一种用于圆盖塑料成型件抓取的机械臂
1.本实用新型涉及一种用于圆盖塑料成型件抓取的机械臂。
背景技术:
2.注塑成型是将加热至熔融状态的塑料注入型腔中,待冷却固化后形成塑料制品。据发明人了解,国内很多中小型模具企业受规模、资金等限制,自动化水平不高,对于成型的注塑制品(如圆盖塑料成型件)仍以人工取料为主。以传统卧式注塑机为例,工作人员需要取出模具或模件,或者放入嵌件、取出注塑成型的产品时,需要越过导杆,进入大型外式注塑机进行工作,导柱不仅阻挡了工作人员的通道,而且因为导柱的干涉,导致人员及机构因为无足够的空余空间而无法进出机器的锁模区域,致使工作效率低下,增加了危险因素,同时人工成本较高,降低了企业竞争力。
技术实现要素:
3.本实用新型提出一种可提高工作效率和安全性的用于圆盖塑料成型件抓取的机械臂。
4.本实用新型所采用的技术方案为:
5.一种用于圆盖塑料成型件抓取的机械臂,包括底座、用于抓取圆盖塑料成型件的末端抓取机构、用于驱动所述末端抓取机构竖直移动的z轴驱动机构、用于驱动所述z轴驱动机构横向移动的x轴驱动机构和用于驱动所述x轴驱动机构纵向移动的y轴驱动机构,所述y轴驱动机构固定在所述底座上。
6.进一步地,所述末端抓取机构包括第二气缸、第一末端机架、左钳板和右钳板,所述第一末端机架呈倒u形,所述第二气缸固定在所述第一末端机架上端,所述第二气缸的气缸杆向下穿出所述第一末端机架,所述左钳板和所述右钳板各自的中间位置分别铰接在所述第一末端机架左右侧底部,所述左钳板和所述右钳板各自的上端分别通过销轴与所述气缸杆末端铰接,所述第二气缸与所述z轴驱动机构相固定。
7.进一步地,两钳板相对侧为与圆盖塑料成型件适配的弧形结构。
8.进一步地,所述z轴驱动机构包括方形框架和第一气缸,所述方形框架与所述x轴驱动机构相固连,所述第一气缸固定在所述方形框架顶部,所述第一气缸的伸缩杆向下穿过所述方形框架,所述伸缩杆末端与所述第二气缸固定连接。
9.进一步地,所述y轴驱动机构包括第一电机箱和齿条;所述x轴驱动机构包括第二电机箱、同步带、连接板和连接块;
10.所述第一电机箱固定设置在所述底座上,所述第一电机箱内设置有第一电机,所述第一电机的输出轴朝上,输出轴端部固定有第一齿轮;所述第一电机箱顶部设置有两道纵向导轨,所述第二电机箱底部设置有与纵向导轨数量相等且一一对应匹配的纵向槽,所述第二电机箱与所述第一电机箱滑动配合;所述第二电机箱左侧固定有横向连接块,所述横向连接块底部垂直固定有竖向连接杆,所述齿条设置在所述第一电机箱顶部左侧且与所
述第一齿轮啮合,所述竖向连接杆底部与所述齿条顶部固定连接;
11.所述第二电机箱右侧固定有横向导轨,所述连接块左侧一体固定有工字滑块,所述横向导轨上开设有与所述工字滑块相适配的槽,所述工字滑块可横向滑动地设置在所述横向导轨上,所述第一气缸的伸缩杆穿过所述连接块;所述第二电机箱内设置有第二电机,所述第二电机的输出轴朝上,输出轴端部固定有第二齿轮,所述横向导轨顶部右侧固定有可转动的第三齿轮,所述同步带套接在第二、第三齿轮上;所述连接板固定在所述同步带外侧,且所述连接板与所述方形框架固定连接。
12.进一步地,所述末端抓取机构包括第二末端机架和u形板,所述第二末端机架左右侧开槽并设置有微型电机,微型电机输出轴末端固定有第四齿轮,所述u形板两直段外侧设置有与第四齿轮相适配的齿,所述第二末端机架内还开设有供所述u形板上下移动的容置腔;两微型电机驱动所述u形板上下移动,所述第二末端机架与所述z轴驱动机构相固定。
13.进一步地,所述第二末端机架底部中间位置固定有与圆盖塑料成型件相适配的胶垫。
14.进一步地,所述z轴驱动机构包括方形框架和第一气缸,所述方形框架与所述x轴驱动机构相固连,所述第一气缸固定在所述方形框架顶部,所述第一气缸的伸缩杆向下穿过所述方形框架,所述伸缩杆末端与所述第二末端机架固定连接。
