光伏组件清洗方法、装置及灰尘检测方法与流程
1.本发明涉及光伏组件清洗技术领域,尤其涉及一种光伏组件清洗方法、装置及灰尘检测方法。
背景技术:
2.光伏组件是光伏电站中最重要的设备,光伏组件安装于室外,将太阳能转化为电能,灰尘附着在光伏组件表面会对光线产生遮挡、吸收及反射作用,影响光伏发电效率。
3.在光伏电站运维过程中,通过计算光伏电站的积灰程度指导光伏组件清洗,改善光伏发电效率。在现有技术中,光伏电站设置清洗模块清洗光伏组件,通过采集干净状态与积灰状态的光伏组件的电气参数,计算光伏电站的积灰程度。
4.现有的清洗模块通常采用喷淋钢管或者扁嘴喷头的结构,其存在以下问题:喷淋钢管喷淋出来的水流冲击力小,清洗效果差,水流裹挟着灰尘从光伏组件上端流向下端,灰尘的密度大于水的密度,在光伏组件下端沉积,形成平行于组件边框的沙滩沉积带,沙滩沉积带会造成光伏组件的电气参数降低,导致无法准确计算电站的积灰程度;采用扁嘴喷头清洗光伏组件,需要配合加压装置,借助水柱冲击力将光伏组件清洗干净,为了使光伏组件保持干净,需要每日清洗,用水量大,导致运维成本增加。
技术实现要素:
5.本发明提供一种光伏组件清洗方法、装置及灰尘检测方法,以实现在清洗光伏组件时通过增大光伏组件的倾角避免灰尘堆积残留,改善清洗效果。
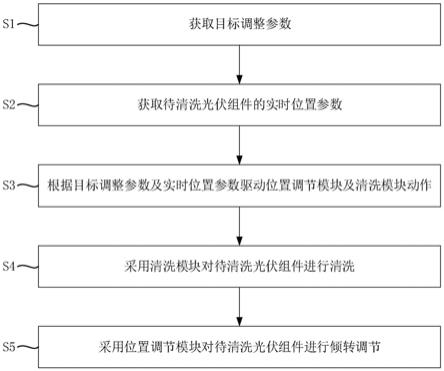
6.第一方面,本发明实施例提供了一种光伏组件清洗方法,包括以下步骤:获取目标调整参数,所述目标调整参数包括清洗启动时间和目标位置参数;获取待清洗光伏组件的实时位置参数;根据所述目标调整参数及所述实时位置参数驱动位置调节模块及清洗模块动作;采用位置调节模块对待清洗光伏组件进行倾转调节;采用清洗模块对所述待清洗光伏组件进行清洗。
7.第二方面,本发明实施例还提供了一种光伏组件清洗装置,用于上述光伏组件清洗方法,所述清洗装置包括:位置采样模块、位置调节模块、清洗模块和控制模块;所述位置采样模块,用于获取待清洗光伏组件的实时位置参数;所述控制模块,用于获取目标调整参数,并根据所述目标调整参数及所述实时位置参数驱动所述位置调节模块及所述清洗模块动作;所述位置调节模块,用于对待清洗光伏组件进行倾转调节;所述清洗模块,用于对所述待清洗光伏组件进行清洗。
8.第三方面,本发明实施例还提供了一种灰尘检测方法,包括:采用上述光伏组件清洗方法对第一光伏组件进行清洗;同步采集所述第一光伏组件的第一电气参数和第二光伏组件的第二电气参数,其中,所述第二光伏组件的清洗频率与光伏电站的清洗频率同步;根据所述第一电气参数和所述第二电气参数确定所述光伏电站的灰尘检测结果。
9.本发明实施例提供的光伏组件清洗装置及灰尘检测方法,执行光伏组件清洗方
法,该清洗方法通过获取目标调整参数及待清洗光伏组件的实时位置参数;根据目标调整参数及实时位置参数驱动位置调节模块及清洗模块动作;采用位置调节模块对待清洗光伏组件进行倾转调节;采用清洗模块对待清洗光伏组件进行清洗,解决了现有的清洗模块清洗效果差、用水量大的问题,实现在清洗光伏组件时增大光伏组件的倾角,避免灰尘在光伏组件堆积残留,改善清洗效果,减少清洗用水量,降低电站运维成本。
附图说明
10.图1是本发明实施例一提供的一种光伏组件清洗方法的流程图;
11.图2是本发明实施例一提供的另一种光伏组件清洗方法的流程图;
12.图3是本发明实施例一提供的又一种光伏组件清洗方法的流程图;
