高效便捷的电解液桶内壁除垢装置及除垢方法与流程
1.本发明涉及化工设备领域,特别是一种高效便捷的电解液桶内壁除垢装置及除垢方法。
背景技术:
2.电解液是化学电池和电解电容使用的介质,是化工领域常用的一种原料,在大部分的使用场合中均要求较高的纯度,这对电解液存放容器的洁净度提出了较高的要求。
3.电解液通常被存放在不锈钢材质的电解液桶中,电解液桶作为一种可反复使用的盛装容器,需要在每次更换(重新装填)电解液之前,对桶体内壁进行彻底的除垢和清洗操作,以避免桶内残留的杂质污染新装入的电解液。
4.目前常见的电解液桶的结构如图11所示,包括桶体61和桶盖62;桶体61呈圆柱形,其上端中心处设有开口611,开口611处的口径仅为桶体61内径的1/5~1/3;桶盖62盖设在桶体61上端开口处。由于桶体61上端开口611的口径远小于桶体61内径,人工使用清理工具(例如刷子)从开口611伸入桶体61内腔后,难以清理到桶体61内壁面,这将导致电解液桶的桶体61内壁面容易存留杂质和结垢。电解液桶在更换(重新装填)电解液时,桶内壁残留的杂质和结垢会污染电解液,导致电解液的纯度无法保障。
技术实现要素:
5.本发明的目的是克服现有技术的不足,而提供一种高效便捷的电解液桶内壁除垢装置及除垢方法,它解决了现有的电解液桶的桶内杂质难以清理,导致电解液易被污染,纯度无法保障的问题。
6.本发明的技术方案是:高效便捷的电解液桶内壁除垢装置,包括机架、料桶定位套件、刷头升降控制机构、刷头转动控制机构及刷头;机架上部设有动力容纳区间,机架下部设有料桶容纳区间,料桶容纳区间的底部设有料桶承载面;料桶定位套件设在料桶容纳区间的下端和/或上端,料桶定位套件包括至少三组呈环形分布且等高度布置的料桶定位组件,料桶定位套件中包含的所有料桶定位组件合围形成一个位于位于料桶容纳区间内的定位圈;刷头升降控制机构设在动力容纳区间内;刷头升降控制机构包括导轨、滑块、升降框架和升降驱动组件;导轨固定安装在机架的动力容纳区间内,并呈竖直竖直;滑块固定安装在升降框架上;升降框架通过滑块可滑动的安装在导轨上;升降驱动组件安装在机架的动力容纳区间内,并与升降框架关联,以驱动升降框架沿导轨做竖直方向移动;刷头转动控制机构包括水平旋转组件和竖向转动组件;水平旋转组件安装在升降框架上,并与竖向转动组件连接,以驱动竖向转动组件做水平面上的转动;刷头与竖向转动组件连接,其被竖向转动组件驱动做竖直平面内的转动。
7.本发明进一步的技术方案是:水平旋转组件包括电机a、减速机和空心轴;电机a固
定安装在升降框架上;减速机包括外壳、蜗轮和蜗杆,外壳固定安装在升降框架上,蜗轮和蜗杆相互啮合安装在外壳内部,蜗杆与电机a的机轴连接,蜗轮与空心轴通过键连接;空心轴通过键与减速机的蜗轮连接,并呈竖直布置,其上、下端分别从减速机的外壳上、下端伸出,其下端头设有第一铰接部;竖向转动组件包括气缸座、气缸b、拉杆轴、连杆;气缸座与空心轴的上端头固定连接,并位于减速机上端;气缸b固定安装在气缸座上,其活塞杆竖直向下伸出;拉杆轴活动安装在空心轴的内孔中,其上端从空心轴内孔上端的孔口伸出,并与气缸b的活塞杆固定连接,其下端头设有第二铰接部;连杆的上端头和下端头分别设有第三铰接部和第四铰接部,连杆通过第三铰接部与拉杆轴的第二铰接部铰接;刷头包括j形刷板和粘接固定在j形刷板上的刷毛,j形刷板的端部和中部分别设有第五铰接部和第六铰接部,j形刷板通过第五铰接部与连杆的第四铰接部铰接,j形刷板通过第六铰接部与空心轴的第一铰接部铰接。
