用于池塘水体净化修复的移动固化平板膜净化机器人的制作方法
1.本发明涉及池塘的水体净化,具体涉及到一种用于池塘水体净化修复的移动固化平板膜净化机器人。
背景技术:
2.目前用于河道治理的传统技术主要有物理法、化学法和生物/生态法三大类。物理法主要是通过清淤换水、机械除藻、人工打捞等措施来清除池塘中的污染物,成本费用极高,水体维持时间很短,也不能从根本上解决河道水体污染问题。化学法如混凝沉淀、加入化学药剂杀藻、加入铁盐促进磷的沉淀、加入石灰脱氮等方法,但该池塘污水治理方法成本高且易造成二次污染。目前生物/生态法治理池塘水体,大多是水中种植水生植物,附加其他处理装置,但由于多数处理装置功能单一,使用效果普遍较差,且水生植物在换季时容易死亡腐烂,因此也无法实现水体系统性和持久性的净化处理。
3.此外,池塘尾水处理占地面积大,一般不排水,一旦排水又造成处理空间不够,尤其不能满足一级排放标准的需要;水体中,溶氧高,cod(chemical oxygen demand,化学需氧量cod)高,尤其投饵区难以造成缺氧环境,为了鱼类的生长造成水体脱氮困难,排污不达标。因此,应该提高池塘内部净化效率。
技术实现要素:
4.本发明提供了一种用于池塘水体净化修复的移动固化平板膜净化机器人,所述移动固化平板膜净化机器人包括:
5.主体框架,在所述主体框架上部两侧安装有浮体,在所述浮体作用下使所述主体框架的漂浮于池塘水体上且下部位于水面以下;
6.驱动机构,安装在所述主体框架上,用于驱动所述主体框架在池塘水体移动;
7.曝气净化装置,所述曝气净化装置装载于所述主体框架上且曝气净化装置位于水面以下,所述曝气净化装置自下而上依次由曝气装置、平板膜组件和振动机构组成,其中,
8.所述曝气装置水平安装在所述主体框架的底部,所述曝气装置安装在一平板外壳内,在平板外壳的上表面以及位于所述移动固化平板膜净化机器人航行方向后侧的竖直平面均匀布置有若干曝气孔,平板外壳的上表面的曝气孔为向后倾斜的斜孔;
9.所述平板膜组件包含有若干竖直间隔分布的柔性平板生物膜,所述平板生物膜的下端固定在所述主体框架上,
10.所述振动机构包含有一振动板,所述平板生物膜的上端与所述振动板固定连接,由所述振动板同时带动各所述平板生物膜上端进行往复式水平振动以抖落附着在所述平板生物膜外表面的污垢。
11.进一步的,所述驱动机构为带转向的螺旋桨驱动机构,且所述驱动机构带动所述主体框架前后/后退的方向与所述平板生物膜的厚度方向相一致。
12.进一步的,所述平板外壳的上表面安装有一电动推板,所述电动推板与所述振动
机构相连,所述电动推板上开设有与所述平板外壳上表面曝气孔位置相对应的通孔;
13.所述振动机构启动振动板进行振动时关闭所述曝气装置,并且由所述电动推板在所述平板外壳上表面水平滑动使所述通孔与所述曝气孔错位以闭合所述曝气孔。
14.进一步的,主体框架为矩形不锈钢的框架结构,在主体框架的底部设置有若干前后布置的横杆用于固定各所述平板生物膜的下端。
15.进一步的,在所述主体框架上搭载有水质检测机构、北斗导航定位系统和中央处理单元,驱动机构、曝气净化装置、电动推板、水质检测机构、北斗导航定位系统均与中央处理单元相连;
16.所述水质检测机构用于检测当前水域的水质,若当前水域满足水质要求后,通过所述北斗导航定位系统提供定位并由所述驱动机构带动所述驱动机构移动至下一水域。