13.图4是本发明实施例一提供的一种光伏组件清洗方法的工作原理的示意图;
14.图5是本发明实施例一提供的又一种光伏组件清洗方法的流程图;
15.图6是本发明实施例二提供的一种光伏组件清洗装置的结构示意图;
16.图7是本发明实施例二提供的另一种光伏组件清洗装置的结构示意图;
17.图8是本发明实施例二提供的一种光伏组件清洗装置的安装结构示意图;
18.图9是本发明实施例二还提供的一种光伏组件清洗装置的立体图;
19.图10是本发明实施例三提供的一种灰尘检测方法的流程图;
20.图11是本发明实施例三提供的另一种灰尘检测方法的流程图。
具体实施方式
21.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
22.实施例一
23.图1是本发明实施例一提供的一种光伏组件清洗方法的流程图,本实施例可适用于在用水量较少的情况下对待清洗光伏组件进行清洗的应用场景,该方法可由具有清洗及位置调节功能的软件程序和/或功能模块来执行,典型地,功能模块包括位置检测模块、位置调节模块和清洗模块。
24.在本实施例中,待清洗光伏组件可为光伏电站中用于执行灰尘检测的光伏组件,采用本发明实施例的光伏组件清洗方法对上述待清洗光伏组件进行清洗,以使待清洗光伏组件始终保持干净。
25.如图1所示,该光伏组件清洗方法具体包括以下步骤:
26.步骤s1:获取目标调整参数,目标调整参数包括清洗启动时间和目标位置参数。
27.其中,清洗启动时间可为对光伏组件进行抬升或者倾转操作的启动时间,目标位置参数可为对光伏组件进行抬升或者倾转操作的移动上限位置,清洗启动时间和目标位置参数可由用户根据实际需求进行设置,对此不作限制。
28.可选地,目标位置参数包括下述至少一种:目标倾角参数和目标位移参数。
29.其中,目标倾角参数可为光伏组件的移动上限位置相对于水平面的目标倾转角度;目标位移参数可为光伏组件从初始位置抬升至移动上限位置对应的目标竖直高度增
量。
30.步骤s2:获取待清洗光伏组件的实时位置参数。
31.可选地,实时位置参数包括下述至少一种:初始倾角参数、初始高度参数、实时倾角参数、实时高度参数或者位移增量参数。
32.其中,初始倾角参数为待清洗光伏组件未执行抬升或者倾转操作的状态下,相对于水平面的夹角;初始高度参数为待清洗光伏组件未执行抬升或者倾转操作的状态下,光伏组件顶部边沿与水平基准面之间的竖直高度;实时倾角参数为待清洗光伏组件执行抬升或者倾转操作后,相对于水平面的夹角;实时高度参数为待清洗光伏组件执行抬升或者倾转操作后,光伏组件顶部边沿与水平基准面之间的竖直高度;位移增量参数为光伏组件上任一参考点的倾角或者竖直高度变化量。
33.在本步骤中,可采用位置检测模块采集实时位置参数,典型地,位置检测模块可包括倾角传感器和/或位移传感器,倾角传感器用于采集待清洗光伏组件的初始倾角参数和实时倾角参数,位移传感器用于采集待清洗光伏组件的初始高度参数和实时高度参数。
34.步骤s3:根据目标调整参数及实时位置参数驱动位置调节模块及清洗模块动作。
35.其中,位置调节模块可为具有抬升或者拉拽功能的执行机构;清洗模块可为具有喷水功能的喷嘴及辅助机构。
36.在本步骤中,可根据目标倾角参数输出抬升驱动信号,驱动位置调节模块执行抬升操作,并根据目标倾角参数输出喷水驱动信号,驱动清洗模块执行喷水操作;或者,根据目标位移参数输出抬升驱动信号,驱动位置调节模块执行抬升操作,并根据目标位移参数输出喷水驱动信号,驱动清洗模块执行喷水操作。
