一种上取出式机械手的制作方法
1.本实用新型涉及吸塑成型设备技术领域,具体涉及一种上取出式机械手。
背景技术:
2.吸塑成型机又叫热塑成型机,这种成型设备的工艺主要是利用真空泵产生的真空吸力将加热软化后的pvc、pet、petg、aptt、pp、pe、ps等热可塑性塑料片材经过模具吸塑成各种形状的真空罩,或贴附着于各种形状产品的表面。
3.目前,现有的吸塑成型机吸塑加工处理完成后,需通过人工或输送带等简易设备进行下料操作,下料输出后的产品需人工手动堆叠或将工件转移至堆叠机械中进行工件堆叠、包装,缺少配套且适用于吸塑成型机的堆叠装置,严重制约了整体生产效率耗费了的大量的劳动力。
技术实现要素:
4.针对现有技术的不足,本实用新型旨在提供一种适用于吸塑工件的、实现自动化工件堆叠的上取出式机械手。
5.为实现上述目的,本实用新型采用如下技术方案:
6.一种上取出式机械手,包括用于上料的取件机械手、可步进式往前输送堆叠工件的成品输送带以及用于将取件机械手上的工件转移至所述成品输送带上进行堆叠的堆叠机械手,所述取件机械手获取的工件位于其取料端顶面,所述堆叠机械手可从取件机械手取料端顶面抓取工件。
7.进一步地,所述堆叠机械手包括用于抓取工件的堆叠治具、用于驱动所述堆叠治具进行升降运动的升降伺服驱动以及用于驱动所述升降伺服驱动进行水平运动的水平伺服驱动,所述堆叠治具底面设有若干第一吸盘。
8.进一步地,所述取件机械手包括用于抓取工件的取件治具、用于驱动所述取件治具进行水平运动的水平驱动机构、用于驱动所述水平驱动机构进行升降运动的升降驱动机构。
9.进一步地,所述取件治具包括由水平驱动机构驱动滑动的安装底板、可更换地安装在所述安装底板上的治具板、以及若干设于治具板顶部的第二吸盘。
10.进一步地,所述水平驱动机构和所述升降驱动机构均为同步带驱动机构。
11.进一步地,所述成品输送带的输送面两侧设有限位挡板。
12.进一步地,所述成品输送带为电机驱动的皮带输送机。
13.进一步地,还包括边料输送带,所述堆叠机械手可将所述取件机械手上的边料转移至所述边料输送带上。
14.进一步地,所述边料输送带的输送方向与所述成品输送带的输送方向垂直。
15.进一步地,所述边料输送带的输送面位于所述取件机械手的上方。
16.本实用新型具有如下有益效果:
17.本实用新型实现了吸塑工件的自动堆叠过程,有效提高了生产自动化进程,节省劳动力;另外,采用上取出式的取件堆叠方式,使得本实用新型可以直接配合输送或抓取下料形式的吸塑机进行使用,具有适用性范围广的特点。
附图说明
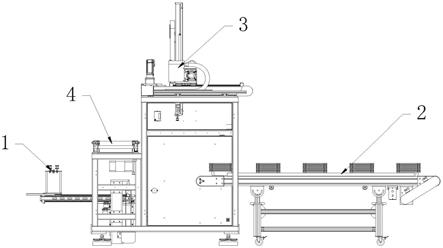
18.图1为本实用新型的正视结构示意图;
19.图2为本实用新型的俯视结构示意图;
20.图3为取件机械手的立体结构示意图;
21.图4为堆叠机械手的正视结构示意图;
22.图5为堆叠机械手的立体结构示意图。
具体实施方式
23.下面结合附图及具体实施例,对本实用新型作进一步的描述,以便于更清楚的理解本实用新型要求保护的技术思想。
24.如图1
‑
5所示本技术实施例提供一种上取出式机械手,包括用于上料的取件机械手1、可步进式往前输送堆叠工件的成品输送带2以及用于将取件机械手1上的工件转移至所述成品输送带2上进行堆叠的堆叠机械手3,所述取件机械手1获取的工件位于其取料端顶面,所述堆叠机械手3可从取件机械手1取料端顶面抓取工件。
25.本技术实施例的一种上取出式机械手用于对吸塑工件进行堆叠,尤其适用于板状工件。
26.本技术实施例使用时配合吸塑设备的下料端配合使用,吸塑设备的下料端可为输送带或机械手,所述取件机械手1的取料端移动至吸塑设备的下料端处,吸塑设备下料端送出吸塑加工完成的吸塑工件,使吸塑工件从上方落入取件机械手1上的取料端上,其后所述取件机械手1抓取固定吸塑工件并将该吸塑工件转移至所述堆叠机械手3的入料处,所述取件机械手1松开该吸塑工件,所述堆叠机械手3位移至吸塑工件上方并抓取吸塑工件,将吸塑工件转移至所述成品输送带2上进行堆叠,当成品输送带2上的吸塑工件堆叠至预设数量时,便往前输送一个区间,腾出下一个堆叠工位便于堆叠机械手3进行下一批的吸塑工件堆叠。
27.值得一提的是,本实用新型还包括控制器,该控制器与取件机械手1、堆叠机械手3、成品输送带2以及吸塑机控制器电性连接,用于控制各部件协调运作。
