自动清洁装置的制作方法
1.本实用新型涉及机械制造辅助设备领域,特别涉及一种自动清洁装置。
背景技术:
2.现有技术中,在印刷电路板组件(pcba)制造过程中,由于元件集成度和产品复杂程度的不断提升,对于制造过程清洁度的要求也越来越高。而pcba防静电周转筐作为pcba搬运的载体,其清洁度直接影响了pcba的质量。而传统过程中不论是使用气枪,手持式吸尘器还是无尘布擦拭,都存在着清洁效率低、效果差、异物粉尘二次污染等问题.
3.尤其在自动化高效制造过程中,大量的手动清洁工作不仅意味着劳动力的占用和效率的损失,更是伴随着大量的潜在操作风险和失效风险.
4.因此,有必要制作一种自动化清洁设备来辅助解决以上问题。
技术实现要素:
5.本实用新型需要解决的技术问题在于:第一,手动清洁时大量重复性的操作对于作业员体能是严峻的考验,大量重复且高强度的体力劳动给作业员的体能带来了巨大的考验,众多作业员反应不情愿从事该项劳动;第二,清洁效果差或发生二次污染导致pcba(印刷电路板组件)产品失效风险增加,手动清洁时,异物粉尘等极易转移到周围环境中造成二次污染,而且周转筐内相对狭小且复杂的结构对手动操作带来了不便并直接影响了清洁效果。
6.为了解决以上技术问题,本实用新型提供一种自动清洁装置,其目的在于能够减轻作业员的工作压力、确保良好的清洁效果、降低异物粉尘污染导致pcba失效的风险。
7.为了达到上述目的,本实用新型提供了一种自动清洁装置,包含:
8.移载平台,所述移载平台具有容置空间用以容置待清洁物品;
9.风淋仓,风淋仓中设置风淋气杆,风淋气杆对准所述待清洁物品设置,所述移载平台能够带动待清洁物品进入风淋仓,风淋仓在进行清洁工作时是密封的。
10.优选地,所述自动清洁装置,还包含:取放区;
11.移载平台初始位于取放区;在取放区处,将待清洁物品放置在移载平台中或将清洁完的物品从移载平台中取出;移载平台、取放区设置有取放开口;移载平台中设定放置范围,避免与风淋气杆干涉。
12.优选地,所述自动清洁装置,还包含:密封门;
13.风淋仓和取放区交界处、风淋仓面对初始位置的移载平台处具有进出开口;
14.移载平台与密封门相对位置固定连接;移载平台与密封门一起在风淋仓和取放区之间往复运动;当移载平台位于风淋仓中开始及正在进行清洁工作时,密封门与进出开口靠抵密封设置。
15.优选地,移载平台相对于相对位置不变设置的风淋仓和取放区运动的进出方向上,移载平台与密封门、或风淋仓与取放区相对固接部分、或固定连接有,沿进出方向伸缩
的伸缩缸机构或沿进出方向滑动的滑块滑轨机构或沿进出方向的导向轴孔机构。
16.优选地,所述伸缩缸机构包含缸体和伸缩杆,缸体中容纳压力流体,缸体与风淋仓相对固定连接,伸缩杆的第一端设有活塞在缸体中被往复推动,伸缩杆的第二端相对固定连接密封门;
17.所述滑块滑轨机构包含滑轨和滑块,滑块与滑轨相互嵌合且滑动连接;滑轨固定连接、铺设于风淋仓与取放区;滑块固定连接设置于移载平台处;
18.所述导向轴孔机构包含导向轴和导向孔,所述导向轴架设于取放区的框架处,所述导向孔设置于密封门上,导向轴穿设于导向孔内,密封门在导向轴上滑动。
19.优选地,所述伸缩缸机构包含电磁换向阀,所述电磁换向阀用以实现伸缩缸机构沿进出方向伸缩的往复运动。
20.优选地,移载平台在面对风淋仓及风淋气杆的面处开口;当移载平台位于风淋仓中开始及正在进行清洁工作时,风淋气杆插入至移载平台的容置空间内。