37.步骤s4:采用清洗模块对待清洗光伏组件进行清洗。
38.可选地,清洗模块可采用恒压模式或者加压模式执行喷水操作;在恒压模式下,清洗模块的喷水可从待清洗光伏组件的顶部边沿淋浇待清洗光伏组件;在加压模式下,清洗模块可通过调节加压压力改变喷水在待清洗光伏组件上的落点。
39.步骤s5:采用位置调节模块对待清洗光伏组件进行倾转调节。
40.其中,倾转调节包括增大或者减小待清洗光伏组件的倾角。
41.可选地,位置调节模块可采用推杆或者拉拽方式对待清洗光伏组件进行倾转调节,其中,推杆可采用液压驱动或者电动驱动方式,对此不作限制。
42.可选地,位置调节模块与待清洗光伏组件之间可设置至少一个调节支撑点,每个调节支撑点独立运行、互为冗余,有利于提高位置调节动作可靠性。
43.在本实施例中,对上述步骤s4及步骤s5的先后顺序不作限制,可驱动清洗模块对待清洗光伏组件进行清洗,并同步驱动位置调节模块增大待清洗光伏组件的倾角,以使抬升操作与喷水操作同步进行;或者,先驱动清洗模块对待清洗光伏组件执行喷水操作,在喷水一段时间后,再驱动位置调节模块增大待清洗光伏组件的倾角;或者,先驱动位置调节模块增大待清洗光伏组件的倾角,再驱动清洗模块对待清洗光伏组件执行喷水操作。
44.具体地,可采用控制模块调度光伏电站的运维清洗,控制模块与位置检测模块、位置调节模块和清洗模块连接。在清洗启动时间,光伏电站启动清洗作业,控制模块接收位置检测模块采集的待清洗光伏组件的初始位置参数,并驱动位置调节模块增大待清洗光伏组件的倾角,在倾角增大过程中,控制模块根据目标位置参数及实时位置参数确定倾转动作
停止时间。在清洗模块对待清洗光伏组件喷水时,水灰混合物从光伏组件的顶部边沿流向光伏组件的下端,控制模块驱动位置调节模块增大光伏组件的倾角,以使水灰混合物在重力作用下更容易跨越光伏组件的底部边沿,解决了现有的清洗模块清洗效果差、用水量大的问题,通过在清洗光伏组件时增大光伏组件的倾角,避免灰尘在光伏组件堆积残留,改善清洗效果,减少清洗用水量,降低电站运维成本。
45.可选地,图2是本发明实施例一提供的另一种光伏组件清洗方法的流程图,在图1的基础上,示出了一种获取目标调整参数的具体实施方式,而非对上述步骤的限定。
46.如图2所示,该光伏组件清洗方法包括以下步骤:
47.步骤s101:获取环境温度。
48.其中,环境温度可为采样时刻待清洗光伏组件所在环境的室外温度,该室外温度可通过实测采样确定,或者根据历史记录确定,对此不作限制。
49.步骤s102:根据环境温度确定清洗启动时间。
50.步骤s103:获取目标位置参数,将清洗启动时间及目标位置参数确定为目标调整参数。
51.步骤s2:获取待清洗光伏组件的实时位置参数。
52.步骤s3:根据目标调整参数及实时位置参数驱动位置调节模块及清洗模块动作。
53.步骤s4:采用清洗模块对待清洗光伏组件进行清洗。
54.步骤s5:采用位置调节模块对待清洗光伏组件进行倾转调节。
55.具体地,上述步骤s101至步骤s103示出了一种获取清洗启动时间的具体实施方式,在启动清洗作业之前,可通过温度采样模块采集环境温度,若环境温度小于或者等于预设温度下限阈值,则将清洗启动时间确定为第一预设时间,例如,第一预设时间可为10:00至14:00时间段内的任一时间;若环境温度大于预设温度下限阈值,则将清洗启动时间确定为第二预设时间,例如,第二预设时间可为0:00至05:00时间段内的任一时间。
