一种余热锅炉汽包水位全程自动控制的方法与流程
1.本发明涉及余热锅炉汽包水位控制技术,具体的,涉及一种余热锅炉汽包水位全程自动控制的方法。
背景技术:
2.现在燃气电厂几乎都采用燃气
‑
蒸汽联合循环发电方式,以追求高发电效率。余热锅炉回收燃气轮机的余热,产生高压蒸汽,冲转汽轮机带动汽轮发电机组做做功。余热锅炉中一般有高压汽包、中压汽包、低压汽包水位,当其中一个水位过高和过低均会影响机组的安全,因此汽包水位是余热锅炉重要的控制参数之一。
3.目前余热锅炉的水位控制系统在启机、停机、低负荷、变负荷阶段一般以人工操作为主,只有在机组负荷稳定的情况下采用自动控制。采用的控制技术大多基于三冲量控制、pid串级控制等,实际运行过程中,只有在系统相对稳定的情况下实现自动控制。尤其是在出现虚假水位时,水位测量都会存在一定偏差。现有的控制方法难以实现余热锅炉汽包(汽包较小)水位的全程自动。
4.申请号为“cn201710457839.1”的专利公开了汽包锅炉启动阶段汽包水位控制方法及控制系统,虽然该系统可以控制汽包水位,但是该系统只能控制汽包锅炉启动时的汽包水位,不能实现锅炉汽包水位全程自动调节。
技术实现要素:
5.本发明的目的在于,针对上述问题,提出一种余热锅炉汽包水位全程自动控制的方法。
6.一种余热锅炉汽包水位全程自动控制的方法,包括如下步骤:
7.步骤1:控制参数自适应模块将实际给水量输入至主控制器参数函数f1(x)和副控制器参数函数f2(x),监测运行工况,获取主、副控制器的控制参数;
8.步骤2:前馈回路自适应模块根据pv
‑
sp值,生成7种液位模式,再根据不同的液位模式选择对应的前馈回路,前馈回路包括:ff1、ff2、ff3、ff4、ff5、ff6和ff7;
9.步骤3:执行机构流量特性自适应模块实时计算现有执行机构流量特性的偏差,当偏差出现次数时间和次数满足要求时,触发流量特性曲线生成机制,并将生成的曲线更新至现有的特性曲线中。
10.所述步骤1包括如下子步骤:
11.步骤11:根据对象的动态特性,通过经验整定,输出同一控制器不同阶段的kp,ti控制参数组,
12.汽包水位主控制器控制参数组:
13.c1={(kp1,ti1),(kp2,ti2),
…
,(kp
n
,ti
n
)},n∈r,
14.n代表控制器中参数的个数,(kp
n
,ti
n
)代表不同阶段主控器比例和积分参数组;
15.汽包水位副控制器控制参数组:
16.c2={(kp1,ti1),(kp2,ti2),
…
,(kp
n
,ti
n
)},n∈r,
17.n代表控制器中参数的个数,(kp
n
,ti
n
)代表不同阶段主控器比例和积分参数组;
18.步骤12:利用二次函数进行平滑控制器参数组c1和c2中的kp,ti与给水流量之间的对应函数:
[0019][0020]
式中a2,a1,a0分别为待求系数,f
l
为给水流量,f(x)为在相应给水流量下的参数(kp,ti);
[0021]
步骤13:利用最小二乘拟合公式,计算a2,a1,a0的数值,计算公式为:
[0022]
y=x*θ+e,
[0023]
式中:x为n
×
k的矩阵,y为n
×
1的列向量,θ为n
×
1的待求方程系数列向量,e为n
×
1的残差列向量,n为控制器参数的个数,k为待求方程系数的个数;
[0024]
步骤14:令目标函数为:q=e
t
*e,求解θ的最小二乘估计:
[0025][0026]
所述步骤2中的液位模式包括:
[0027]
液位高危急:lvl_hhh;
[0028]
液位高高:lvl_hh;
[0029]
液位高:lvl_h;
[0030]
液位正常:lvl_normal;
[0031]
液位低:lvl_l;
[0032]
液位低低:lvl_ll;
[0033]
液位低危急:lvl_lll。
[0034]