21.优选地,风淋气杆由移动气缸驱动沿着竖直方向运动;风淋气杆上设有出气头,出气头处喷出气体;气体为压缩的洁净干燥空气;气体将待清洁物品上的杂质吹离待清洁物品。
22.优选地,风淋仓具有主仓体,主仓体的下方设有集尘箱,集尘箱和主仓体之间设置具有通气孔的隔板,移载平台的底部设有通气孔,在集尘箱的下部设有集尘抽屉、对应风淋仓的外壳体处设有抽屉开口,集尘抽屉与抽屉开口之间抽动、密封连接,在进行清洁工作时,集尘抽屉与抽屉开口之间密封连接;将集尘抽屉从抽屉开口中抽出时,用以将收集的杂质倾倒处理。
23.优选地,所述自动清洁装置,还包含:
24.控制器,控制器包含启动开关;动作启动开关用以将控制器及执行机构所在总电路连接到电源;
25.伸缩缸机构,伸缩缸机构包含电磁换向阀,控制器控制连接电磁换向阀,移载平台初始位置位于取放区,伸缩缸机构带动移载平台朝向风淋仓运动;
26.密封门以及与密封门相对设置的进出开口,在密封门和进出开口处设有第一限位传感器,当密封门和进出开口靠抵密封时,第一限位传感器向控制器发出密封到位信号;
27.移动气缸,风淋气杆由移动气缸驱动,移动气缸由移动气缸开关阀、换向阀控制运动,风淋气杆通过风淋开关阀连接气体源,控制器控制连接移动气缸开关阀、换向阀、风淋开关阀;
28.清洁工作完毕后,伸缩缸机构的电磁换向阀接收控制器的信号,带动移载平台朝向取放区运动,在移载平台的初始位置处设有第二限位传感器,当移载平台到达初始位置处时,第二限位传感器发出回位信号;控制器及执行机构所在总电路与电源之间连接切断。
29.与现有技术相比,本实用新型提供了一种自动清洁装置,包含:移载平台,所述移载平台具有容置空间用以容置待清洁物品;风淋仓,风淋仓中设置风淋气杆,风淋气杆对准所述待清洁物品设置,所述移载平台能够带动待清洁物品进入风淋仓,风淋仓在进行清洁工作时是密封的。据此,与现有技术相比,本实用新型所提供的自动清洁装置达到的技术效果在于,通过自动化清洁设备的开发,极大的减轻了作业员的作业负担,通过对装置的简单操作替代了重复复杂且低效的手工操作,使得作业内容简单高效;通过本实用新型的使用,
显著改善了防静电周转筐的清洁效果, 降低了pcba因异物污染导致失效的风险, 提升了产品的可靠性和质量。
附图说明
30.图1为本实用新型提供的自动清洁装置的一实施例的布置示意主视图。
31.图2为本实用新型提供的自动清洁装置的一实施例的立体结构示意图,将风淋仓中相关零部件暴露展示。
32.图3为本实用新型提供的自动清洁装置的一实施例的主视结构示意图,将风淋仓中相关零部件暴露展示。
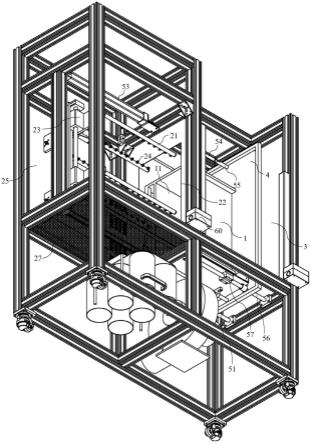
33.图4为本实用新型提供的自动清洁装置的一实施例的另一视角的立体结构示意图,将风淋仓中相关零部件暴露展示。
34.附图标记说明。
[0035]1ꢀꢀꢀꢀ
移载平台
[0036]
11
ꢀꢀꢀ
容置空间
[0037]2ꢀꢀꢀꢀ
风淋仓
[0038]
21
ꢀꢀꢀ
风淋气杆
[0039]
22
ꢀꢀꢀ
进出开口
[0040]
23
ꢀꢀꢀ
移动气缸
[0041]
24
ꢀꢀꢀ
出气头
[0042]
25
ꢀꢀꢀ
主仓体
[0043]
26
ꢀꢀꢀ
集尘箱
[0044]
27
ꢀꢀꢀ
隔板
[0045]
28
ꢀꢀꢀ
集尘抽屉
[0046]
29
ꢀꢀꢀ
抽屉开口
[0047]3ꢀꢀꢀꢀ
取放区
[0048]4ꢀꢀꢀꢀ
