注塑成型成套设备及其注塑成型自动化生产方法与流程
1.本发明涉及汽车气囊制造技术领域,具体涉及一种汽车副驾驶气囊位置镶嵌螺钉及仪表板注塑一体的注塑成型成套设备及其注塑成型自动化生产方法。
背景技术:
2.现今汽车行业普遍及快速发展的情况下,汽车安全成为人们最为关切的问题,安全气囊起着至关重要的作用,由于汽车副驾驶气囊位置处螺钉与仪表板的镶嵌涉及的产量高需求量大,这将对一个企业有着重大考验,人工安装需要进入模具区安装气囊网具有高危险性,人工安装不固定,肉眼检测不标准,产效率慢等问题。
技术实现要素:
3.鉴于上述问题,本发明的目的是提供一种注塑成型成套设备及其注塑成型自动化生产方法,用于汽车气囊有镶嵌螺钉安装注塑模的快速安装,成型检测的机械自动化运行,以克服上述现有技术的不足。
4.本发明提供的一种汽车副驾驶气囊位置镶嵌螺钉及仪表板注塑一体的注塑成型成套设备,包括:螺钉抓手及工件移送机构和螺钉滑台机构,
5.所述螺钉抓手及工件移送机构用于对螺钉抓取并镶嵌到模具指定位置,并对注塑完成后的仪表板进行取出;所述螺钉抓手及工件移送机构包括:机械手、安装在机械手上的工件移送机构和螺钉抓手机构,所述机械手用于带动工件移送机构和螺钉抓手机构在注塑膜与螺钉滑台机构之间运动,所述螺钉抓手机构用于抓取螺钉滑台机构上的镶嵌螺钉并嵌入至模具指定位置,所述工件移送机构用于将模具内的成品件取出;所述螺钉抓手机构安装在工件移送机构上;
6.所述螺钉滑台机构用于放置螺钉,以及输送螺钉至螺钉抓手机构抓取处;所述螺钉滑台机构包括:滑台架、安装在滑台架上的滑轨机构、以及安装在滑轨机构上的螺钉承放座。
7.作为本发明的优选结构,还包括有与工件移送机构配合的成品件输送机构,所述成品件输送机构用于将对成品件移送至工人取件处,所述成品件输送机构包括:型材支架、安装在型材支架上端面的传送带架、安装在传送带架上的传送带、安装在传送带架上并驱动传送带的滚动轴、安装在型材支架一侧并驱动滚动轴的马达、安装在型材支架上的红外检测架、安装在红外检测架上的红外传感器、安装在型材支架上并位于传送带传送末端位置的末端传感器、以及安装在型材支架上端面中间位置的防护罩,所述红外传感器用于检测传送带上有无产品零件,所述末端传感器用于检测传送带末端有无产品零件。
8.作为本发明的优选结构,所述工件移送机构包括:机架、连接机架与机械手的固定板、安装在机架上的多个连板、安装在连板上的重型弯臂、安装在重型弯臂上用于夹取工件边缘的弯臂连接单指夹、安装在机架上的多个吸盘支架、以及安装在吸盘支架上用于吸附固定工件表面的吸盘组件,所述弯臂连接单指夹位于工件的边缘位置。
9.作为本发明的优选结构,所述弯臂连接单指夹包括:安装在重型弯臂上的夹头管、安装在夹头管上的夹头、安装在夹头管内部转动杆、安装在转动杆上的转动夹座、以及安装在重型弯臂或者夹头管上用于驱动转动杆的转动电机,所述夹头的一侧安装有防滑橡胶,所述转动杆带动转动夹座转动至设定位后与夹头配合夹紧工件边缘。
10.作为本发明的优选结构,所述螺钉抓手机构包括:与机架连接的气缸固定板、安装在气缸固定板上的推动气缸、安装在推动气缸活塞杆上的夹爪架、安装在型材支架上的夹爪架限位挡板、安装在夹爪架上的两组螺钉夹爪组件、安装在夹爪架上的激光传感器和模拟检测光源,所述激光传感器用于检测工件内螺钉位置是否正确,所述模拟检测光源用于检测模具没螺钉高度位置是否正确。
11.作为本发明的优选结构,所述螺钉夹爪组件包括:螺钉固定夹气缸、安装在螺钉固定夹气缸上的螺钉固定夹、安装在螺钉固定夹气缸上的螺钉吸盘、所述螺钉吸盘位于螺钉固定夹内侧。
12.作为本发明的优选结构,还包括有相机角度调节架和相机,相机角度调节架通过立柱固定在型材支架上,相机通过螺栓固定在相机角度调节架上。