56.在清洗启动时间,控制模块驱动清洗模块启动,对待清洗光伏组件执行喷水操作,同时,控制模块通过位置检测模块采集待清洗光伏组件的初始位置参数,在清洗模块喷水启动的同时,控制模块驱动位置调节模块增大待清洗光伏组件的倾角;或者,在清洗模块喷水一段时间后,控制模块驱动位置调节模块增大待清洗光伏组件的倾角。由此,本发明通过合理配置清洗作业时间,避免清洗作业占用光伏发电时间,有利于提高光伏系统发电效率。
57.可选地,本发明实施例一还提供的另一种获取清洗启动时间的具体方法,包括:获取预设时间表,并根据预设时间表确定清洗启动时间,其中,预设时间表可为清洗作业时间与光伏组件安装地区之间的对应关系列表,或者,清洗作业时间与光伏组件规格类型之间的对应关系列表,用户可根据实际需要及经验调整对应关系列表中的清洗作业时间的具体数值,对此不作限制。
58.可选地,图3是本发明实施例一提供的又一种光伏组件清洗方法的流程图。
59.如图3所示,该光伏组件清洗方法还包括以下步骤:
60.步骤s104:获取待清洗光伏组件的电气参数。
61.可选地,电气参数包括下述至少一项:瞬时短路电流或者瞬时功率。
62.步骤s105:根据电气参数确定清洗启动时间。
63.步骤s106:获取目标位置参数,将清洗启动时间及目标位置参数确定为目标调整
参数。
64.步骤s2:获取待清洗光伏组件的实时位置参数。
65.步骤s3:根据目标调整参数及实时位置参数驱动位置调节模块及清洗模块动作。
66.步骤s4:采用清洗模块对待清洗光伏组件进行清洗。
67.步骤s5:采用位置调节模块对待清洗光伏组件进行倾转调节。
68.具体地,上述步骤s104至步骤s105示出了另一种获取清洗启动时间的具体实施方式,在启动清洗作业之前,可通过光伏性能检测模块采集待清洗光伏组件的电气参数,例如,该电气参数可为瞬时短路电流或者瞬时功率,控制模块根据瞬时短路电流或者瞬时功率判断待清洗光伏组件表面是否存在积灰,若采样时刻的瞬时短路电流低于当前光照度下的理论输出电流,或者采样时刻的瞬时功率低于当前光照度下的理论输出功率,则判定待清洗光伏组件表面存在积灰,将当前采样时刻确定为清洗启动时间。由此,本发明通过检测光伏组件表面的电气参数触发单个光伏组件的清洗作业,提高清洗作业的灵活性,避免光伏组件积灰影响发电,有利于提高光伏系统发电效率。
69.可选地,该光伏组件清洗方法还包括以下步骤:采用加压模块对清洗模块的出水水流进行加压,形成至少一条喷水轨迹,喷水轨迹在待清洗光伏组件的落点位置与待清洗光伏组件的底部边沿之间具有预设距离,其中,待清洗光伏组件的底部边沿为光伏组件背离出水喷头固定位置的一侧的边沿;预设距离与加压模块的加压压力负相关。
70.具体地,可通过调节加压模块的加压压力改变喷水轨迹在待清洗光伏组件的落点位置,在清洗模块执行喷水时,控制模块可通过光伏性能检测模块采集待清洗光伏组件的电气参数,根据采样时刻的电气参数判断是否需要启动清洗模块的加压模式,若根据采样时刻的电气参数判断光伏组件表面积灰较多,或者,采用恒压模式清洗一段时间后,待清洗光伏组件表面仍然存在积灰,则控制模块判定需要启动清洗模块的加压模式。在加压模式下,喷水轨迹在待清洗光伏组件的落点位置可调整。
71.可选地,图4是本发明实施例一提供的一种光伏组件清洗方法的工作原理的示意图,示出了一种通过加压模式下的清洗方法。
