一种行走机构的制作方法
1.本实用新型涉及管道设备维护保养领域,具体涉及一种行走机构。
背景技术:
2.高附加值(运输管道、特殊用途管道)小管径(80
‑
400mm)的管内维护清洗防护处理是业内难题,这类管道对内壁物质的状态要求高,比如在更换运输物质时需要将上次运输物质清洗干净,又如运输过程产生的顽固杂质会对整体系统的运行带来风险,故需要定期对管内进行清洗防护作业。
3.为此需要借助对应的管道机器人进行作业,传统管道机器人所采用的行走设备具有三组行走轮毂,且三组行走轮毂的张力通过三组弹簧压缩独立控制,从而实现多管径自适应,但由于弹簧数量多,各自压力不一致,无法确保机器人在管道内部行走过程的稳定性,易偏心造成机构卡死。
技术实现要素:
4.本实用新型所要解决的技术问题是提供一种行走机构,以克服上述现有技术中的不足。
5.本实用新型解决上述技术问题的技术方案如下:一种行走机构,包括:
6.机座,固定套装在轴杆上;
7.弹簧座,与轴杆配合同心;
8.弹簧,套设在轴杆上,且两端分别与弹簧座和轴杆背离机座的一端相固定;
9.多根主连杆,其一端与机座转动连接,另一端通过驱动机构连接主动轮;
10.多根副连杆,其一端与弹簧座转动连接,另一端转动设置从动轮,且中部对应与各主连杆中部转动连接。
11.本实用新型的有益效果是:
12.弹簧座可沿轴杆前后滑动,若滑动过程中有对弹簧进行压缩,那么弹簧对弹簧座提供反作用力,该轴向力使主连杆、副连杆之间的夹角发生变化,使得安装于副连杆末端的从动轮和安装于主连杆末端的主动轮拥有径向外力,该径向外力作用于管道内壁上为行走提供摩擦力,同时通过该弹簧可以使得行走机构能够应用于多种不同内径的管道中,采用单个弹簧控制,对外张力相同,在管道行走过程中保证了行走机构的轴心稳定,避免出现卡死情况。
13.在上述技术方案的基础上,本实用新型还可以做如下改进。
14.进一步,驱动机构包括:
15.电机座,固定于主连杆的端部;
16.电机,设置于电机座上;
17.轴承总成,设置于电机座上;
18.动力轴,与轴承总成中的轴承的内圈相固定,其两端分别固定主动轮;
19.传动链,其分别与动力轴和电机的输出轴相连。
20.采用上述进一步的有益效果为:结合传动链传动实现驱动单元独立控制,设备故障互不影响,配件易更换。
21.进一步,传动链包括:
22.主动斜齿轮,固定于电机的输出轴上;
23.从动斜齿轮,固定于动力轴上,并与主动斜齿轮相啮合。
24.采用上述进一步的有益效果为:结合斜齿轮传动实现驱动单元独立控制,设备故障互不影响,配件易更换,斜齿轮传动运行更加平稳。
25.进一步,主连杆的数量为三根,副连杆的数量为六根,与每根主连杆相连的副连杆的数量为两根。
26.采用上述进一步的有益效果为:使得行走更加平稳。
27.进一步,弹簧座通过衬套与轴杆配合同心。
28.采用上述进一步的有益效果为:使得弹簧座能更好的与轴杆滑动配合,避免卡死。
附图说明
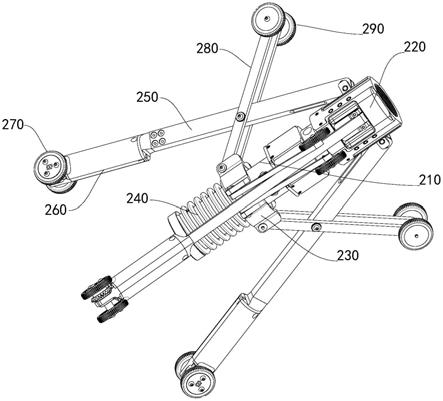
29.图1为本实用新型所述行走机构的结构图;
30.图2为本实用新型所述驱动机构的结构图。
31.附图中,各标号所代表的部件列表如下:
32.210、轴杆,220、机座,230、弹簧座,240、弹簧,250、主连杆,260、驱动机构,261、电机座,262、电机,263、轴承总成,264、动力轴,265、主动斜齿轮,266、从动斜齿轮,270、主动轮,280、副连杆,290、从动轮。
具体实施方式
33.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
34.实施例1
35.如图1、图2所示,一种行走机构,包括:
