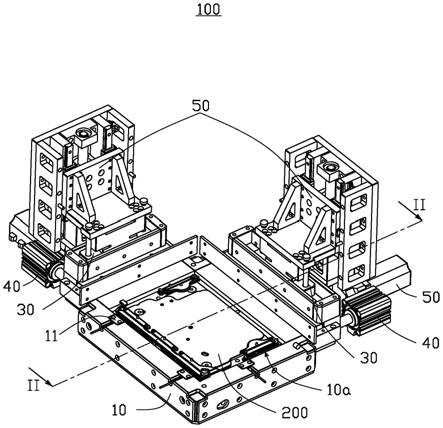
20.图5为本技术一实施例中模具的立体图。
21.图6为图5中模具另一视角的立体图。
22.图7为图5中模具沿vii-vii的剖视图。
23.主要元件符号说明
24.定位装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
25.工件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200
26.承载台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
27.定位面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10a
28.第一接触传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
29.抵推件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20
30.第一斜面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21
31.限位件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30
32.第二斜面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31
33.第一驱动组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40
34.第二驱动组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
50
35.第二接触传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
51
36.驱动器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
52
37.导向柱
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
53
38.移动架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
54
39.插片
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
54a
40.滑轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
55
41.固定架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
56
42.光电传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
56a
43.丝杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
57
44.升降块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
58
45.联轴器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
59
46.模具
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
300
47.上模
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
310
48.下模
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
320
具体实施方式
49.下面将结合本技术实施方式中的附图,对本技术的技术方案进行描述,显然,所描述的实施方式仅仅是本技术一部分实施方式,而不是全部的实施方式。
50.需要说明的是,当组件被称为
″
固定于
″
另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是
″
连接
″
另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是
″
设置于
″
另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语
″
垂直的
″
、
″
水平的
″
、
″
左
″
、
″
右
″
以及类似的表述只是为了说明的目的。
51.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本技术。本文所使用的术语
″
或/及
″
包括一个或多个相关的所列项目的任意的和所有的组合。
52.下面结合附图,对本技术的一些实施方式作详细说明。在不冲突的情况下,下述的实施方式及实施方式中的特征可以相互组合。
53.请参阅图1至图3,本技术一实施例中提供一种定位装置100,用于定位工件200。定位装置100包括承载台10、抵推件20、限位件30、第一驱动组件40及第二驱动组件50。承载台10水平放置并具有定位面10a。定位面10a用于接触工件200的侧壁以定位工件200。抵推件20连接于第一驱动组件40的驱动端。第一驱动组件40能够驱动抵推件20沿水平方向移动。抵推件20移动后能够抵推工件200移动,以使工件200接触至定位面10a上。限位件30位于抵推件20背离定位面10a的一侧,并连接于第二驱动组件50的驱动端。第二驱动组件50能够驱动限位件30沿竖直方向移动。限位件30移动后能够接触抵推件20,并对抵推件20起到限位作用,即限位件30能够将抵推件20的位置卡在工件200与限位件30之间,使得抵推件20无法朝远离工件200的方向移动,进而保证工件200的定位牢固。
54.作为示范性举例,定位装置100可以用于内嵌注塑的模具中(如图7),工件200为金属件(如铝板),定位装置100定位工件200后,模具合模并在工件200上注塑树脂以形成金属树脂一体式部件。由于注塑过程中注射压力较大,导致注射的树脂会对工件200沿水平方向施力(例如约14200kgf),该力由工件200传递至抵推件20,而抵推件20在限位件30的限位作用下能够承受该力,防止工件200发生错位或晃动,进而保证注塑质量。可以理解的是,在其他实施例中,定位装置100也可以用于其他加工工艺中,如焊接或组装等。