72.如图4所示,在采用位置调节模块对待清洗光伏组件进行倾转调节的同时,控制模块可调节加压模块的加压压力,形成多条喷水轨迹,例如,多条喷水轨迹包括第一喷水轨迹a1、第二喷水轨迹a2、
……
、第n喷水轨迹an,其中,n为大于等于1的正整数,箭头方向为n条喷水轨迹的移动方向,按照时间先后,n条喷水轨迹在待清洗光伏组件的落点位置从待清洗光伏组件的顶部边沿逐步推移至底部边沿,清洗模块下每个喷水轨迹的喷水持续时间可设置为相同或者不相同,对此不作限制。由此,本发明通过在清洗光伏组件时增大光伏组件的倾角及增大出水水压,有利于减小供水模块的体积,减小加压模块的功率,降低运维成本,避免灰尘在光伏组件堆积残留,有利于提高光伏组件的发电效率。
73.可选地,图5是本发明实施例一提供的又一种光伏组件清洗方法的流程图。
74.如图5所示,在完成待清洗光伏组件的清洗之后,该光伏组件清洗方法还包括:
75.步骤s6:根据实时位置参数对待清洗光伏组件进行归位调节。
76.在本步骤中,可根据倾角参数或者高度参数驱动位置调节模块沿第一方向运行,第一方向与执行抬升操作的方向相反,实现对待清洗光伏组件的位置调节。
77.具体地,在清洗启动时间,可采用倾角传感器采集的待清洗光伏组件的初始倾角
参数a0,位置调节模块启动对待清洗光伏组件的抬升操作,在待清洗光伏组件的倾角增大的过程中,倾角传感器采集待清洗光伏组件的实时倾角参数,若实时倾角参数等于用户预设的目标倾角角度,则控制模块驱动位置调节模块停止动作,以使待清洗光伏组件保持在目标倾角参数直至清洗完成;在清洗完成后,控制模块驱动位置调节模块反向动作,倾角传感器采集待清洗光伏组件的实时倾角参数,若待清洗光伏组件的实时倾角参数等于初始倾角参数a0,则控制模块驱动位置调节模块停止动作,以使待清洗光伏组件回到抬升操作之前的原始位置。
78.在待清洗光伏组件的倾角增大的过程中,还可采用位移传感器记录待清洗光伏组件的实时高度参数变化量,若竖直高度偏移量等于目标竖直高度增量,则控制模块驱动位置调节模块停止动作,以使待清洗光伏组件保持在目标倾角参数直至清洗完成;在清洗完成后,控制模块驱动位置调节模块反向动作,位移传感器记录待清洗光伏组件的实时高度参数变化量,若竖直高度偏移量等于目标竖直高度增量,则控制模块驱动位置调节模块停止动作,以使待清洗光伏组件回到抬升操作之前的原始位置。
79.由此,本发明通过在清洗作业时增大光伏组件的倾角,在清洗完成后恢复光伏组件的倾角,有利于避免光伏组件倾角变化影响发电效率。
80.实施例二
81.本发明实施例二还提供了一种光伏组件清洗装置,该装置可执行本发明任意实施例所提供的光伏组件清洗方法,具备执行方法相应的功能模块和有益效果。
82.图6是本发明实施例二提供的一种光伏组件清洗装置的结构示意图。
83.如图6所示,该光伏组件清洗装置00包括:位置采样模块10、位置调节模块20、清洗模块30和控制模块40,控制模块40与位置采样模块10、位置调节模块20及清洗模块30连接。位置采样模块10,用于获取待清洗光伏组件的实时位置参数;控制模块40,用于获取目标调整参数,并根据目标调整参数及实时位置参数驱动位置调节模块20及清洗模块30动作;位置调节模块20,用于对待清洗光伏组件01进行倾转调节;清洗模块30,用于对待清洗光伏组件01进行清洗。