8.本发明再进一步的技术方案是:机架底部设有多个相互平行、等间距、等高度布置的辊子;所述料桶承载面由所有的辊子在上端共同形成。
9.本发明更进一步的技术方案是:料桶定位组件包括气缸a、磁性开关和定位块;气缸a固定安装在机架下部,其活塞朝向料桶容纳区间内部水平伸出;磁性开关安装在气缸a上,其用于检测气缸a的活塞的运动行程;定位块固定安装在气缸a的活塞的端头上,其随着气缸a的活塞伸缩而靠近或远离料桶容纳区间的内部;所述定位圈由料桶定位套件中的所有的定位块合围而成;料桶定位套件包括四组呈环形分布且等高度布置的料桶定位组件,按照顺时针的顺序依次命名为一组、二组、三组和四组,其中,一组和四组的料桶定位组件中的定位块相互正对,二组和三组的料桶定位组件中的定位块相互正对,一组和二组的料桶定位组件中的气缸a相互平行布置,三组和四组的料桶定位组件中的气缸a相互平行布置。
10.本发明更进一步的技术方案是:升降驱动组件包括丝杆、螺母、电机b及减速器;丝杆活动安装在机架的动力容纳区间中,并呈竖直布置;螺母固定安装在升降框架上,并与丝杆螺纹连接;电机b直接或间接固定安装在机架上端;减速器固定安装在机架上端,并分别与电机b的机轴和丝杆的上端头连接,其用于将电机b的动力减速传递至丝杆上。
11.本发明更进一步的技术方案是:j形刷板包括依次连接的竖板段、弧形过渡板段和横板段;竖板段与横板段之间的夹角为90
°
,所述第五铰接部设在竖板段的端部,所述第六铰接部设在竖板段的中部。
12.本发明更进一步的技术方案是:空心轴下端设有供连杆伸出的避让缺口。
13.本发明的技术方案是:电解液桶内壁除垢方法,应用于上述的高效便捷的电解液桶内壁除垢装置,用于去除电解液桶内壁上附着的污垢和杂质;所述电解液桶包括桶体和桶盖;桶体呈圆柱形,其上端中心处设有开口;桶盖盖设在桶体上端开口处;除垢操作之前,高效便捷的电解液桶内壁除垢装置处于初始状态,在初始状态下:a、料桶定位套件中所有气缸a的活塞均处于缩回状态;b、升降框架处在其运动行程的最上端;c、刷头转动至竖直状态;除垢操作如下:s01,装载电解液桶:将待除垢的电解液桶的桶盖取下,桶体放置在机架底部的料
桶承载面上,并推送到料桶定位套件的定位圈中,此时,桶体整体位于机架下部的料桶容纳区间中;然后,料桶定位套件中所有的气缸a的活塞同步伸出,使定位圈逐渐缩小,最终,料桶定位套件中所有的定位块均与电解液桶的桶体外壁相抵,将电解液桶的桶体定位在料桶容纳区间的中心区域,此时,刷头位于桶体上端开口的正上方;s02:刷头插入桶体内腔:电机b启动,电机b通过减速器带动丝杆转动,丝杆转动带动螺母、升降框架、刷头转动控制机构和刷头同步竖直向下移动,当刷头通过桶体上端开口完全插入桶体内腔后,电机b停止运行;s03:刷头转动至水平状态:气缸b启动,气缸b的活塞的伸出,带动拉杆轴做竖直向下移动,拉杆轴通过连杆带动刷头绕j形刷板的第六铰接部在竖直平面内转动,使刷头从竖直状态转动至水平状态,此时,j形刷板的横板段上的刷毛与桶体内腔侧壁面的最上端接触;s04,桶体内壁除垢:a、电机a启动,电机a通过减速机带动空心轴转动,空心轴转动时带动竖向转动组件和刷头同步做水平面上的转动;b、电机b启动,电机b通过减速器带动丝杆转动,丝杆转动带动螺母、升降框架、刷头转动控制机构和刷头同步竖直向下移动,此时,刷头呈现一边转动一边下降的姿态,为桶体内侧壁从上至下进行除垢;当刷头下降至与桶体内腔底部时,电机b暂停运行t秒,使刷头为