一种注塑机的制作方法
1.本技术涉及注塑设备的领域,尤其是涉及一种注塑机。
背景技术:
2.在临床中常常需要对疮面细菌进行采集培养,以用来检验感染的细菌,为临床医生提供足够的情报来合理利用抗生素。
3.在临床时,通常通过一次性无菌取样装置对疮面上的脓液及分泌物进行采集,一次性无菌取样装置包括一根握持棒和一根试管,握持棒的一端设置有用于蘸取的蘸取头,握持棒的另一端设置有盖子,盖子与试管的开口一端螺纹连接,初始状态握持棒位于试管内,盖子配合螺纹安装在试管的开口端将试管封闭。
4.参照图1,握持棒通常为塑料材质,通过注塑机注塑成型,且注塑成型后的多根握持棒均连接在一根安装杆7上,通过安装杆7对多根握持棒进行固定,使得后续安装蘸取头时可对多根握持棒进行同步安装,提高了蘸取头的安装效率,且握持棒和安装杆7的连接处的横截面积较小,使得后续将握持棒从安装杆7上取下时较为方便。
5.注塑机注塑完成后,两块模板相互分离,通过模具的顶出机构将安装杆及握持棒从模板上顶出后,安装杆及握持棒掉落在注塑机下方的回收筐内完成收集,然而由于握持棒和安装杆之间的连接处的横截面积较小,掉落在回收筐中的握持杆与安装杆之间的连接处可能会出现形变或者断裂,进而对后续的制作工序产生干扰,降低了一次性无菌取样装置的整体生产效率。
技术实现要素:
6.为了解决注塑机出料时落下的握持杆及安装杆之间的连接处可能会出现形变的问题,本技术提供一种注塑机。
7.本技术提供的一种注塑机采用如下的技术方案:
8.一种注塑机,包括机架,所述机架上安装有注塑机本体,所述机架设置有传送带,所述机架还设置有用于将安装杆及握持杆从所述注塑机本体中取出至所述传送带上的取料机构,所述传送带的出料端下设置有收集筐,所述传送带的出料端的竖直投影位于所述收集筐内,所述收集筐内竖直滑移安装有呈水平的托板,所述收集筐设置有用于带动所述托板滑移的驱动机构。
9.通过采用上述技术方案,当注塑机本体将握持杆及安装杆注塑完成后,通过取料机构将握持杆及安装杆运输至传送带上,传送带将握持杆和安装杆运输至收集筐的托板上,同时驱动机构按照托板上的握持杆及安装杆的数量带动托板竖直向下滑移,使得握持杆和安装杆落入到收集筐中时的下落高速始终保持在较合适的程度,进而使得握持杆和安装杆在落入到收集筐中时两者的连接处不易形变,进而使得后续的握持杆加工工序的效率不易受到干扰,提高了一次性无菌取样装置的生产效率。
10.可选的,所述取料机构包括安装在所述注塑机本体上方的所述机架上的导轨,所
述导轨延伸至所述传送带上方,所述导轨上滑移安装有滑块,所述导轨设置有用于驱动所述滑块滑移的第一驱动件,所述滑块上竖直滑移安装有滑杆,所述滑杆呈竖直且所述滑杆的下端设置有用于夹持滑杆及握持杆的夹持件,所述滑块设置有用于驱动所述滑杆滑移的第二驱动件。
11.通过采用上述技术方案,当握持杆及安装杆注塑完成后,第一驱动件带动滑块滑移至握持杆上方,第二驱动件驱动滑杆滑移至注塑机本体的模具处通过夹持件将握持杆及安装杆固定在滑杆上,滑杆竖直向上滑移将握持杆及安装杆从注塑机本体内取出,然后滑块滑移至传送带上方,滑杆滑移将握持杆及安装杆放置在传送带上,由于从注塑机本体的顶壁上将握持杆及安装杆取出,使得周围的工作人员不易被注塑机本体内的热空气烫伤。
12.可选的,所述第一驱动件包括驱动电机和第一丝杆,所述第一丝杆转动安装在所述导轨上,且所述第一丝杆的轴线与所述导轨的长度方向平行,所述第一丝杆穿过所述滑块且与所述滑块螺纹配合,所述驱动电机安装在所述机架上且所述驱动电机的输出轴与所述第一丝杆传动连接。
13.通过采用上述技术方案,以驱动电机及第一丝杆带动滑块滑移,使得滑块在滑移时较为稳定,且定位较为精准,使得夹持件对握持杆及安装杆进行夹持时不易出现误差。