密封门
[0049]
50
ꢀꢀꢀ
伸缩缸机构
[0050]
51
ꢀꢀꢀ
滑块滑轨机构
[0051]
52
ꢀꢀꢀ
导向轴孔机构
[0052]
53
ꢀꢀꢀ
缸体
[0053]
54
ꢀꢀꢀ
伸缩杆
[0054]
55
ꢀꢀꢀ
第二端
[0055]
56
ꢀꢀꢀ
滑轨
[0056]
57
ꢀꢀꢀ
滑块
[0057]
58
ꢀꢀꢀ
导向轴
[0058]
59
ꢀꢀꢀ
导向孔
[0059]
60
ꢀꢀꢀ
控制器
[0060]
61
ꢀꢀꢀ
启动开关。
具体实施方式
[0061]
以下结合附图对本实用新型的具体实施方式进行详细说明。
[0062]
参阅图1所示,本实用新型提供的自动清洁装置,包含:移载平台1,移载平台1具有容置空间11用以容置待清洁物品。风淋仓2,风淋仓2中设置风淋气杆21,风淋气杆21对准待清洁物品设置,移载平台1能够带动待清洁物品进入风淋仓2,风淋仓2在进行清洁工作时是密封的。结合参阅图2所示,风淋仓2,呈现框架结构,在框架结构的三个竖直立面和顶面都采用板进行与外界环境的密封。在清洁时,杂质是不会散逸到外部环境中的。待清洁物品的一实施例是印刷电路板组件周转筐。
[0063]
参阅图1所示,本实用新型提供的自动清洁装置,还包含:取放区3。移载平台1初始位于取放区3;在取放区3处,将待清洁物品放置在移载平台1中或将清洁完的物品从移载平台1中取出;移载平台1、取放区3设置有取放开口;移载平台1中设定放置范围,避免与风淋气杆21干涉。图中展示的移载平台1是位于初始位置的。
[0064]
参阅图1、图2所示,本实用新型提供的自动清洁装置,还包含:密封门4。风淋仓2和取放区3交界处、风淋仓2面对初始位置的移载平台1处具有进出开口22。移载平台1与密封门4相对位置固定连接。移载平台1与密封门4一起在风淋仓2和取放区3之间往复运动。当移载平台1位于风淋仓2中开始及正在进行清洁工作时,密封门4与进出开口22靠抵密封设置。
[0065]
参阅图1、图2、图4所示,移载平台1相对于:相对位置不变设置的风淋仓2和取放区3,运动的进出方向d1上,移载平台1与密封门4、或风淋仓2与取放区3相对固接部分、或固定连接有,沿进出方向伸缩的伸缩缸机构50或沿进出方向滑动的滑块滑轨机构51或沿进出方向的导向轴孔机构52。
[0066]
伸缩缸机构50包含缸体53和伸缩杆54,缸体53中容纳压力流体,缸体53与风淋仓2相对固定连接,伸缩杆54的第一端设有活塞在缸体53中被往复推动,伸缩杆54的第二端55相对固定连接密封门4。压力流体可以是压缩气体或者液压油。
[0067]
滑块滑轨机构51包含滑轨56和滑块57,滑块57与滑轨56相互嵌合且滑动连接。滑轨56固定连接、铺设于风淋仓2与取放区3。滑块57固定连接设置于移载平台1处。
[0068]
导向轴孔机构52包含导向轴58和导向孔59,导向轴58架设于取放区3的框架处,导向孔59设置于密封门4上,导向轴58穿设于导向孔59内,密封门4在导向轴58上滑动。
[0069]
伸缩缸机构50包含电磁换向阀,电磁换向阀用以实现伸缩缸机构50沿进出方向伸缩的往复运动。
[0070]
移载平台1在面对风淋仓2及风淋气杆21的面处开口。当移载平台1位于风淋仓2中开始及正在进行清洁工作时,风淋气杆21插入至移载平台1的容置空间11内。
[0071]