36.轴杆210、机座220、弹簧座230、弹簧240、主连杆250、副连杆280、驱动机构260、主动轮270和从动轮290;
37.机座220固定套装在轴杆210上;
38.弹簧座230与轴杆210配合同心;
39.弹簧240套设在轴杆210上,弹簧240处在弹簧座230背离机座220的一侧,且弹簧240的两端分别与弹簧座230和轴杆210相固定;
40.主连杆250的一端与机座220转动连接,主连杆250的另一端通过驱动机构260连接主动轮270,驱动机构260用以驱动主动轮270转动;
41.副连杆280的一端与弹簧座230转动连接,副连杆280的另一端转动设置从动轮290,而且副连杆280的中部与主连杆250的中部转动连接。
42.弹簧座230可沿轴杆210前后滑动,若滑动过程中有对弹簧240进行压缩,那么弹簧240对弹簧座230提供反作用力,该轴向力使主连杆250、副连杆280之间的夹角发生变化,使
得安装于副连杆280末端的从动轮290和安装于主连杆250末端的主动轮270拥有径向外力,该径向外力作用于管道内壁上为机器人行走提供摩擦力,同时通过该弹簧240可以使得行走机构能够应用于多种不同内径的管道中,采用单个弹簧240控制,可以确保行走机构在管道内部行走过程的稳定性,避免出现卡死情况。
43.实施例2
44.如图1、图2所示,本实施例为在实施例1的基础上所进行的进一步优化,其具体如下:
45.驱动机构260包括:电机座261、电机262、轴承总成263、动力轴264和传动链;
46.电机座261固定于主连杆250的端部;
47.电机262设置于电机座261上;
48.轴承总成263设置于电机座261上;
49.动力轴264与轴承总成263中的轴承的内圈相固定,而动力轴264的两端分别固定两个主动轮270;
50.传动链分别与动力轴264和电机262的输出轴相连。
51.当电机262启动后,将会通过传动链促使动力轴264转动,而在动力轴264转动后,将会带动主动轮270转动,从而实现在管道内行走。
52.实施例3
53.如图1、图2所示,本实施例为在实施例2的基础上所进行的进一步优化,其具体如下:
54.传动链包括:主动斜齿轮265和从动斜齿轮266;
55.主动斜齿轮265固定于电机262的输出轴上;
56.从动斜齿轮266固定于动力轴264上,并且从动斜齿轮266与主动斜齿轮265相啮合。
57.当电机262启动后,将会通过主动斜齿轮265带动从动斜齿轮266转动,从而促使动力轴264转动,而在动力轴264转动后,将会带动主动轮270转动,从而实现在管道内行走。
58.当然,在实际设计过程中,并不排除采用链轮传动,带轮传动等作为传动链。
59.实施例4
60.如图1、图2所示,本实施例为在实施例1~3任一实施例的基础上所进行的进一步优化,其具体如下:
61.主连杆250的数量优选为三根,副连杆280的数量为六根,与每根主连杆250相连的副连杆280的数量为两根,通常情况下,所有主连杆250环绕轴杆210等角度分布,此时,三根主连杆250彼此之间的夹角为120
°
,当然,在实际设计过程中,并不排除主连杆250的数量为四根、五根、六根等,而副连杆280的数量则为主连杆250的数量的两倍。
62.实施例5
63.如图1、图2所示,本实施例为在实施例1~4任一实施例的基础上所进行的进一步优化,其具体如下:
64.弹簧座230通过衬套与轴杆210配合同心。
65.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围
内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1