14.可选的,所述第二驱动件包括安装在所述滑块上的第一气缸,所述第一气缸的活塞杆呈竖直向下伸缩,所述第一气缸的活塞杆的下端与所述滑杆的下端连接。
15.通过采用上述技术方案,由于滑杆与滑块之间滑移配合,使得第一气缸的活塞杆在带动滑杆滑移时,滑杆不易对第一气缸的活塞杆产生径向力,使得第一气缸在使用时较为稳定。
16.可选的,所述夹持件包括板面呈竖直与安装杆及握持杆相夹持配合的第一夹板和第二夹板,所述第一夹板安装在所述滑杆下端,所述第二夹板滑移安装在所述第一夹板上,所述第一夹板安装有第二气缸,所述第二气缸的活塞杆与所述第二夹板连接,所述第二气缸的活塞杆的轴线与所述第二夹板的滑移方向平行。
17.通过采用上述技术方案,第二夹板通过第二气缸为动力源进行滑移,由于第二气缸的伸缩行程较为稳定,误差较小,进而使得第二夹板夹紧安装杆不易出现压力过大导致握持杆及安装杆被夹碎的现象。
18.可选的,所述第一夹板和所述第二夹板的相对一面上均安装有橡胶板,所述橡胶板的相对一面上均开设有用于与握持杆夹持配合的凹槽,所述凹槽的轴线呈竖直且所述凹槽长度方向的两端均将所述橡胶板贯穿。
19.通过采用上述技术方案,橡胶板用于对第二夹板和第一夹板夹持握持杆时的误差进行补充,使得第一夹板和第二夹板更加不易对握持杆产生损伤的同时,橡胶板和握持杆之间的摩擦力较大,第一夹板和第二夹板在夹持握持杆时所需的夹紧力较小,握持杆更加不易出现损坏。
20.可选的,所述第一夹板和所述第二夹板的相对一端面上均设置有安装块,两块所述安装块的相对一面均开设有燕尾槽,所述燕尾槽的长度方向的一端将所述安装块的顶壁贯穿,所述橡胶板设置有与所述燕尾槽滑移配合的燕尾块,所述燕尾块滑移安装在是燕尾槽中。
21.通过采用上述技术方案,橡胶板通过燕尾块和燕尾槽之间的配合可较为方便地可
拆卸安装在安装块上,且由于燕尾槽将安装块的顶壁贯穿,橡胶板的燕尾块通过燕尾槽的上端滑移安装在燕尾槽中,使得橡胶板在使用时不易从安装块上脱落。
22.可选的,所述驱动机构包括驱动齿轮和第二丝杆,所述第二丝杆转动安装在所述收集筐内,且所述第二丝杆呈竖直,所述第二丝杆穿过所述托板且与所述托板螺纹配合,所述驱动齿轮转动安装在所述收集筐上,所述驱动齿轮与所述第二丝杆传动连接,所述传送带通过两根传送辊转动安装在所述机架上,靠近所述收集筐的所述传送辊的一端同轴安装有主动齿轮,所述主动齿轮与所述驱动齿轮啮合。
23.通过采用上述技术方案,用于带动传送带运动的传送辊通过主动齿轮和从动齿轮之间的啮合配合带动第二丝杆转动,进而带动托板配合传送带的运动下降,使得新的握持杆和安装杆落入到收集筐内时,握持杆和安装杆的下落距离均较合适,握持杆和安装杆的连接处不易产生形变。
24.可选的,所述收集筐安装有复位电机,所述复位电机的输出轴与所述驱动齿轮传动连接,所述收集筐的外侧壁设置有启动按钮与所述复位电机连接,所述收集筐内侧壁的上端设置有停止按钮与所述复位电机连接。
25.通过采用上述技术方案,工作人员通过复位电机可较为方便地带动第二丝杆转动将托板复位,且托板滑移至初始高度时,托板抵紧停止按钮,复位电机停止,使得复位电机不易因为空转而出现损坏。
26.综上所述,本技术包括以下至少一种有益技术效果:
27.1.当注塑机本体将握持杆及安装杆注塑完成后,通过取料机构将握持杆及安装杆运输至传送带上,传送带将握持杆和安装杆运输至收集筐的托板上,同时驱动机构按照托板上的握持杆及安装杆的数量带动托板竖直向下滑移,使得握持杆和安装杆落入到收集筐中时的下落高速始终保持在较合适的程度,进而使得握持杆和安装杆在落入到收集筐中时两者的连接处不易形变,进而使得后续的握持杆加工工序的效率不易受到干扰,提高了一次性无菌取样装置的生产效率;