13.作为本发明的优选结构,所述滑台架包括:由型钢组成的矩形架体和位于矩形架体底部的可调节地脚,所述滑轨机构由两组平行设置的轨道、滑动连接在各自轨道上的滑块、以及驱动滑块在轨道上往复运动的滑台气缸组成,所述滑块上安装有所述螺钉承放座,所述螺钉承放座包括:呈矩形设置的钉板、均布开设在钉板上的多组螺钉存放孔。
14.本发明的另一个目的是提供一种注塑成型自动化生产方法,具体包括以下步骤:
15.步骤s1:利用螺钉滑台机构将一组螺钉移动至螺钉抓手及工件移送机构抓取处,其中,启动螺钉滑台机构的滑台气缸、滑台气缸带动滑块在轨道上滑动至初始位置,人工将一组螺钉放置在螺钉承放座的螺钉存放孔内,再次启动滑台气缸,滑台气缸带动放置有螺钉的滑块移动至螺钉抓手及工件移送机构抓取处;
16.步骤s2:利用螺钉抓手及工件移送机构中螺钉抓手机构的螺钉固定夹夹取螺栓,机械手带动螺钉抓手及工件移送机构移动至上膜安装部位,其中,利用螺钉固定夹气缸带动螺钉固定夹将螺钉夹紧,螺钉抓手机构的螺钉吸盘吸取螺钉判断螺钉固定夹是否成功抓取螺钉;
17.步骤s3:利用机械手将工件移送机构移动至上膜安装部位,利用螺钉抓手及工件移送机构中工件移送机构的吸盘组件取出位于上膜上的成品工件,同时利用弯臂连接单指夹对成品工件进行夹取固定,其中,利用重型弯臂上的夹头顶持在成品工件的背面,利用转动电机驱动转动杆,转动杆带动转动夹座将成品工件夹持在夹头与转动夹座之间;
18.步骤s4:利用机械手将位于工件移送机构下方的螺钉抓手机构移动至上膜安装部位,利用螺钉抓手机构的推动气缸将夹爪架推送至上膜安装部位的螺钉安装孔位置;
19.步骤s5:利用夹爪架上的螺钉夹爪组件将螺钉安装在工件的螺钉安装孔内,启动推动气缸将夹爪架收回至初始位置,其中螺钉夹爪组件的螺钉固定夹气缸带动螺钉固定夹的夹持端分离,使螺钉安装在工件的螺钉安装孔内;
20.步骤s6:再次启动推动气缸对安装完螺钉的工件进行螺钉位置效验,其中,启动推动气缸将夹爪架推送至上膜安装部位的螺钉安装孔位置,利用夹爪架上的激光传感器和模拟检测光源对位于工件螺钉安装孔内的螺栓进行检测,激光传感器检测螺钉安装孔内螺钉
位置是否正确,模拟检测光源检测螺钉安装孔内螺钉高度位置是否正确;
21.步骤s7:激光传感器和模拟检测光源检测对工件内的螺钉安装位置检测合格后,利用机械手带动螺钉抓手及工件移送机构移动至成品件输送机构处,工件移送机构的吸盘组件和弯臂连接单指夹同时释放成品工件,将成品工件放置在成品件输送机构上;
22.步骤s8:利用成品件输送机构的马达带动滚动轴转动,利用滚动轴带动传送带将成品工件输送至工人取件处,其中,红外检测架上的红外传感器检测到传送带上放置有成品工件后,启动马达驱动滚动轴带动传送带转动,当型材支架的末端传感器检测到传送带带动成品工件输送到末端位置后,关闭马达使传送带停止转动。
23.步骤s9:重复步骤s1进行下一循环。
24.本发明的优点及积极效果是:
25.1、本发明的螺钉抓手及工件移送机构对螺钉抓取后镶嵌到模具指定位置,并且对注塑完成后的仪表板进行取出,加快生产效率,能够适应生产实际要求具有安全、稳定、合格率高,相对人工能极大的提高生产效率。在通过螺钉滑台机构摆放螺钉位置以方便机械手进行抓取,减少机械手抓取时位置偏差。并且配合工件移送机构对成品件进行传送方便工人拿取,减少工人劳动强度。
26.2、本发明针对模具与螺母之间有四个定位柱,四个螺母需要精准定位,人员需要定位对点不方便的问题,通过螺钉夹爪组件的单指夹可有效的把产品从模具抓取出来,相对人员拿取,更快速、更平整、安装位置更稳定、同时也避免人员参与时的危险性、保证人身安全;另外,通过使用激光检测更精准,更快速的检测螺母在模具内的状态,大大提高了生产效率。
