一种注塑机的取料机械手的制作方法
1.本实用新型涉及注塑机取料技术领域,具体为一种注塑机的取料机械手。
背景技术:
2.随着工业现代化进程的发展,人工成本越来越高以及越来越多的产品生产采用了自动生产线,自动机械手的出现解决了这一迫在眉睫的问题。
3.现有的市面上的机械手种类很多,样式各异,但是最终的目的都是为了使产品达到我们所需求形状,现有机械手大体分为两种一种占地面积大,设计不巧妙,虽然这些机构能大致满足使用要求,均未能突破传统的结构设计,通常是占地面积大,维修不方便,导致其结构复杂,体积庞大,占用空间大,造成空间资源的浪费;还有一种桁架式机械手其结构简单,不能适应不同形状的模具取料,因此我们提出一种注塑机的取料机械手。
技术实现要素:
4.本实用新型的目的在于提供一种注塑机的取料机械手,解决了背景技术中所提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种注塑机的取料机械手,包括:
6.移动臂,所述移动臂用于支撑并带动垂直夹持机构移动;
7.垂直夹持机构,所述垂直夹持机构包括安装在移动臂驱动端的移动座、对称安装在移动座上的垂直机构、安装在垂直机构移动端的夹持座和安装在夹持座上的吸附盘;
8.气泵组件,所述气泵组件安装在移动臂上,所述气泵组件与吸附盘连通;
9.控制装置,所述控制装置安装在移动臂上,所述控制装置连接至移动臂和垂直夹持机构,用于驱动移动臂和垂直夹持机构的运行和关闭。
10.作为本实用新型所述的一种注塑机的取料机械手的一种优选实时方案,其中,所述移动臂包括平移机构和安装在平移机构移动端的横移机构。
11.作为本实用新型所述的一种注塑机的取料机械手的一种优选实时方案,其中,所述垂直机构、平移机构和横移机构均由轨道壳体、安装在轨道壳体上的行走齿条、与行走齿条啮合连接的伺服电机和与伺服电机固定连接的移动板组成,且所述垂直机构与横移机构的移动板连接,所述横移机构与平移机构的移动板连接。
12.作为本实用新型所述的一种注塑机的取料机械手的一种优选实时方案,其中,每个所述夹持座上均设置有四个吸附盘,所述吸附盘与夹持座螺接。
13.作为本实用新型所述的一种注塑机的取料机械手的一种优选实时方案,其中,两个垂直机构可独立被控制装置控制。
14.作为本实用新型所述的一种注塑机的取料机械手的一种优选实时方案,其中,所述吸附盘包括与夹持座螺接的主体、安装在主体底部的吸盘、设置开设在主体和吸盘中部的吹气孔和设置在吸盘底部并贯穿主体侧壁的吸附孔。
15.作为本实用新型所述的一种注塑机的取料机械手的一种优选实时方案,其中,所述气泵组件包括两个气泵,一个气泵的吸气端与吸附孔连通,另一个气泵的出气端与吹气孔连通。
16.与现有技术相比,本实用新型的有益效果如下:通过移动臂驱动垂直夹持机构进行夹持操作,此时气泵组件产生负压辅助吸附盘进行吸附夹持,通过可独立控制的垂直夹持组件的设置,有利于应对不同形状的物料表面,或者较小面积的物料夹持;在进行吸附夹持的时候,通过气泵对吹气孔吹气,即可对物料表面进行吹气,将物料表面杂物灰尘吹干净,接着通过另一个气泵产生负压,此时吸附孔产生负压将物料表面吸附,进而可实现避免杂物,灰尘影响机械手的使用夹持。
附图说明
17.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
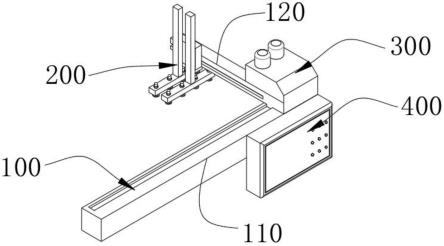
18.图1为本实用新型的立体安装图一;
19.图2为本实用新型的立体安装图二;
20.图3为本实用新型的a处结构放大图;
21.图4为本实用新型的吸附盘结构图。
22.图中:100、移动组件,110、平移机构,120、横移机构,200、垂直夹持机构,210、移动座,220、垂直机构,230、夹持座,240、吸附盘,241、主体,242、吸盘,243、吹气孔,244、吸附孔。
具体实施方式
23.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