桶体内腔底面进行除垢;c、电机b启动,电机b通过减速器带动丝杆转动,丝杆转动带动螺母、升降框架、刷头转动控制机构和刷头同步竖直向上移动,此时,刷头呈现一边转动一边上升的姿态,为桶体内侧壁从下至上进行除垢;当刷头上升至桶体内腔最上端时,电机b停止运行;s05,刷头转动至竖直状态:气缸b启动,气缸b的活塞的缩回,带动拉杆轴做竖直向上移动,拉杆轴通过连杆带动刷头绕j形刷板的第六铰接部在竖直平面内转动,使刷头从水平状态转动至竖直状态;本步骤中,当刷头处在竖直状态时,j形刷板的竖板段平行于拉杆轴,当刷头处在水平状态时,j形刷板的竖板段垂直于拉杆轴;s06,刷头退出桶体内腔:电机b启动,电机b通过减速器带动丝杆转动,丝杆转动带动螺母、升降框架、刷头转动控制机构和刷头同步竖直向上移动,使刷头通过桶体上端开口完全退出桶体内腔,当升降框架上升至其运动行程的最上端时,电机b停止运行;s07,卸载电解液桶:料桶定位套件中所有的气缸a的活塞同步缩回,使四个定位块均与电解液桶的桶体外壁脱离,并在料桶容纳区间的两端形成可供桶体推出的出口;最后,将桶体从出口推出即可。
14.本发明进一步的技术方案是:s03步骤中,当刷头处在竖直状态时,j形刷板的竖板段平行于拉杆轴,当刷头处在水平状态时,j形刷板的竖板段垂直于拉杆轴。
15.本发明再进一步的技术方案是:s04步骤中,t的取值为5~30,刷头的转动速度为30~60转/min,刷头上升或下降速度为10~30cm/min。
16.本发明与现有技术相比具有如下优点:1、其用于电解液桶的桶体内壁除垢,除垢效果好,自动化程度高,操作简便,避免了电解液桶在更换(重新装填)电解液时,新装入的电解液被桶内杂质污染。
17.2、刷头在刷头升降控制机构和刷头转动控制机构的控制下,既可做竖直升降移动,还可做水平面上的转动和竖直面上的转动。通过不同运动方式的组合,刷头既可通过电解液桶的桶体上端狭窄的开口伸入或退出桶体内腔,还可在电解液桶的桶体内腔中进行无死角的除垢操作。
18.以下结合图和实施例对本发明作进一步描述。
附图说明
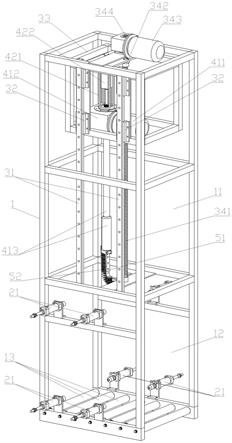
19.图1为本发明的结构示意图;图2为机架及其相连接部件的结构示意图;图3为料桶定位组件的结构示意图;图4为升降框架及其相连接部件的结构示意图;图5为刷头在竖直状态下的状态示意图;图6为刷头在水平状态下的状态示意图;图7为空心轴的结构示意图;图8为拉杆轴的结构示意图;图9为连杆的结构示意图;图10为刷头的结构示意图;图11为电解液桶的爆炸图;图12为本发明工作过程中的s01步骤状态图;图13为本发明工作过程中的s02步骤状态图;图14为本发明工作过程中的s03步骤状态图;图15为本发明工作过程中的s04步骤的b分步骤的状态图。
20.说明:为便于看清刷头在桶体内的位置和状态,图13~15中的电解液桶的桶体进行采用轴向剖切画法。
21.图例说明:机架1;动力容纳区间11;料桶容纳区间12;辊子13;气缸a21;磁性开关22;定位块23;导轨31;滑块32;升降框架33;丝杆341;螺母342;电机b343;减速器344;电机a411;减速机412;外壳4121;空心轴413;第一铰接部4131;避让缺口4132;气缸座421;气缸b422;拉杆轴423;第二铰接部4231;连杆424;第三铰接部4241;第四铰接部4242;导电导气滑环425;j形刷板51;竖板段511;弧形过渡板段512;横板段513;第五铰接部514;第六铰接部515;刷毛52;桶体61;开口611;桶盖62。