27.3、本发明抓取成品后移至传送带上方通过相机拍照进行成品对比,对比合格后放置传送带上传至工人,如检测不合格则放置不合格产品位置做进一步处理,大大提高产品的合格率。
28.4、本发明满足了生产实际要求、加快了生产效率,具有安全、稳定、合格率高的优点,通过快速定位安装气囊螺母,解决现有的人员手工安装的效率,原手工安装班产(8小时)生产160件,现自动化班产330件。并且自动化后安装位置一致,质量标准统一,可以快速有效的识别不合格产品,并且避免手工生产时,人员在注塑机里的危险性,有效的保证操作人员的安全性。
附图说明
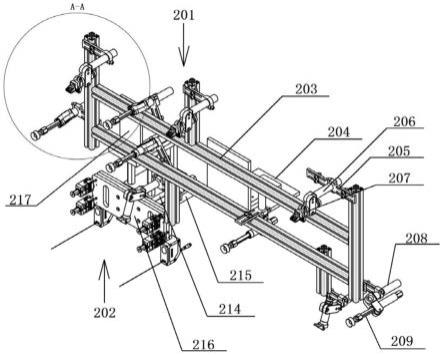
29.图1是本发明的螺钉抓手及工件移送机构整体结构示意图。
30.图2为图1的a-a放大图。
31.图3是本发明螺钉抓手机构整体结构示意图。
32.图4是本发明的螺钉抓手及工件移送机构与工件安装结构示意图。
33.图5是本发明的螺钉滑台机构整体结构示意图。
34.图6是本发明的成品件输送机构整体结构示意图。
35.附图标记:螺钉滑台机构1、滑台架101、滑轨机构102、螺钉承放座103、可调节地脚104、轨道105、螺钉存放孔106、螺钉抓手及工件移送机构2、工件移送机构201、螺钉抓手机构202、机架203、固定板204、连板205、重型弯臂206、弯臂连接单指夹207、吸盘支架208、吸
盘组件209、夹头管210、夹头211、转动杆212、转动夹座213、气缸固定板214、推动气缸215、夹爪架216、夹爪架限位挡板217、激光传感器218、模拟检测光源219、螺钉固定夹气缸220、螺钉固定夹221、螺钉吸盘222、成品件输送机构3、型材支架301、传送带架302、传送带303、滚动轴304、马达305、红外检测架306、红外传感器307、末端传感器308、防护罩309。
具体实施方式
36.在下面的描述中,出于说明的目的,为了提供对一个或多个实施例的全面理解,阐述了许多具体细节。然而,很明显,也可以在没有这些具体细节的情况下实现这些实施例。在其它例子中,为了便于描述一个或多个实施例,公知的结构和设备以方框图的形式示出。
37.实施例1
38.本实施例提供的注塑成型成套设备,包括:螺钉滑台机构1、螺钉抓手及工件移送机构2和成品件输送机构3;所述螺钉抓手及工件移送机构2用于对螺钉抓取并镶嵌到模具指定位置,并对注塑完成后的仪表板进行取出;所述螺钉抓手及工件移送机构2包括:机械手、安装在机械手上的工件移送机构201和螺钉抓手机构202,所述机械手用于带动工件移送机构201和螺钉抓手机构202在注塑膜与螺钉滑台机构2之间运动,所述螺钉抓手机构202用于抓取螺钉滑台机构2上的四个镶嵌螺钉并嵌入至模具指定位置,所述工件移送机构201用于将模具内的成品件取出;所述螺钉抓手机构202安装在工件移送机构201上。
39.本实施例中的工件移送机构201包括:机架203、固定板204、连板205、重型弯臂206、弯臂连接单指夹207、吸盘支架208、吸盘组件209,机架203由两根横梁和两根立梁组成,在上横梁和下横梁上均固连有两根与上下横梁垂直设置的支撑立柱,五个重型弯臂206分别通过连板205安装在两根立梁上,以及两根支撑立柱上。六个弯臂连接单指夹207分别安装在对应的重型弯臂206上,五个吸盘支架208分别安装机架203并穿插在重型弯臂206与重型弯臂206之间,吸盘组件209安装在对应的吸盘支架208上,用于吸附固定工件表面。五个弯臂连接单指夹207分别围绕在工件上端、以及左右两侧的边缘位置。弯臂连接单指夹207包括:安装在重型弯臂206上的夹头管210、安装在夹头管210上的夹头211、安装在夹头管210内部转动杆212、安装在转动杆212上的转动夹座213、以及安装在重型弯臂206上用于驱动转动杆的转动电机,所述夹头211的一侧安装有防滑橡胶,所述转动杆212带动转动夹座213转动至设定位后与夹头211配合夹紧工件边缘。机架203的后侧安装有快拆插板式的固定板204,快拆插板式的固定板204可快速与机械手安装。
