一种塑胶模具联动机械手及下料方法与流程
1.本发明涉及机械手技术领域,更具体地说,涉及一种塑胶模具联动机械手及下料方法。
背景技术:
2.机械手能够替代人工进行一些危险区域的抓取以及移料动作,能够有效的保障工人的人身安全;目前应用于注塑模具上的机械手,大都是独立于模具设置,需要额外的动力系统以及控制系统,能源消耗较大且成本会较高,同时也存在控制时效较差的缺陷。
技术实现要素:
3.本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种塑胶模具联动机械手,还提供了一种塑胶模具联动机械手下料方法。
4.本发明解决其技术问题所采用的技术方案是:
5.构造一种塑胶模具联动机械手,其中,包括安装在上模座外侧表面的随动单元和安装在下模座外侧表面的机械手本体;所述随动单元随所述上模座升降而升降,且所述随动单元上设置有纵向的第一齿条;所述机械手本体包括横向的与所述下模座固定连接的连接板,所述连接板上设置有下料通槽,所述下料通槽与所述连接板的一端连通;所述连接板的上表面横向滑动设置有位于所述下料通槽上方的移动板和对所述移动板移动位置限位的限位块,所述移动板的上表面滑动设置有第二齿条,所述第二齿条和所述移动板通过直线阻尼器连接;所述连接板上设置有驱动所述第二齿条移动的往复丝杆,所述往复丝杆的丝杆轴上设置有由所述第一齿条驱动的从动齿轮;所述移动板的上表面设置有横向分布的左夹臂和右夹臂,所述左夹臂和所述右夹臂的前端均伸出所述移动板,所述左夹臂和所述右夹臂的尾端均设置有与所述移动板横向转动连接的转动齿轮,两个所述转动齿轮分别与所述第二齿条的两侧表面通过换向齿轮啮合传动。
6.本发明所述的塑胶模具联动机械手,其中,所述移动板的上表面设置有检测所述直线阻尼器的伸缩状态的第一传感器,所述连接板上检测所述往复丝杆运行状态的第二传感器,所述塑胶模具联动机械手还包括报警单元;所述报警单元接收所述第一传感器和所述第二传感器数据,并在所述往复丝杆运行过程非触发所述直线阻尼器的节点位置收到所述直线阻尼器伸缩运行数据时进行对外界报警。
7.本发明所述的塑胶模具联动机械手,其中,所述连接板上设置有增速齿轮箱,所述增速齿轮箱的输入端设置有与所述第一齿条啮合的输入齿轮,所述增速齿轮箱的输出端设置有与所述从动齿轮啮合的输出齿轮。
8.本发明所述的塑胶模具联动机械手,其中,所述增速齿轮箱上设置有对所述第一齿条移动导向的导向套。
9.本发明所述的塑胶模具联动机械手,其中,所述第一齿条的截面呈t型,所述导向套的内孔为t型孔。
10.本发明所述的塑胶模具联动机械手,其中,所述左夹臂和所述右夹臂均包括v型的夹持部,且v型的夹角为钝角;所述夹持部一端设置有连接段,所述连接段与所述转动齿轮的上表面的轴心处固定连接;两个所述夹持部夹持工件时,所述往复丝杆到达换向临界点。
11.本发明所述的塑胶模具联动机械手,其中,所述夹持部的内臂设置有防护胶垫。
12.一种塑胶模具联动机械手下料方法,应用于上述的塑胶模具联动机械手,其实现方法如下:
13.模具注塑完成后开模并对工件顶升脱模,随动单元随上模座上行,第一齿条上行驱动往复丝杆运行,进而带动第二齿条朝向模具移动,第二齿条通过直线阻尼器带动移动板随其同步同向移动;
14.当移动板移动到受到限位块阻挡时停止移动,此时往复丝杆继续运行带动第二齿条移动,直线阻尼器被拉伸,第二齿条移动的同时驱动两个换向齿轮转动,进而带动两个转动齿轮转动,左夹臂和右夹臂进行转动合拢夹持工件;
15.夹持工件到位时往复丝杆到达换向临界点,带动第二齿条反向移动退出模具,移动板受直线阻尼器的推动进行反向移动复位;
16.当移动板复位到初始位置后受限不移动,往复丝杆继续运行带动第二齿条移动,直线阻尼器被压缩复位,第二齿条移动的同时驱动两个换向齿轮转动,进而带动两个转动齿轮转动,左夹臂和右夹臂进行转动分开松开工件,工件穿过下料通槽落下出料。