参阅图3所示,风淋气杆21由移动气缸23驱动沿着竖直方向d2运动。风淋气杆21上设有出气头24,出气头24处喷出气体。气体为压缩的洁净干燥空气。气体将待清洁物品上的杂质吹离待清洁物品。压缩的洁净干燥空气可以通过压缩机、过滤器、干燥器等装置组合产生。
[0072]
风淋仓2具有主仓体25,主仓体25的下方设有集尘箱26,集尘箱26和主仓体25之间设置具有通气孔的隔板27,移载平台1的底部设有通气孔,在集尘箱26的下部设有集尘抽屉28、对应风淋仓2的外壳体处设有抽屉开口29,集尘抽屉28与抽屉开口29之间抽动、密封连接,在进行清洁工作时,集尘抽屉28与抽屉开口29之间密封连接;将集尘抽屉28从抽屉开口
29中抽出时,用以将收集的杂质倾倒处理。
[0073]
参阅图1、图2、图3、图4所示,自动清洁装置,还包含:控制器60,控制器60包含启动开关61;动作启动开关61用以将控制器及执行机构所在总电路连接到电源。
[0074]
伸缩缸机构50,伸缩缸机构50包含电磁换向阀,控制器控制连接电磁换向阀,移载平台1初始位置位于取放区3,伸缩缸机构50带动移载平台朝向风淋仓2运动。也可以在控制器60上设置第一开关,按下第一开关时,电磁换向阀的其中一个线圈被接通,将该位的压力流体通路导通,进而使得伸缩机构50进行上述运动。
[0075]
密封门4以及与密封门4相对设置的进出开口22,在密封门4和进出开口22处设有第一限位传感器,当密封门4和进出开口22靠抵密封时,第一限位传感器向控制器60发出密封到位信号。第一限位传感器可以设置为限位开关的形式,当限位开关接触后,能够将导致伸缩机构50朝向风淋仓2的运动停止,或者,能够导致后续动作电路的开启。
[0076]
移动气缸23,风淋气杆21由移动气缸23驱动,移动气缸23由移动气缸开关阀、换向阀控制运动,风淋气杆21通过风淋开关阀连接气体源,控制器控制连接移动气缸开关阀、换向阀、风淋开关阀。风淋开关阀将风淋气杆与气体源导通后,风淋气杆能够喷出气体,气体源可以是干燥洁净空气压缩机装置。移动气缸23能够带动喷出气体的风淋气杆21竖直方向d2上下移动,能够在高度方向上对待清洁物品进行清洁。这三个阀的导通电可以通过设置在控制器60上的多个对应的选择开关实现。
[0077]
清洁工作完毕后,伸缩缸机构50的电磁换向阀接收控制器的信号,带动移载平台1朝向取放区3运动,在移载平台1的初始位置处设有第二限位传感器,当移载平台1到达初始位置处时,第二限位传感器发出回位信号;控制器60及执行机构所在总电路与电源之间连接切断。第二限位传感器可以设置为限位开关的形式。
[0078]
以上所述就是本实用新型所提供的自动清洁装置的具体实施方式。
[0079]
据此,本实用新型能达到的技术效果在于:通过自动化清洁设备的开发,极大的减轻了作业员的作业负担,通过对装置的简单操作替代了重复复杂且低效的手工操作,使得作业内容简单高效;通过本实用新型自动清洁装置的使用,显著改善了防静电周转筐的清洁效果, 降低了pcba因异物污染导致失效的风险, 提升了产品的可靠性和质量。
[0080]
上述具体实施例和附图说明仅为例示性说明本实用新型的技术方案及其技术效果,而非用于限制本实用新型。任何熟于此项技术的本领域技术人员均可在不违背本实用新型的技术原理及精神的情况下,在权利要求保护的范围内对上述实施例进行修改或变化,均属于本实用新型的权利保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1