所述液位模式与前馈回路的关系为:
[0035]
当触发液位高危急(lvl_hhh)时,前馈回路选择:
[0036][0037]
当触发液位高高(lvl_hh)时,前馈回路选择:
[0038][0039]
当触发液位高(lvl_h)时,前馈回路选择:
[0040][0041]
当触发液位正常(lvl_normal)时,前馈回路选择:
[0042][0043]
当触发液位低(lvl_l)时,前馈回路选择:
[0044][0045]
当触发液位低低(lvl_ll)时,前馈回路选择:
[0046]
[0047]
当触发液位低危急(lvl_lll)时,前馈回路选择:
[0048][0049]
上述公式中,k
i1
,k
ri
,k
i2
,k
0i
(i=1,2,
…
7)为相关系数,k
i1
∈(
‑
3,3),k
ri
∈(
‑
300,300),k
i2
∈(
‑
10,10),k
0i
∈(
‑
15,15);pv为汽包水位的测量值;sp为运行人员设定汽包水位的控制值。
[0050]
所述步骤3包括如下子步骤:
[0051]
步骤31:监测执行机构的指令y
d
和实际给水流量f
l
的正常运行数据,实时计算现有执行机构流量特性的偏差,当|y
d
‑
f
l
|的绝对值连续2分钟内大于2时,这样的情况出现3次,对现有的执行机构流量特性曲线进行修正;
[0052]
步骤32:根据公式计算流量特性曲线y(x,w):
[0053][0054]
式中:x为实际给水流量,y为计算得到执行机构的指令,n为数据样本个数,w
n
代求多项式的系数;
[0055]
误差函数为:
[0056][0057]
式中:n为x样本个数;
[0058]
目标优化函数:
[0059][0060]
式中:n为x样本个数;
[0061]
步骤33:根据步骤32中得到拟合的执行机构流量特性曲线y(x,w),选择x={0,10,20,30,40,50,55,60,75,80,85,87,90,91,93,95,97,100},分别将x输入至y(x,w)函数获取对应的y值;再将获得的(x,y)值导入值执行机构流量特性曲线模块f(x)中。
[0062]
本发明的有益效果:控制参数自适应,余热锅炉启、停全过程只需要一套三冲量pid调节即可,减少逻辑冗余程度,提高逻辑运行效率;前馈回路自适应,提高在特殊工况下(如并泵,启、停机组,虚假水位等)的调节能力,确保汽包水位参数在“安全”范围内;给水执行机构流量特性自适应,提高执行机构的线性化,并减少运维工作量;汽包水位能全程投入自动,并在各种复杂工况下汽包水位均能控制在安全运行范围之内。
附图说明
[0063]
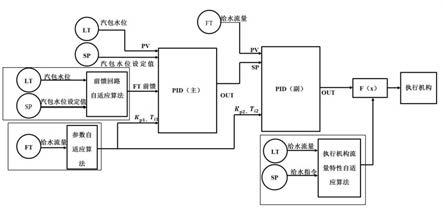
图1为本发明的控制流程图。
具体实施方式
[0064]
下面结合附图对本发明作进一步的说明。
[0065]
如图1所示,一种余热锅炉汽包水位全程自动控制的方法,通过控制参数自适应模块、前馈回路自适应模块和执行机构流量特性自适应模块进行汽包水位控制。
[0066]
控制参数自适应模块,根据生产工艺对控制品质的约束,如如衰减率φ,超调mp等参数。依据对象的动态特性,通过经验整定,给出同一控制器不同阶段的kp,ti控制参数组,
其中:
[0067]
汽包水位主控制器控制参数组:
[0068]
c1={(kp1,ti1),(kp2,ti2),
…
,(kp
n
,ti
n
)},
[0069]
n∈r,n代表控制器中参数的个数,(kp
n
,ti
n
)代表不同阶段主控器比例和积分参数组。
[0070]
汽包水位副控制器控制参数组:
[0071]
c2={(kp1,ti1),(kp2,ti2),
…
,(kp
n
,ti
n
)},
[0072]
n∈r,n代表控制器中参数的个数,(kp