具体实施方式
22.实施例1:如图1~10所示,电解液桶内壁除垢装置,包括机架1、料桶定位套件、刷头升降控制机构、刷头转动控制机构及刷头。
23.机架1上部设有动力容纳区间11,机架1下部设有料桶容纳区间12,动力容纳区间11和料桶容纳区间12为上下正对的位置关系。料桶容纳区间12的底部设有多个相互平行、等间距、等高度布置的辊子13,所有的辊子13在上端共同形成料桶承载面。
24.两套料桶定位套件分别设在料桶容纳区间12的下端和上端。每套料桶定位套件包
括四组呈环形分布且等高度布置的料桶定位组件。料桶定位组件包括气缸a21、磁性开关22和定位块23。气缸a21固定安装在机架1下部,其活塞朝向料桶容纳区间12内部水平伸出。磁性开关22安装在气缸a21上,其用于检测气缸a21的活塞的运动行程。定位块23固定安装在气缸a21的活塞的端头上,其随着气缸a21的活塞伸缩而靠近或远离料桶容纳区间12的内部。每套料桶定位套件中包含的所有的定位块23分别合围形成一个定位圈,定位圈位于位于料桶容纳区间12内,两套料桶定位组件的所形成的定位圈上下正对。料桶定位套件中所有的气缸a21的活塞同步伸出或缩回,即可控制定位圈缩小或扩大,定位圈缩小即可将放置在料桶容纳区间12内的电解液桶定位,定位圈扩大即便于将完成除垢操作的电解液桶从料桶容纳区间12内推出,或便于将待除垢的电解液桶推入料桶容纳区间12内。
25.刷头升降控制机构设在机架1的动力容纳区间11内。刷头升降控制机构包括导轨31、滑块32、升降框架33和升降驱动组件。导轨31固定安装在机架1的动力容纳区间11内,并呈竖直竖直。滑块32固定安装在升降框架33上。升降框架33通过滑块32可滑动的安装在导轨31上。升降驱动组件安装在机架1的动力容纳区间11内,并与升降框架33关联,以驱动升降框架33沿导轨31做竖直方向移动。升降驱动组件包括丝杆341、螺母342、电机b343及减速器344。丝杆341活动安装在机架1的动力容纳区间11中,并呈竖直布置。螺母342固定安装在升降框架33上,并与丝杆341螺纹连接。电机b343固定安装在机架1上端。减速器344固定安装在机架上端,并分别与电机b343的机轴和丝杆341的上端头连接,其用于将电机b343的动力减速传递至丝杆341上。
26.刷头转动控制机构包括水平旋转组件和竖向转动组件。水平旋转组件包括电机a411、减速机412和空心轴413。电机a411固定安装在升降框架33上。减速机412包括外壳4121、蜗轮和蜗杆,外壳4121固定安装在升降框架33上,蜗轮和蜗杆相互啮合安装在外壳4112内部,蜗杆与电机a411的机轴连接,蜗轮与空心轴413通过键连接;空心轴413通过键与减速机412的蜗轮连接,并呈竖直布置,其上、下端分别从减速机412的外壳4121上、下端伸出,其下端头设有第一铰接部4131。竖向转动组件包括气缸座421、气缸b422、拉杆轴423及连杆424。气缸座421与空心轴413的上端头固定连接,并位于减速机412上端。气缸b422固定安装在气缸座411上,其活塞杆竖直向下伸出。拉杆轴423活动安装在空心轴413的内孔中,其上端从空心轴413内孔上端的孔口伸出,并与气缸b422的活塞杆固定连接,其下端头设有第二铰接部4231。连杆424的上端头和下端头分别设有第三铰接部4241和第四铰接部4242,连杆424通过第三铰接部4241与拉杆轴423的第二铰接部4231铰接。