17.本发明的有益效果在于:模具注塑完成后开模并对工件顶升脱模,随动单元随上模座上行,第一齿条上行驱动往复丝杆运行,进而带动第二齿条朝向模具移动,第二齿条通过直线阻尼器带动移动板随其同步同向移动;当移动板移动到受到限位块阻挡时停止移动,此时往复丝杆继续运行带动第二齿条移动,直线阻尼器被拉伸,第二齿条移动的同时驱动两个换向齿轮转动,进而带动两个转动齿轮转动,左夹臂和右夹臂进行转动合拢夹持工件;夹持工件到位时往复丝杆到达换向临界点,带动第二齿条反向移动退出模具,移动板受直线阻尼器的推动进行反向移动复位;当移动板复位到初始位置后受限不移动,往复丝杆继续运行带动第二齿条移动,直线阻尼器被压缩复位,第二齿条移动的同时驱动两个换向齿轮转动,进而带动两个转动齿轮转动,左夹臂和右夹臂进行转动分开松开工件,工件穿过下料通槽落下出料;
18.应用本发明的联动机械手,结构设置合理且紧凑,不需要额外的设置动力系统以及控制系统,依靠上模座的开模上升动力就能够实现机械手的伸入、夹持、退出、松开、落料五个操作,可靠性好,下料效率高,且成本极低。
附图说明
19.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将结合附图及实施例对本发明作进一步说明,下面描述中的附图仅仅是本发明的部分实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图:
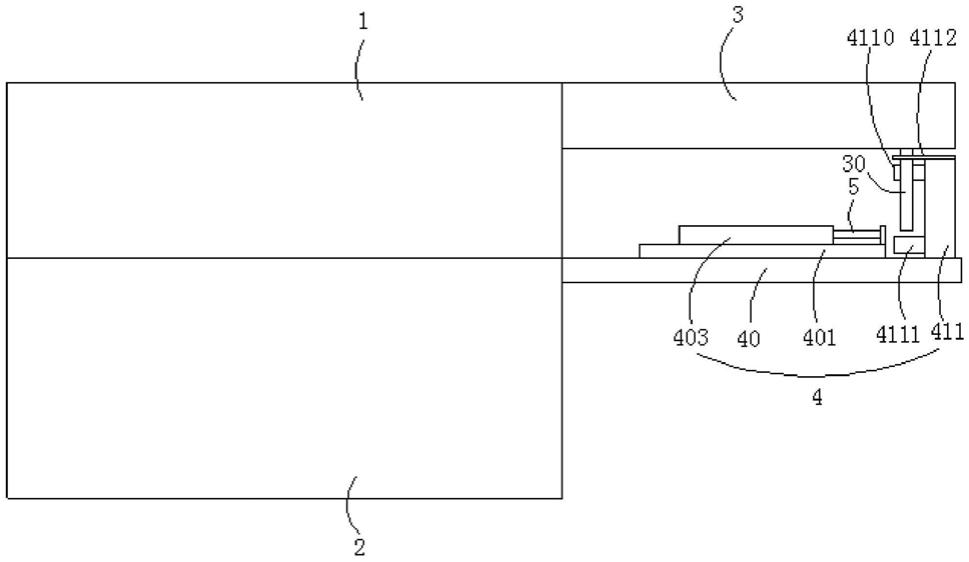
20.图1是本发明较佳实施例的塑胶模具联动机械手侧视图(隐藏左夹臂、右夹臂以及往复丝杆);
21.图2是本发明较佳实施例的塑胶模具联动机械手连接板俯视图。
具体实施方式
22.为了使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的部分实施例,而不是全部实施例。基于本发明的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明的保护范围。
23.本发明较佳实施例的塑胶模具联动机械手,如图1所示,同时参阅图2,包括安装在上模座1外侧表面的随动单元3和安装在下模座2外侧表面的机械手本体4;随动单元2随上模座1升降而升降,且随动单元3上设置有纵向的第一齿条30;机械手本体4包括横向的与下模座2固定连接的连接板40,连接板40上设置有下料通槽400,下料通槽400与连接板40的一端连通;连接板40的上表面横向滑动设置有位于下料通槽400上方的移动板401和对移动板401移动位置限位的限位块402,移动板401的上表面滑动设置有第二齿条403,第二齿条403和移动板401通过直线阻尼器5连接;连接板40上设置有驱动第二齿条403移动的往复丝杆404,往复丝杆404的丝杆轴上设置有由第一齿条30驱动的从动齿轮405;移动板401的上表面设置有横向分布的左夹臂406和右夹臂407,左夹臂406和右夹臂407的前端均伸出移动板401,左夹臂406和右夹臂407的尾端均设置有与移动板401横向转动连接的转动齿轮408,两个转动齿轮408分别与第二齿条403的两侧表面通过换向齿轮409啮合传动;
24.模具注塑完成后开模并对工件顶升脱模(模具本身的常规功能),随动单元3随上模座1上行,第一齿条30上行驱动往复丝杆404运行,进而带动第二齿条403朝向模具移动,第二齿条403通过直线阻尼器5带动移动板401随其同步同向移动;
25.当移动板401移动到受到限位块402阻挡时停止移动,此时往复丝杆404继续运行带动第二齿条403移动,直线阻尼器5被拉伸,第二齿条403移动的同时驱动两个换向齿轮409转动,进而带动两个转动齿轮408转动,左夹臂406和右夹臂407进行转动合拢夹持工件(依靠直线阻尼器的阻尼力进行夹持状态保持);