24.本实用新型提供一种注塑机的取料机械手,通过可独立控制的垂直夹持组件的设置,有利于应对不同形状的物料表面,或者较小面积的物料夹持。
25.图1-图4展示出的是本实用新型一种注塑机的取料机械手实施方式的结构示意图,请参阅图1-图2,本实施方式的一种注塑机的取料机械手,其主体241部分包括移动臂100、垂直夹持机构200、气泵组件300和控制装置400。
26.移动臂100用于支撑并带动垂直夹持机构200移动,具体的,所述移动臂100包括平移机构110和安装在平移机构110移动端的横移机构120,使用时,壳通过平移机构110和横移机构120驱动垂直加持机构横向和总线,增加装置可调节性;
27.垂直夹持机构200用于加持物品并带动装置垂直移动,具体的,所述垂直夹持机构200包括安装在移动臂100驱动端的移动座210、对称安装在移动座210上的垂直机构220、安装在垂直机构220移动端的夹持座230和安装在夹持座230上的吸附盘240,且两个垂直机构220可独立被控制装置400控制,使用时,通过控制装置400独立控制两个垂直机构220下移并接触物料,接着通过吸附盘240产生负压将装置吸附,接着控制垂直机构220上移完成驱动的作用;
28.气泵组件300用于为吸附盘240产生负压或者正压,具体跌,所述气泵组件300安装
在移动臂100上,所述气泵组件300与吸附盘240连通;
29.控制装置400用于驱动移动臂100和垂直夹持机构200的运行和关闭,具体的,所述控制装置400安装在移动臂100上,所述控制装置400连接至移动臂100和垂直夹持机构200。
30.进一步的,请参阅图1,所述垂直机构220、平移机构110和横移机构120均由轨道壳体、安装在轨道壳体上的行走齿条、与行走齿条啮合连接的伺服电机和与伺服电机固定连接的移动板组成,且所述垂直机构220与横移机构120的移动板连接,所述横移机构120与平移机构110的移动板连接,使用时,通过伺服电机在在行走齿条上移动带动移动板相对轨道壳体移动,进而实现驱动移动,其结构简单便于维护。
31.进一步的,请参阅图1,每个所述夹持座230上均设置有四个吸附盘240,所述吸附盘240与夹持座230螺接,多点吸附,有利于增加连接吸附强度。
32.进一步的,请参阅图1和4,所述吸附盘240包括与夹持座230螺接的主体241、安装在主体241底部的吸盘242、设置开设在主体241和吸盘242中部的吹气孔243和设置在吸盘242底部并贯穿主体241侧壁的吸附孔244;所述气泵组件300包括两个气泵,一个气泵的吸气端与吸附孔244连通,另一个气泵的出气端与吹气孔243连通,在进行吸附夹持的时候,通过气泵对吹气孔243吹气,即可对物料表面进行吹气,将物料表面杂物灰尘吹干净,接着通过另一个气泵产生负压,此时吸附孔244产生负压将物料表面吸附,进而可实现避免杂物,灰尘影响机械手的使用夹持。
33.工作原理:在一种注塑机的取料机械手使用的时候,首先对装置通电,头控制用于控制移动臂100、垂直夹持机构200和气泵组件300的启动和运行,通过移动臂100驱动垂直夹持机构200进行夹持操作,此时气泵组件300产生负压辅助吸附盘240进行吸附夹持,通过可独立控制的垂直夹持组件的设置,有利于应对不同形状的物料表面,或者较小面积的物料夹持;但是在日常使用时候物料表面残留的杂物浮灰等会影响夹持操作,因此我们通过吸附盘240结构,配合具有两个气泵的气泵组件300的设置,在进行吸附夹持的时候,通过气泵对吹气孔243吹气,即可对物料表面进行吹气,将物料表面杂物灰尘吹干净,接着通过另一个气泵产生负压,此时吸附孔244产生负压将物料表面吸附,进而可实现避免杂物,灰尘影响机械手的使用夹持。
34.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
35.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1