27.刷头包括j形刷板51和粘接固定在j形刷板51上的刷毛52。j形刷板51包括依次连接的竖板段511、弧形过渡板段512和横板段513。竖板段511与横板段513之间的夹角为90
°
,竖板段511的端部设有第五铰接部514,竖板段511的中部设有第六铰接部515。j形刷板51通过第五铰接部514与连杆424的第四铰接部4242铰接,j形刷板51通过第六铰接部515与空心轴413的第一铰接部4131铰接。
28.优选,料桶定位套件包含的四组料桶定位组件按照顺时针的顺序依次命名为一组、二组、三组和四组。其中,一组和四组的料桶定位组件中的定位块23相互正对,二组和三组的料桶定位组件中的定位块23相互正对,一组和二组的料桶定位组件中的气缸a21相互平行布置,三组和四组的料桶定位组件中的气缸a21相互平行布置。这种布置方式相比于对角线正对的布置方式能有效缩短气缸的活塞行程,缩小电解液桶内壁除垢装置的整体占用
空间,有利于气缸活塞行程的精准控制。
29.优选,导轨31的数量为两条,两条导轨31相互平行布置,相应的,滑块32的数量为两块,两个滑块32各与一条导轨31滑动配合。该结构相比单条导轨与单个滑块滑动配合的结构能更好的保持升降框架的移动稳定性。
30.优选,空心轴413下端设有供连杆424伸出的避让缺口4132。该结构使得连杆424具有更大的转动角度,进而使刷头在竖直平面内的转动角度更大。
31.优选,竖向转动组件还包括安装在气缸b422上端的导电导气滑环425。
32.简述刷头的动作控制原理:刷头转动控制机构用于控制刷头在竖直平面内转动和/或水平面内转动。刷头升降控制机构通过控制刷头转动控制机构竖直升降,从而间接控制刷头竖直升降。
33.刷头在水平面内转动的控制过程如下:启动电机a411,电机a411依次带动减速机412的蜗杆和蜗轮转动,再带动中间轴413、气缸座421、气缸b422、拉杆轴423和连杆424同步在水平面内转动,最后由连杆424带动刷头在水平面内转动。
34.刷头竖直平面内转动的控制过程如下:启动气缸b422,气缸b422通过活塞的伸缩带动拉杆轴423做竖直方向的伸缩移动,拉杆轴423通过连杆424带动刷头绕j形刷板51的第六铰接部515在竖直平面内转动,进而使刷头在竖直状态和水平状态之间切换,当刷头处在竖直状态时,j形刷板51的竖板段511呈竖直状态(平行于拉杆轴423),当刷头处在水平状态时,j形刷板51的竖板段511呈水平状态(垂直于拉杆轴423)。
35.刷头竖直升降的控制过程如下:启动电机b343,电机b343通过减速器344带动丝杆341转动,丝杆341转动带动螺母342、升降框架33、刷头转动控制机构和刷头同步做竖直升降运动。
36.简述本发明的工作过程:高效便捷的电解液桶内壁除垢装置用于去除电解液桶的桶体内壁上附着的污垢,所述电解液桶包括桶体61和桶盖62;桶体61呈圆柱形,其上端中心处设有开口611;桶盖62盖设在桶体61上端开口处。
37.除垢操作之前,高效便捷的电解液桶内壁除垢装置处于初始状态,在初始状态下:a、料桶定位套件中所有气缸a21的活塞均处于缩回状态;b、升降框架33处在其运动行程的最上端;c、刷头转动至竖直状态。