28.2.第二夹板通过第二气缸为动力源进行滑移,由于第二气缸的伸缩行程较为稳定,误差较小,进而使得第二夹板夹紧安装杆不易出现压力过大导致握持杆及安装杆被夹碎的现象;
29.3.用于带动传送带运动的传送辊通过主动齿轮和从动齿轮之间的啮合配合带动第二丝杆转动,进而带动托板配合传送带的运动下降,使得新的握持杆和安装杆落入到收集筐内时,握持杆和安装杆的下落距离均较合适,握持杆和安装杆的连接处不易产生形变。
附图说明
30.图1是本技术的相关技术中的握持杆和安装杆注塑完成后的正视图。
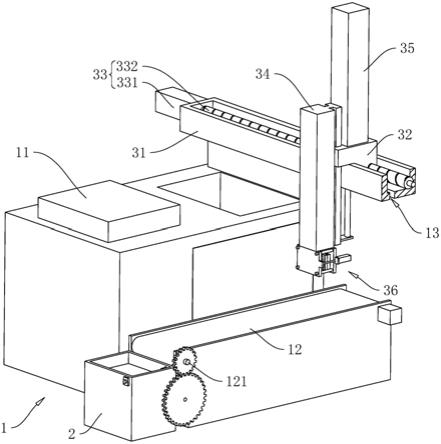
31.图2是本技术的立体结构示意图,图中将导轨剖切。
32.图3是本技术的夹持件处的立体结构示意图。
33.图4是本技术的收集筐处的立体结构示意图,图中将收集筐剖切
34.附图标记:1、机架;11、注塑机本体;12、传送带;121、传送辊;13、长孔;2、收集筐;21、托板;22、驱动机构;221、驱动齿轮;222、第二丝杆;223、蜗轮;224、蜗杆;225、主动齿轮;23、复位电机;24、启动按钮;25、停止按钮;3、取料机构;31、导轨;32、滑块;33、第一驱动件;
331、驱动电机;332、第一丝杆;34、滑杆;35、第一气缸;36、夹持件;361、第一夹板;362、第二夹板;363、导杆;364、第二气缸;4、橡胶板;41、凹槽;42、燕尾块;5、安装块;51、燕尾槽;6、握持杆;7、安装杆。
具体实施方式
35.以下结合附图2-4对本技术作进一步详细说明。
36.本技术实施例公开一种注塑机,参照图2,包括放置在地面的机架1,机架1上固定安装有注塑机本体11,机架1设置有取料机构3,取料机构3包括注塑机本体11的进出料一侧的机架1上固定安装的导轨31,导轨31呈水平且导轨31上滑移安装有滑块32。导轨31设置有第一驱动件33,第一驱动件33包括固定安装在导轨31一端的驱动电机331,导轨31上转动安装有第一丝杆332,第一丝杆332的轴线与导轨31的长度方向平行,第一丝杆332的一端与驱动电机331的输出轴同轴固定连接,第一丝杆332的另一端穿过滑块32且与滑块32螺纹配合。
37.参照图2,滑块32上竖直滑移安装有滑杆34,滑杆34呈竖直。滑块32上设置有第二驱动机构22,第二驱动机构22包括固定安装在滑块32上的第一气缸35,第一气缸35的活塞杆竖直向下伸缩。导轨31上贯穿开设有长孔13,长孔13的长度方向与导轨31的滑移方向平行,第一气缸35的活塞杆的下端依次穿过滑块32及长孔13与滑条的下端之间固定连接,第一气缸35的活塞杆与长孔13滑移配合,通过第一气缸35带动滑杆34滑移。
38.参照图2和图3,滑杆34下端设置有夹持件36,夹持件36包括固定安装在滑杆34下端的第一夹板361,第一夹板361呈竖直且第一夹板361的长度方向呈水平。第一夹板361任一板面的长度方向的两端上均固定安装有两根导杆363,导杆363的轴线呈水平且与第一夹板361的板面垂直。第一夹板361设置有第二夹板362,第二夹板362与第一夹板361平行,且两根导杆363均穿过第二夹板362与第二夹板362滑移配合。第一夹板361上固定安装有第二气缸364,第二气缸364的活塞杆的轴线与导杆363的轴线平行,第二气缸364的活塞杆远离第一夹板361的一端与第二夹板362固定连接。