84.可选地,参考图6所示,清洗模块30可包括清洗开关301、清洗喷嘴302和供水单元303,清洗开关301设置于清洗喷嘴302的入水口和供水单元303的供水口之间,清洗开关301的控制端与控制模块40连接,在达到清洗启动时间时,控制模块40对清洗开关301发出启动控制信号,以使供水单元303的供水口的水流经清洗开关301进入清洗喷嘴302,清洗喷嘴302对待清洗光伏组件01进行清洗。
85.可选地,清洗开关301可为电磁阀。
86.可选地,该光伏组件清洗装置00还包括:温度采样模块,温度采样模块用于获取环境温度,并将采集到的环境温度传输至控制模块40,以使控制模块40根据环境温度确定清洗启动时间。
87.可选地,该光伏组件清洗装置00还包括:光伏性能检测模块,光伏性能检测模块用于获取待清洗光伏组件的电气参数,并将采集到的电气参数传输至控制模块40,以使控制模块40根据电气参数确定清洗启动时间。
88.可选地,电气参数包括下述至少一项:瞬时短路电流或者瞬时功率。
89.可选地,目标位置参数包括:目标倾角参数或者目标位移参数中的任一种;实时位
置参数包括下述至少一种:初始倾角参数、初始高度参数、实时倾角参数或者实时高度参数。
90.可选地,控制模块40根据实时位置参数驱动位置调节模块20沿第一方向运行,第一方向与执行抬升操作的方向相反,对待清洗光伏组件01进行归位调节。
91.图7是本发明实施例二提供的另一种光伏组件清洗装置的结构示意图。
92.可选地,如图7所示,该清洗模块30还包括:加压模块304,加压模块304用于对清洗模块30的出水水流进行加压,形成至少一条喷水轨迹,喷水轨迹可参考图4,喷水轨迹在待清洗光伏组件的落点位置与待清洗光伏组件的底部边沿之间具有预设距离;预设距离与加压模块的加压压力负相关。
93.参考图7所示,加压模块304可设置于供水单元303的供水口与清洗开关301的入水口之间。
94.可选地,位置调节模块20可包括推杆机构和/或拉拽机构。
95.可选地,图8是本发明实施例二提供的一种光伏组件清洗装置的安装结构示意图。
96.参考图8所示,位置调节模块20可包括第一支撑部201和第二支撑部202,其中,第一支撑部201可为固定高度支撑杆,第二支撑部202可为推杆式顶升机构,第二支撑部202可采用电动驱动或者液压驱动方式,对此不作限制。
97.继续参考图8所示,定义初始位置为p,移动上限位置为p',在清洗喷嘴302对待清洗光伏组件01喷水时,第二支撑部202可驱动待清洗光伏组件01从初始位置p抬升至移动上限位置p',在清洗完成后,第二支撑部202可驱动待清洗光伏组件01从移动上限位置p'回落至初始位置p。
98.可选地,图9是本发明实施例二还提供的一种光伏组件清洗装置的立体图。
99.如图9所示,该光伏组件清洗装置00还包括:导流模块50,导流模块50设置于待清洗光伏组件01背离清洗喷嘴302的一侧,导流模块50用于排出清洗产生的水灰混合物。
100.参考图9所示,该导流模块50可为导流器。
101.实施例三
102.本发明实施例三还提供了一种灰尘检测方法,本发明执行上述光伏组件清洗方法,具备执行上述方法的有益效果和功能模块。
103.图10是本发明实施例三提供的一种灰尘检测方法的流程图。
104.如图10所示,该灰尘检测方法具体包括以下步骤:
105.步骤s10:采用上述光伏组件清洗方法对第一光伏组件进行清洗,具体包括以下步骤:
106.步骤s110:获取第一光伏组件的目标调整参数。
107.步骤s120:获取第一光伏组件的实时位置参数。