38.除垢操作如下:s01,装载电解液桶:将待除垢的电解液桶的桶盖62取下,桶体61放置在机架1底部的料桶承载面上,并推送到料桶定位套件的定位圈中,此时,桶体61整体位于机架1下部的料桶容纳区间12中;然后,料桶定位套件中所有的气缸a21的活塞同步伸出,使定位圈逐渐缩小,最终,料桶定位套件中所有的定位块23均与电解液桶的桶体61外壁相抵,将电解液桶的桶体61定位在料桶容纳区间12的中心区域,此时,刷头位于桶体61上端开口611的正上方。
39.s02:刷头插入桶体内腔:电机b343启动,电机b343通过减速器344带动丝杆341转动,丝杆341转动带动螺母342、升降框架33、刷头转动控制机构和刷头同步竖直向下移动,当刷头通过桶体61上端开口611完全插入桶体61内腔后,电机b343停止运行。
40.s03:刷头转动至水平状态:气缸b422启动,气缸b422的活塞的伸出,带动拉杆轴
423做竖直向下移动,拉杆轴423通过连杆424带动刷头绕j形刷板51的第六铰接部515在竖直平面内转动,使刷头从竖直状态转动至水平状态,此时,j形刷板51的横板段513上的刷毛52与桶体内腔侧壁面的最上端接触;本步骤中,当刷头处在竖直状态时,j形刷板51的竖板段511平行于拉杆轴423,当刷头处在水平状态时,j形刷板51的竖板段511垂直于拉杆轴423。
41.s04,桶体内壁除垢:a、电机a411启动,电机a411通过减速机412带动空心轴413转动,空心轴413转动时带动竖向转动组件和刷头同步做水平面上的转动;b、电机b343启动,电机b343通过减速器344带动丝杆341转动,丝杆341转动带动螺母342、升降框架33、刷头转动控制机构和刷头同步竖直向下移动,此时,刷头呈现一边转动一边下降的姿态,为桶体61内侧壁从上至下进行除垢;当刷头下降至与桶体61内腔底部时,电机b343暂停运行t秒,使刷头为桶体61内腔底面进行除垢;c、电机b343启动,电机b343通过减速器344带动丝杆341转动,丝杆341转动带动螺母342、升降框架33、刷头转动控制机构和刷头同步竖直向上移动,此时,刷头呈现一边转动一边上升的姿态,为桶体61内侧壁从下至上进行除垢;当刷头上升至桶体61内腔最上端时,电机b343停止运行;本步骤中,时间t取值为5~30;本步骤中,刷头的转动速度为30~60转/min;本步骤中,刷头上升或下降速度为10~30cm/min。
42.s05,刷头转动至竖直状态:气缸b422启动,气缸b422的活塞的缩回,带动拉杆轴423做竖直向上移动,拉杆轴423通过连杆424带动刷头绕j形刷板51的第六铰接部515在竖直平面内转动,使刷头从水平状态转动至竖直状态;本步骤中,当刷头处在竖直状态时,j形刷板51的竖板段511平行于拉杆轴423,当刷头处在水平状态时,j形刷板51的竖板段511垂直于拉杆轴423。
43.s06,刷头退出桶体内腔:电机b343启动,电机b343通过减速器344带动丝杆341转动,丝杆341转动带动螺母342、升降框架33、刷头转动控制机构和刷头同步竖直向上移动,使刷头通过桶体上端开口完全退出桶体内腔,当升降框架33上升至其运动行程的最上端时,电机b343停止运行。
44.s07,卸载电解液桶:料桶定位套件中所有的气缸a21的活塞同步缩回,使料桶定位套件中所有的定位块23均与电解液桶的桶体61外壁脱离,并在料桶容纳区间12的两端形成可供桶体61推出的出口;最后,将桶体61从出口推出即可。
45.截止到本步骤,已经完成电解液桶的桶体内壁除垢,后续再对桶体内腔进行冲洗,即可轻松去除桶内杂质。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1