n
,ti
n
)代表不同阶段主控器比例和积分参数组。
[0073]
再利用二次函数进行平滑控制器参数组c1和c2中的kp,ti与给水流量之间的对应函数,即:
[0074][0075]
式中a2,a1,a0分别为待求系数,f
l
为给水流量,f(x)为在相应给水流量下的参数(kp,ti)。
[0076]
再利用最小二乘拟合公式,计算a2,a1,a0数值,计算公式为:
[0077]
y=x*θ+e;
[0078]
式中:x为n
×
k的矩阵,y为n
×
1的列向量;θ为n
×
1的待求方程系数列向量;e为n
×
1的残差列向量;而n为控制器参数的个数,k为待求方程系数的个数。
[0079]
再令目标函数q=e
t
*e,则可以得到求解θ的最小二乘估计:
[0080][0081]
通过上述方法将主控器参数组c1和副控制器c2转换为主控制器参数函数f1(x)和副控制器参数函数f2(x),当随着给水流量的不同,将得到不同的主、副控制器参数组,以适应机组不同的工况,取得满足生产工艺要求的控制品质。
[0082]
前馈回路自适应模块,通过通过dcs实时采集汽包水位的信号,并三选、压力补偿等处理,作为汽包水位的测量值pv,运行人员设定汽包水位的控制值sp。根据pv
‑
sp值的不同,生成7种液位模式。分别是液位高危急:lvl_hhh,液位高高lvl_hh,液位高lvl_h,液位正常:lvl_normal,液位低:lvl_l,液位低低:lvl_ll,液位低危急:lvl_lll。
[0083]
当触发液位高危急lvl_hhh时,前馈回路选择:
[0084][0085]
当触发液位高高(lvl_hh)时,前馈回路选择:
[0086][0087]
当触发液位高(lvl_h)时,前馈回路选择:
[0088][0089]
当触发液位正常(lvl_normal)时,前馈回路选择:
[0090][0091]
当触发液位低(lvl_l)时,前馈回路选择:
[0092][0093]
当触发液位低低(lvl_ll)时,前馈回路选择:
[0094][0095]
当触发液位低危急(lvl_lll)时,前馈回路选择:
[0096][0097]
上述公式中,k
i1
,k
ri
,k
i2
,k
0i
(i=1,2,
…
7)为相关系数,k
i1
∈(
‑
3,3),k
ri
∈(
‑
300,300),k
i2
∈(
‑
10,10),k
0i
∈(
‑
15,15),需要根据不同的控制对象进行调整。
[0098]
执行机构流量特性自适应模块,依据执行机构的指令y
d
和实际给水流量f
l
的正常运行数据,实时计算现有执行机构流量特性的偏差,当|y
d
‑
f
l
|的绝对值连续2分钟内大于2时,这样的情况出现3次,需要对现有的执行机构流量特性曲线进行修正。
[0099]
流量特性曲线计算如下:
[0100]
依据执行机构的指令(y
d
)和实际给水流量(f
l
)正常运行的数据,产生特性曲线,通过以下多项式拟合其曲线:
[0101][0102]
式中x为实际给水流量,y为计算得到执行机构的指令,n为数据样本个数,w
n
代求多项式的系数。
[0103]
误差函数为:
[0104][0105]
式中:n为x样本个数;
[0106]
目标优化函数:
[0107][0108]
式中:n为x样本个数。
[0109]
通过上述算法得到拟合的执行机构流量特性曲线y(x,w)。选择x={0,10,20,30,40,50,55,60,75,80,85,87,90,91,93,95,97,100},分别将x输入至y(x,w)函数获取对应的y值。
[0110]
最后,将获得的(x,y)值导入值执行机构流量特性曲线模块中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1