108.步骤s130:根据目标调整参数及实时位置参数驱动位置调节模块及清洗模块动作。
109.步骤s140:采用清洗模块对第一光伏组件进行清洗。
110.步骤s150:采用位置调节模块对第一光伏组件进行倾转调节。
111.步骤s20:采用光伏性能检测模块同步采集第一光伏组件的第一电气参数和第二光伏组件的第二电气参数,其中,第二光伏组件的清洗频率与光伏电站的清洗频率同步。
112.步骤s30:根据第一电气参数和第二电气参数确定光伏电站的灰尘检测结果。
113.在本实施例中,第一光伏组件可为用于执行灰尘检测的干净组件,第二光伏组件可为用于执行灰尘检测的灰尘组件,在进行灰尘检测时,同步检测第一光伏组件的第一电气参数wa及第二光伏组件的第二电气参数wb,通过计算第一电气参数wa和第二电气参数wb之间的比值,确定光伏电站的积灰程度。
114.具体地,在执行灰尘检测时,不对第二光伏组件进行清洗,仅采用上述清洗方法清洗第一光伏组件,以使第一光伏组件保持干净,第二光伏组件保持与光伏电站同步的清洗频率。
115.需要说明的是,在位置调节模块动作时,光伏性能检测模块不采集第一电气参数wa和第二电气参数wb,或者,即使采集了第一电气参数wa和第二电气参数wb也不参与计算积灰程度。
116.可选地,电气参数包括下述至少一项:瞬时短路电流、累计短路电流、瞬时功率或者累计发电量。
117.其中,累计短路电流为采样区间内多个瞬时短路电流之和,累计发电量为采样区间内多个瞬时功率之和。
118.需要说明的是,在使用累计短路电流或者累计发电量作为电气参数,计算光伏电站的积灰程度时,需要对参与计算的瞬时短路电流或者瞬时功率进行滤波,剔除异常数据,有利于提高灰尘检测结果的准确度。
119.可选地,图11是本发明实施例三提供的另一种灰尘检测方法的流程图。
120.如图11所示,该灰尘检测方法还包括以下步骤:
121.步骤s10:采用上述光伏组件清洗方法对第一光伏组件进行清洗,具体包括以下步骤:
122.步骤s110:获取第一光伏组件的目标调整参数。
123.步骤s120:获取第一光伏组件的实时位置参数。
124.步骤s130:根据目标调整参数及实时位置参数驱动位置调节模块及清洗模块动作。
125.步骤s140:采用清洗模块对第一光伏组件进行清洗。
126.步骤s150:采用位置调节模块对第一光伏组件进行倾转调节。
127.步骤s160:在第一光伏组件清洗完成后启动计时。
128.步骤s170:判断计时时间是否达到预设等待时间。
129.若计时时间达到预设等待时间,则执行步骤s20;否则,返回执行步骤s160。
130.步骤s20:同步采集第一光伏组件的第一电气参数和第二光伏组件的第二电气参数,其中,第二光伏组件的清洗频率与光伏电站的清洗频率同步。
131.步骤s30:根据第一电气参数和第二电气参数确定光伏电站的灰尘检测结果。
132.可选地,可设置预设等待时间为30分钟,即言,在清洗模块喷水停止后,间隔30分钟再同步采集第一光伏组件的第一电气参数和第二光伏组件的第二电气参数,有利于水灰混合物充分流出,避免水灰混合物淤积在光伏组件表面影响灰尘检测结果。
133.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、
重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1