55.在一些实施例中,由于工件200的尺寸存在加工误差,故抵推件20及限位件30的位
置需要随工件200的尺寸变化而变化。如图2所示,抵推件20背离定位面10a的一侧具有第一斜面21。限位件30朝向抵推件20的一侧具有第二斜面31。第二斜面31与第一斜面21平行。抵推件20与限位件30之间通过第一斜面21及第二斜面31相接触。当工件200的尺寸存在误差(偏大或偏小)时,抵推件20将工件200抵推至定位面10a所需移动的行程也会随之变化,而由于第一斜面21及第二斜面31的结构,能够使抵推件20的沿水平方向的行程变化转化成限位件30沿竖直方向的形成变化,例如当工件200的尺寸偏大时,抵推件20及限位件30的移动行程会变小,而当工件200的尺寸偏小时,抵推件20及限位件30的移动行程会变大。同时,由于第一斜面21及第二斜面31的结构,使得注塑时工件200(或注塑树脂)沿水平方向传递至抵推件20的力能够转化为限位件30沿竖直方向的压力,且可以理解的是,第一斜面21及第二斜面31的倾斜度越大,传递至限位件30上的力就越小。作为示范性举例,第一斜面21及第二斜面31与竖直面之间的夹角w小于5度,优选为2度。若夹角w为2度,当工件200受力为14200kgf时,传递至限位件30上的力仅为14200kgf*tan2
°
=495.9kgf,即第一斜面21及第二斜面31的结构能够轻易承受工件200收到的巨大水平力。同时,当工件200的尺寸误差为
±
0.2mm时,限位件30的移动行程变化约为
±
0.2mm/tan2
°
=
±
5.73mm,即第一斜面21及第二斜面31的结构能够放大因工件200的尺寸误差导致的限位件30移动行程变化,进而降低了限位件30的移动控制精度,以便于操控限位件30的移动。
56.在一些实施例中,为了精准控制抵推件20及限位件30的移动行程,防止抵推件20及限位件30过度移动或移动不到位,定位装置100还包括控制组件(图未示)。定位时,控制组件先控制第一驱动组件40驱动抵推件20抵推工件200至定位面10a上,在工件200接触定位面10a后控制第一驱动组件40固定抵推件20的位置,接着,控制组件再控制第二驱动组件50驱动限位件30移动,直至第二斜面31接触第一斜面21后,控制第二驱动组件50固定限位件30的位置,以使限位件30对抵推件20限位。
57.进一步地,如图1所示,在一些实施例中,定位面10a上具有第一接触传感器11。第一接触传感器11通讯连接控制组件,并用于感测定位面10a与工件200的接触。当第一接触传感器11检测到工件200接触定位面10a后,控制组件控制第一驱动组件40固定抵推件20的位置。作为示范性举例,第一接触传感器11可以为触碰式传感器或金属感测器等;第一驱动组件40包括气缸,气缸的驱动端连接抵推件20。
58.同理,如图3或图4所示,在一些实施例中,第二驱动组件50包括第二接触传感器51及驱动器52。驱动器52用于驱动限位件30移动。驱动器52通过第二接触传感器51连接限位件30。第二接触传感器51通讯连接控制组件。第二接触传感器51用于感测第二斜面31与第一斜面21的接触。当第二接触传感器51感测到第二斜面31与第一斜面21接触后,控制组件控制第二驱动组件50固定限位件30的位置。作为示范性举例,第二接触传感器51可以为压力传感器等。
59.请参阅图3及图4,在一些实施例中,第二驱动组件50还包括导向柱53、移动架54、滑轨55及固定架56。固定架56位置固定。滑轨55及驱动器52设于固定架56上。滑轨55沿竖直方向延伸。移动架54滑动连接于滑轨55。驱动器52能够驱动移动架54沿滑轨55滑动。导向柱53顶部滑动穿过移动架54,底部连接限位件30。第二接触传感器51连接于移动架54与限位件30之间。定位时,驱动器52驱动移动架54沿滑轨55向下滑动,移动架54带动第二接触传感器51及限位件30向下移动,直至限位件30接触抵推件20时,由于第二接触传感器51收到挤
压,限位件30会相对移动架54具有微小移动,导向柱53用于对限位件30的移动导向。
60.进一步地,在一些实施例中,第二驱动组件50还包括丝杆57、升降块58及联轴器59。丝杆57竖直设置且两端转动连接于固定架56。丝杆螺纹穿过升降块58。升降块58连接移动架54。丝杆57一端通过联轴器59连接驱动器52。驱动器52通过联轴器59驱动丝杆57转动,丝杆57的转动能够转化成升降块58的升降移动,升降块58用于带动移动架54同步移动。作为示范性举例,驱动器52为伺服电机,以便高精度驱动限位件30移动。
61.请参阅图4,在一些实施例中,移动架54一侧设有插片54a。固定架56沿竖直方向排列设有多个光电传感器56a。插片54a随移动架54同步移动。在移动过程中,插片54a能够逐一插入光电传感器56a中。光电传感器56a通讯连接控制组件,并用于感测移动架54的大致位置,以判断限位件30与抵推件20的大致距离,进而便于控制组件控制驱动器52的转速,例如当光电传感器56a感测到限位件30与抵推件20的距离较远时,控制组件控制驱动器52高速运行以加速,当光电传感器56a感测到限位件30与抵推件20接近时,控制组件控制驱动器52低速运行以保证精度。
62.请参阅图1,在一些实施例中,承载台10具有两个定位面10a,两个定位面10a相垂直设置。每个定位面10a的对侧设有一个抵推件20、一个限位件30及上述对应的结构,以对工件200在水平面内完全定位。
63.请参阅图5至图7,本技术一实施例中还提供一种模具300。模具300包括上模310、下模320及定位装置100。定位装置100的承载台10嵌入下模320顶面。抵推件20位于上模310及下模320之间。限位件30可滑动地穿过上模320。第一驱动组件40及第二驱动组件50位于上模310及下模320外部。模具300用于在工件200上注塑树脂。作为示范性举例,工件200为笔记本电脑的外壳部件。
64.另外,本技术领域的普通技术人员应当认识到,以上的实施方式仅是用来说明本技术,而并非用作为对本技术的限定,只要在本技术的实质精神范围之内,对以上实施例所作的适当改变和变化都落在本技术的公开范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1