26.夹持工件到位时往复丝杆404到达换向临界点,带动第二齿条403反向移动退出模具,移动板401受直线阻尼器5的推动进行反向移动复位;当移动板401复位到初始位置后受限不移动(此处可以设置成滑动的行程的端点限位,也可以再设置一个限位块进行阻挡限位),往复丝杆404继续运行带动第二齿条403移动,直线阻尼器5被压缩复位,第二齿条403移动的同时驱动两个换向齿轮409转动,进而带动两个转动齿轮408转动,左夹臂406和右夹臂407进行转动分开松开工件,工件穿过下料通槽400落下出料;
27.应用本发明的联动机械手,结构设置合理且紧凑,不需要额外的设置动力系统以及控制系统,依靠上模座1的开模上升动力就能够实现机械手的伸入模具、夹持工件、退出模具、松开工件、落料下料五个操作,可靠性好,下料效率高,且成本极低。
28.优选的,移动板401的上表面设置有检测直线阻尼器5的伸缩状态的第一传感器4010,连接板40上检测往复丝杆404运行状态的第二传感器410,塑胶模具联动机械手还包括报警单元(图中未显示);报警单元接收第一传感器4010和第二传感器410数据,并在往复丝杆404运行过程非触发直线阻尼器5的节点位置收到直线阻尼器5伸缩运行数据时进行对外界报警;
29.通过第一传感器检测直线阻尼器的伸缩状态,通过第二传感器检测往复丝杆的运行状态,便于掌握往复丝杆运行状态的前提下,还没有到达如上述的直线阻尼器发生动作
的节点时,若直线阻尼器提前出现动作(因质量问题或长时间使用老化等因素),则会对工件的夹持带来干扰甚至会影响夹持动作,报警单元进行报警提醒需要进行设备维护;
30.较佳的,第一传感器4010设置有两个,分别用于检测直线阻尼器缩回状态和伸出状态;第二传感器410设置有四个,分别对初始位置、最大移动位置、直线阻尼器的伸出位置和直线阻尼器的缩回位置进行监测。
31.优选的,连接板40上设置有增速齿轮箱411,增速齿轮箱411的输入端设置有与第一齿条30啮合的输入齿轮4110,增速齿轮箱411的输出端设置有与从动齿轮405啮合的输出齿轮4111;通过增速齿轮箱411对上模座的上行动作进行放大输入,转换成往复丝杆404的长距离的运行。
32.优选的,增速齿轮箱411上设置有对第一齿条30移动导向的导向套4112;较佳的,第一齿条的截面呈t型,导向套的内孔为t型孔,保障机械强度以及可靠性。
33.优选的,左夹臂406和右夹臂407均包括v型的夹持部,夹持部的内臂设置有防护胶垫,且v型的夹角为钝角;夹持部一端设置有连接段,连接段与转动齿轮的上表面的轴心处固定连接;两个夹持部夹持工件时,往复丝杆到达换向临界点;结构简洁,夹持可靠性好,对工件的尺寸适应性较好。
34.一种塑胶模具联动机械手下料方法,应用于上述的塑胶模具联动机械手,其实现方法如下:
35.模具注塑完成后开模并对工件顶升脱模,随动单元随上模座上行,第一齿条上行驱动往复丝杆运行,进而带动第二齿条朝向模具移动,第二齿条通过直线阻尼器带动移动板随其同步同向移动;
36.当移动板移动到受到限位块阻挡时停止移动,此时往复丝杆继续运行带动第二齿条移动,直线阻尼器被拉伸,第二齿条移动的同时驱动两个换向齿轮转动,进而带动两个转动齿轮转动,左夹臂和右夹臂进行转动合拢夹持工件;
37.夹持工件到位时往复丝杆到达换向临界点,带动第二齿条反向移动退出模具,移动板受直线阻尼器的推动进行反向移动复位;
38.当移动板复位到初始位置后受限不移动,往复丝杆继续运行带动第二齿条移动,直线阻尼器被压缩复位,第二齿条移动的同时驱动两个换向齿轮转动,进而带动两个转动齿轮转动,左夹臂和右夹臂进行转动分开松开工件,工件穿过下料通槽落下出料;
39.应用本发明的联动机械手,结构设置合理且紧凑,不需要额外的设置动力系统以及控制系统,依靠上模座的开模上升动力就能够实现机械手的伸入、夹持、退出、松开、落料五个操作,可靠性好,下料效率高,且成本极低。
40.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1