39.参照图2和图3,第一夹板361和第二夹板362的相对一面上均一体设置有矩形安装块5,安装块5的相对一面均开设有呈竖直的燕尾槽51,燕尾槽51的上端将安装块5的顶壁贯穿。安装块5上设置有橡胶板4,橡胶板4上一体设置有与燕尾槽51滑移配合的燕尾块42,燕尾块42滑移安装在燕尾槽51中,橡胶板4通过燕尾块42和燕尾槽51之间的配合固定安装在安装块5上。
40.参照图2和图3,两块橡胶板4的相对一面上均开设有若干与握持杆6相配合的圆弧形凹槽41,凹槽41轴线呈竖直且凹槽41的长度方向的两端分别将橡胶板4的相对两侧壁贯穿。第二气缸364的活塞杆收缩有,安装杆7被第一夹板361和第二夹板362夹紧,若干握持杆6被两块橡胶板4上的相互拼合的凹槽41侧壁一一对应夹紧。
41.参照图2和图4,注塑机本体11一侧的机架1上转动安装有两根呈水平的传送辊121,两根传送辊121之间通过传送带12连接,传送带12的一端位于导轨31正下方,滑杆34的长度与传动带的高度相配合,通过滑杆34滑移将握持杆6及安装杆7放置在传送带12上。传送带12远离导轨31的一端朝向地面倾斜。传送带12的下端下方的机架1上固定安装有收集筐2,收集筐2内配合竖直滑移安装有托板21,托板21呈水平,托板21用于对握持杆6及安装
杆7进行承托。
42.参照图2和图4,收集筐2设置有驱动机构22,驱动机构22包括转动安装在收集筐2内的第二丝杆222,第二丝杆222的轴线呈竖直,且第二丝杆222穿过托板21与托板21螺纹配合。驱动机构22还包括竖直转动安装在收集筐2外侧壁上的驱动齿轮221,驱动齿轮221与限位条相配合,位于收集筐2处的传送辊121的一端同轴固定安装有主动齿轮225,主动齿轮225与驱动齿轮221啮合。
43.参照图2和图4,第二丝杆222的下端同轴固定安装有蜗轮223,收集筐2内部转动安装有蜗杆224,蜗杆224与蜗轮223内核,蜗杆224的一端穿出收集筐2与驱动齿轮221之间通过锥齿轮传动连接,进而通过与主动齿轮225啮合的驱动齿轮221带动第二丝杆222转动带动托板21竖直向下滑移。
44.参照图2和图4,在收集筐2外侧壁上还固定安装有复位电机23,复位电机23的输出轴与驱动齿轮221同轴固定连接。收集筐2的外侧壁固定安装有启动按钮24,收集筐2的内侧壁的上端固定安装有停止按钮25,启动按钮24与停止按钮25均与复位电机23连接。通过启动按钮24启动复位电机23,托板21滑移至指定位置后,抵紧停止按钮25将停止按钮25按下,复位电机23停止。
45.本技术实施例一种注塑机的实施原理为:注塑机本体11注塑完成后,驱动电机331启动带动滑块32滑移至注塑机本体11的进出料端上方,然后第一气缸35启动带动滑杆34滑移至注塑完成的握持杆6及安装杆7处,第二气缸364启动带动第二夹板362滑移,第一夹板361和第二夹板362将安装杆7夹紧,两块橡胶板4将握持杆6夹紧,然后第一气缸35启动将握持杆6及安装杆7从模板中拔出,驱动电机331启动带动滑块32滑移至传动带上方,第一气缸35启动将握持杆6及安装杆7运送至传送带12上方,第二气缸364启动将握持杆6及安装杆7松开,握持杆6和安装杆7落在传送带12上,然后在传送带12的带动下与第一夹板361及第二夹板362分离。
46.沿传送带12运动的握持杆6及安装杆7最终落在收集筐2的托板21上被收集,且随着传送带12的传送辊121的运动,传送辊121通过主动齿轮225和驱动齿轮221之间的配合带动第二丝杆222转动,进而带动托板21竖直向下移动,以配合托板21上不断堆积的握持杆6及安装杆7,使得握持杆6和安装杆7不会从收集筐2中溢出,且握持杆6及安装杆7的下落距离保持在一定范围内。
47.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1