15.进一步地,所述y轴驱动机构包括第一电机箱和齿条;所述x轴驱动机构包括第二电机箱、同步带、连接板和连接块;
16.所述第一电机箱固定设置在所述底座上,所述第一电机箱内设置有第一电机,所述第一电机的输出轴朝上,输出轴端部固定有第一齿轮;所述第一电机箱顶部设置有两道纵向导轨,所述第二电机箱底部设置有与纵向导轨数量相等且一一对应匹配的纵向槽,所述第二电机箱与所述第一电机箱滑动配合;所述第二电机箱左侧固定有横向连接块,所述横向连接块底部垂直固定有竖向连接杆,所述齿条设置在所述第一电机箱顶部左侧且与所述第一齿轮啮合,所述竖向连接杆底部与所述齿条顶部固定连接;
17.所述第二电机箱右侧固定有横向导轨,所述连接块左侧一体固定有工字滑块,所述横向导轨上开设有与所述工字滑块相适配的槽,所述工字滑块可横向滑动地设置在所述横向导轨上,所述第一气缸的伸缩杆穿过所述连接块;所述第二电机箱内设置有第二电机,所述第二电机的输出轴朝上,输出轴端部固定有第二齿轮,所述横向导轨顶部右侧固定有可转动的第三齿轮,所述同步带套接在第二、第三齿轮上;所述连接板固定在所述同步带外侧,且所述连接板与所述方形框架固定连接。
18.本实用新型的有益效果是:
19.本实用新型的机械臂可替代人工实现圆盖塑料成型件的抓取,自动化程度高,可提高企业的生产效率和安全性,同时降低人工成本。
附图说明
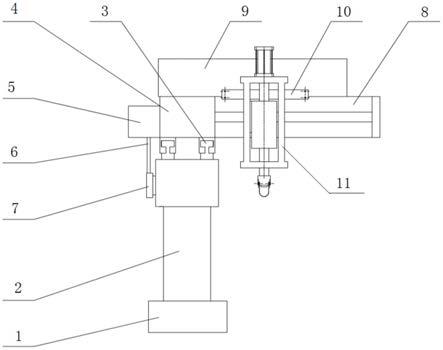
20.图1为机械臂的结构示意图;
21.图2为第一齿轮与齿条的配合结构示意图;
22.图3为z轴驱动机构的结构示意图;
23.图4为图3的左视图;
24.图5为实施例一中,末端抓取机构的结构示意图;
25.图6为同步带的结构示意图;
26.图7为实施例二中,末端抓取机构的结构示意图;
27.图8为图7的侧视图;
28.附图标记:1
‑
底座,2
‑
第一电机箱,3
‑
纵向导轨,4
‑
第二电机箱,5
‑
横向连接块,6
‑
竖向连接杆,7
‑
齿条,8
‑
横向导轨,9
‑
同步带,10
‑
连接板,11
‑
z轴驱动机构,12
‑
第一齿轮,13
‑
方形框架,14
‑
连接块,15
‑
第一气缸,16
‑
第二气缸,17
‑
工字滑块,18
‑
伸缩杆,19
‑
气缸杆,20
‑
第一末端机架,21
‑
左钳板,22
‑
右钳板,23
‑
销轴,24
‑
第二齿轮,25
‑
第三齿轮,26
‑
第二末端机架,27
‑
胶垫,28
‑
u形板,29
‑
微型电机,30
‑
第四齿轮。
具体实施方式
29.下面结合附图和具体的实施例对本实用新型的用于圆盖塑料成型件抓取的机械臂作进一步地详细说明。
30.一种用于圆盖塑料成型件抓取的机械臂,包括底座1、用于抓取圆盖塑料成型件的末端抓取机构、用于驱动末端抓取机构竖直移动的z轴驱动机构11、用于驱动z轴驱动机构11横向移动的x轴驱动机构和用于驱动x轴驱动机构纵向移动的y轴驱动机构,y轴驱动机构固定在底座1上。
31.实施例一
32.如图1至6所示,末端抓取机构包括第二气缸16、第一末端机架20、左钳板21和右钳板22,第一末端机架20呈倒u形,第二气缸16固定在第一末端机架20上端,第二气缸16的气缸杆19向下穿出第一末端机架20,左钳板21和右钳板22各自的中间位置分别铰接在第一末端机架20左右侧底部,左钳板21和右钳板22各自的上端分别通过销轴23与气缸杆19末端铰接,第二气缸16与z轴驱动机构11相固定。本实施中,两钳板相对侧为与圆盖塑料成型件适配的弧形结构。
33.z轴驱动机构11包括方形框架13和第一气缸15,方形框架13与x轴驱动机构相固连,第一气缸15固定在方形框架13顶部,第一气缸15的伸缩杆18向下穿过方形框架13,伸缩杆18末端与第二气缸16固定连接。