28.本实用新型利用所述堆叠机械手3进行工件堆叠,可有效确保吸塑工件堆叠整齐到位,利用后续打包处理;同时利用步进式输送的成品输送带2进行工件输送,可配合后续打包设备进行打包,为实现完善的自动化打包线提供基础。
29.优选地,所述堆叠机械手3包括用于抓取工件的堆叠治具31、用于驱动所述堆叠治具31进行升降运动的升降伺服驱动32以及用于驱动所述升降伺服驱动32进行水平运动的水平伺服驱动33,所述堆叠治具31底面设有若干第一吸盘34;所述水平伺服驱动33可驱动升降伺服驱动32上的所述堆叠治具31从所述取件机械手1和成品输送带2上方往复运动;所述升降伺服驱动32可驱动所述堆叠治具31进行升降运动,使得堆叠治具31能靠近取件机械手1的取料端进行吸塑工件的抓取,以及可使堆叠治具31靠近成品输送带2的堆叠位置而平
稳释放吸塑工件,从而确保整个吸塑工件转移、堆叠过程能平稳有序地进行,保证吸塑工件能堆叠整齐、到位。
30.具体地,所述第一吸盘34从吸塑工件顶面进行吸塑工件的吸附固定。
31.在本实施例中,所述第一吸盘34为两个。
32.优选地,所述升降伺服驱动32和水平伺服驱动33为电动直线驱动配件,在本实施例中优选为电动直线滑轨,电动直线滑轨可实现平稳、定点停止的精确控制。
33.优选地,所述取件机械手1包括用于抓取工件的取件治具11、用于驱动所述取件治具11进行水平运动的水平驱动机构12、用于驱动所述水平驱动机构12进行升降运动的升降驱动机构13;所述水平驱动机构12可驱动所述取件治具11进行水平位移,使得取件治具11能从吸塑机下料端与堆叠机械手3的取件端之间往复位移,所述升降驱动机构13用于驱动所述水平驱动机构12进行高度调节,使得所述取件治具11能进行升降运动,从而配合吸塑机的下料端进行吸塑工件的接取,并能将吸塑工件抬升至所述堆叠机械手3能进行吸塑工件抓取的高度。
34.优选地,取件机械手1从吸塑机下料端处取得工件后,所述水平驱动机构12和升降驱动机构13同时运行,使得取件治具11能在较短行程下位移至堆叠机械手3的取件工位,有效提高工作效率。
35.优选地,所述取件治具11包括由水平驱动机构12驱动滑动的安装底板111、可更换地安装在所述安装底板111上的治具板112、以及若干设于治具板112顶部的第二吸盘113。
36.具体地,所述治具板112可按照吸塑工件的形状和尺寸需求进行更换,从而匹配不同类型的吸塑工件进行堆叠使用,使得本实用新型具有更广的适用范围;另外,可通过第二吸盘113固定吸塑工件,防止吸塑工件在取件治具11位移过程中偏移或掉落。
37.在本实施例中,所述第二吸盘113优选为4个,从而可平稳地承托并固定板状的吸塑工件。
38.优选地,所述水平驱动机构12和所述升降驱动机构13均为同步带驱动机构;同步带驱动机构由伺服电机进行驱动,其作为柔性输送设备可确保吸塑工件转移过程平稳。
39.优选地,所述成品输送带2的输送面两侧设有限位挡板21,可避免大型吸塑工件在输送过程中产生位置偏移。
40.优选地,所述成品输送带2为电机驱动的皮带输送机,其中,该电机可以是调速电机或步进电机或伺服电机。
41.优选地,还包括边料输送带4,所述堆叠机械手3可将所述取件机械手1上的边料转移至所述边料输送带4上;吸塑工件生产过程为由塑料片材热吸塑成型再冲切,从而会产生边料;该边料输送带4与控制器电性连接,所述堆叠机械手3抓取边料将边料转移至所述边料输送带4上进行边料下料输送。
42.优选地,所述边料输送带4为皮带输送机。
43.优选地,所述边料输送带4的输送方向与所述成品输送带2的输送方向垂直
44.优选地,所述边料输送带4的输送面位于所述取件机械手1的上方,有效减少设备整体的占用长度,可匹配所述取件机械手1长度进行设计使用。
45.本实用新型实现了吸塑工件的自动堆叠过程,有效提高了生产自动化进程,节省劳动力;另外,采用上取出式的取件堆叠方式,使得本实用新型可以直接配合输送或抓取下
料形式的吸塑机进行使用,具有适用性范围广的特点。
46.对于本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及变形,而所有的这些改变以及变形都应该属于本实用新型权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1