40.本实施例中的螺钉抓手机构202包括:气缸固定板214、推动气缸215、夹爪架216、夹爪架限位挡板217、螺钉夹爪组件、激光传感器218和模拟检测光源219,气缸固定板214安装在机架203的底部位置,推动气缸215沿水平推送方向安装在气缸固定板214上,在气缸固定板214上安装有与型材支架连接的夹爪架限位挡板217,夹爪架限位挡板217可防止夹爪的时候推动气缸215晃动。夹爪架216安装在推动气缸215的活塞杆上,两组共四个螺钉夹爪组件分别安装在夹爪架216的四个边角位置,激光传感器218和模拟检测光源219安装在夹爪架216一侧的边角位置,激光传感器218用于检测工件内螺钉位置是否正确,模拟检测光源219用于检测模具没螺钉高度位置是否正确。螺钉夹爪组件包括:螺钉固定夹气缸220、安装在螺钉固定夹气缸220上的螺钉固定夹221和螺钉吸盘222、螺钉吸盘222位于螺钉固定夹221内侧,螺钉吸盘222用于吸取固定螺栓的基础上,还可以根据检查螺钉固定夹221是否抓
取成功。其中,当螺钉夹爪组件夹取完成后吸盘组件209进行通过吸盘进气口气源进行吸取,当机械手将螺钉放置在模腔内时,激光传感器218和模拟检测光源219进行检测(检测标准提前设定),如螺钉未镶嵌到位会高于检测面、低于检测面会发出警报。从而停机避免产生废品及损伤模具。
41.本实施例中的螺钉滑台机构1用于放置螺钉,以及输送螺钉至螺钉抓手机构抓取处;螺钉滑台机构1包括:滑台架101、滑轨机构102和螺钉承放座103,滑轨机构102安装在滑台架101的上端面位置,两个螺钉承放座103分别安装在对应的滑轨机构102上。滑台架101包括:由型钢组成的矩形架体和位于矩形架体底部的可调节地脚104,滑轨机构102由两组平行设置的轨道105、滑动连接在各自轨道105上的滑块、以及驱动滑块在轨道105上往复运动的滑台气缸组成。螺钉承放座103包括:呈矩形设置的钉板、均布开设在钉板上的多组螺钉存放孔106。
42.本实施例中的成品件输送机构3与工件移送机构201配合使用,成品件输送机构3用于将对成品件移送至工人取件处,成品件输送机构3包括:型材支架301、传送带架302、传送带303、滚动轴304、马达305、红外检测架306、红外传感器307、末端传感器308和防护罩309,型材支架301由多组方钢型材拼接成矩形架体,传送带架301沿型材支架301的长度方向安装在型材支架301的两侧,传送带303安装在传送带架301上,主动式滚动轴304安装在传送带303的一端并与马达305联动,其余从动轴均安装在传送带架302上,马达305安装在型材支架301的一侧边缘位置,马达305带动滚动轴304,进而带动传送带303在传送带架302上转动,防护罩309安装在型材支架301上端面中间位置,两组红外传感器307分别通过红外检测架306安装在防护罩309两侧的型材支架301上端面。末端传感器308安装在型材支架上并位于传送带传送末端位置,末端传感器308用于检测传送带末端有无产品零件。红外传感器307用于检测传送带303上有无产品零件。相机通过相机角度调节架安装在型材支架301上。其中,当产品被机械手放在在两端红外传感器307中间时,红外传感器307信号会被阻断,阻断后会发出阻断信号使电机马达305运行,马达305旋转带动滚动轴304进行转动、滚动轴304转动带动传送带303进行运动,使产品运动一段时间,当产品达到末端传感器308时,末端传感器308光源被阻断传送带停止运动,以防止产品掉落,造成损伤,如传送带上放满产品红外传感器307和末端传感器308光源同时被阻断机械手将不再将产品放置在传送带303上以防压伤产品。防护罩309起到限制机械手放置产品位置及防尘作用。