34.y轴驱动机构包括第一电机箱2和齿条7。x轴驱动机构包括第二电机箱4、同步带9、连接板10和连接块14。
35.第一电机箱2固定设置在底座1上,第一电机箱2内设置有第一电机,第一电机的输出轴朝上,输出轴端部固定有第一齿轮12。第一电机箱2顶部设置有两道纵向导轨3,第二电机箱4底部设置有与纵向导轨3数量相等且一一对应匹配的纵向槽,第二电机箱4与第一电机箱2滑动配合。第二电机箱4左侧固定有横向连接块5,横向连接块5底部垂直固定有竖向连接杆6,齿条7设置在第一电机箱2顶部左侧且与第一齿轮12啮合,竖向连接杆6底部与齿条7顶部固定连接。
36.第二电机箱4右侧固定有横向导轨8,连接块14左侧一体固定有工字滑块17,横向导轨8上开设有与工字滑块17相适配的槽,工字滑块17可横向滑动地设置在横向导轨8上,第一气缸15的伸缩杆18穿过连接块14。第二电机箱4内设置有第二电机,第二电机的输出轴朝上,输出轴端部固定有第二齿轮24,横向导轨8顶部右侧固定有可转动的第三齿轮25,同
步带9套接在第二、第三齿轮上。连接板10固定在同步带9外侧,且连接板10与方形框架13固定连接。
37.实施例二
38.结合图7和图8,末端抓取机构包括第二末端机架26和u形板28,第二末端机架26左右侧开槽并设置有微型电机29,微型电机29输出轴末端固定有第四齿轮30,u形板28两直段外侧设置有与第四齿轮30相适配的齿,第二末端机架26内还开设有供u形板28上下移动的容置腔。两微型电机29驱动u形板28上下移动,第二末端机架26与z轴驱动机构11相固定。本实施例中,第二末端机架26底部中间位置固定有与圆盖塑料成型件相适配的胶垫27。
39.z轴驱动机构11包括方形框架13和第一气缸15,方形框架13与x轴驱动机构相固连,第一气缸15固定在方形框架13顶部,第一气缸15的伸缩杆18向下穿过方形框架13,伸缩杆18末端与第二末端机架26固定连接。
40.y轴驱动机构包括第一电机箱2和齿条7。x轴驱动机构包括第二电机箱4、同步带9、连接板10和连接块14。
41.第一电机箱2固定设置在底座1上,第一电机箱2内设置有第一电机,第一电机的输出轴朝上,输出轴端部固定有第一齿轮12。第一电机箱2顶部设置有两道纵向导轨3,第二电机箱4底部设置有与纵向导轨3数量相等且一一对应匹配的纵向槽,第二电机箱4与第一电机箱2滑动配合。第二电机箱4左侧固定有横向连接块5,横向连接块5底部垂直固定有竖向连接杆6,齿条7设置在第一电机箱2顶部左侧且与第一齿轮12啮合,竖向连接杆6底部与齿条7顶部固定连接。
42.第二电机箱4右侧固定有横向导轨8,连接块14左侧一体固定有工字滑块17,横向导轨8上开设有与工字滑块17相适配的槽,工字滑块17可横向滑动地设置在横向导轨8上,第一气缸15的伸缩杆18穿过连接块14。第二电机箱4内设置有第二电机,第二电机的输出轴朝上,输出轴端部固定有第二齿轮24,横向导轨8顶部右侧固定有可转动的第三齿轮25,同步带9套接在第二、第三齿轮上。连接板10固定在同步带9外侧,且连接板10与方形框架13固定连接。
43.本实用新型中,分别通过x,y,z轴驱动机构实现三维移动,并可通过两种不同结构形式的末端抓取机构实现圆盖塑料成型件的抓取,实施例一,通过第二气缸16驱动两钳板开合实现。实施例二中,通过两微型电机29驱动u形板28上下移动实现。
44.需要指出的是,本实施例各部件间的连接方式未具体给出,但本领域技术人员可采用公知的如焊接,螺栓连接,粘接等方式完成部件间的固定,因此本技术中不作赘述。
45.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术方法范围内,可轻易想到的替换或变换方法,都应该涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1