43.实施例2
44.本实施例提供一种注塑成型自动化生产方法,具体包括以下步骤:
45.步骤s1:利用螺钉滑台机构1将一组共四个螺钉移动至螺钉抓手及工件移送机构201抓取处,其中,启动螺钉滑台机构1的滑台气缸、滑台气缸带动滑块在轨道105上滑动至初始位置,人工将四个螺钉放置在螺钉承放座103的螺钉存放孔内,再次启动滑台气缸,滑台气缸带动放置有螺钉的滑块移动至螺钉抓手及工件移送机构201抓取处,平行设置的另一个螺钉滑台机构重复着与至相反的运动,保证生产的连续性;
46.步骤s2:利用螺钉抓手及工件移送机构2中螺钉抓手机构202的四个螺钉固定夹221夹取螺栓,机械手带动螺钉抓手及工件移送机构2移动至上膜安装部位,其中,利用螺钉固定夹气缸220带动螺钉固定夹221将螺钉夹紧,螺钉抓手机构202的螺钉吸盘222吸取螺钉判断螺钉固定夹是否成功抓取螺钉;
47.步骤s3:利用机械手将工件移送机构201移动至上膜安装部位,利用螺钉抓手及工件移送机构2中工件移送机构201的吸盘组件209取出位于上膜上的成品工件,同时利用弯臂连接单指夹207对成品工件进行夹取固定,其中,利用重型弯臂206上的夹头211顶持在成品工件的背面,利用转动电机驱动转动杆212,转动杆212带动转动夹座213将成品工件夹持在夹头211与转动夹座213之间;
48.步骤s4:利用机械手将位于工件移送机构201下方的螺钉抓手机构202移动至上膜安装部位,利用螺钉抓手机构202的推动气缸215将夹爪架216推送至上膜安装部位的螺钉安装孔位置;
49.步骤s5:利用夹爪架216上的螺钉夹爪组件将螺钉安装在工件的螺钉安装孔内,启动推动气缸215将夹爪架216收回至初始位置,其中螺钉夹爪组件的螺钉固定夹气缸220带动螺钉固定夹221的夹持端分离,使螺钉安装在工件的螺钉安装孔内;
50.步骤s6:再次启动推动气缸215对安装完螺钉的工件进行螺钉位置效验,其中,启动推动气缸215将夹爪架216推送至上膜安装部位的螺钉安装孔位置,利用夹爪架216上的激光传感器218和模拟检测光源219对位于工件螺钉安装孔内的螺栓进行检测,激光传感器218检测螺钉安装孔内螺钉位置是否正确,模拟检测光源219检测螺钉安装孔内螺钉高度位置是否正确;重复步骤s6,使得安装完两组螺钉的工件进行分步检测,其中,每次检测两个;
51.步骤s7:激光传感器218和模拟检测光源219检测对工件内的螺钉安装位置检测合格后,利用机械手带动螺钉抓手及工件移送机构2移动至成品件输送机构处(这个过程中注塑模对安装有螺钉的工件进行模具成型,等待工件移送机构夹取成品工件),工件移送机构201的吸盘组件209和弯臂连接单指夹207同时释放成品工件,将成品工件放置在成品件输送机构3上;
52.步骤s8:利用成品件输送机构3的马达305带动滚动轴304转动,利用滚动轴304带动传送带303将成品工件输送至工人取件处,其中,红外检测架306上的红外传感器307检测到传送带303上放置有成品工件后,启动马达305驱动滚动轴304带动传送带303转动,当型材支架301的末端传感器308检测到传送带303带动成品工件输送到末端位置后,关闭马达305使传送带303停止转动。
53.步骤s9:重复步骤s1进行下一循环。
54.以上,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1