17.进一步的,所述曝气装置与安装在所述主体框架上的大功率曝气风机相连。
18.进一步的,在所述主体框架上搭载有锂电池组,为驱动机构、曝气净化装置、电动推板、水质检测机构、北斗导航定位系统、中央处理单元进行供电。
19.进一步的,在所述主体框架上设置有触点式充电口和超声波雷达,在池塘岸边设置有回充装置;
20.锂电池组电量不足时,中央处理单元发送指令至所述驱动机构以使所述主体框架移动至岸边进行充电,通过超声波雷达感测主体框架与回充装置的相对位置并控制所述驱动机构的转向和行进。
21.本发明的优点在于:
22.1)平板生物膜培养有益微生物并对水体进行净化,并且底部的曝气装置产生的气体上浮时不仅能够为微生物提供氧气,还能够带动底部的鱼类排泄物上浮以便于处理;此外,曝气装置可以为漂浮在水面上的移动固化平板膜净化机器人提供向前的推力,起到助力作用。
23.2)通过启动振动机构来带动柔性的平板生物膜进行振动,可以将其表面的淤泥抖落下来,无需手动清理,延长了平板生物膜的使用寿命。
24.3)在主体框架上搭载了很多智能化的终端设备,可以实现自动检测当前水质并智能的移动到未净化水域,从而实现分区和全区净化。
25.4)本发明利用锂电池驱动,绿色无污染,在框架上设置有自动回充装置,电量不足时可以自动移动至岸边的充电装置,无需人工干预,从而实现全自动的长期独立净化。
附图说明
26.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
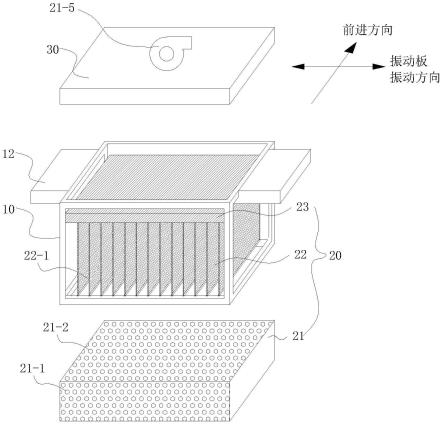
27.图1为本发明提供的一种用于池塘水体净化修复的移动固化平板膜净化机器人的模块分解图;
28.图2为主体框架的示意图;
29.图3为与曝气装置相配合使用的电动推板示意图;
30.图4示出了曝气装置上表面以及后侧面的曝气孔示意图。
具体实施方式
31.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
32.为了彻底理解本发明,将在下列的描述中提出详细的步骤以及详细的结构,以便阐释本发明的技术方案。本发明的较佳实施例详细描述如下,然而除了这些详细描述外,本发明还可以具有其他实施方式。
33.参照图1-3所示,本发明提供了一种用于池塘水体净化修复的移动固化平板膜净化机器人,该移动固化平板膜净化机器人包括:
34.主体框架10,在主体框架10上部两侧安装有浮体12,在浮体12作用下使主体框架10的漂浮于池塘水体上且下部位于水面以下;
35.驱动机构(图中未示出),安装在主体框架10上,用于驱动主体框架10在池塘水体移动;
36.曝气净化装置20,曝气净化装置20装载于主体框架10上且曝气净化装置20位于水面以下,曝气净化装置20自下而上依次由曝气装置21、平板膜组件22和振动机构23组成,其中,
37.曝气装置21水平安装在主体框架10的底部,曝气装置21安装在一平板外壳21-1内,在平板外壳21-1的上表面以及位于移动固化平板膜净化机器人航行方向后侧的竖直平面均匀布置有若干曝气孔21-2,如图1所示,在平板外壳21-1的上表面及前侧面设有曝气孔21-2。其中,平板外壳21-1的上表面的曝气孔21-2为向后倾斜的斜孔,平板膜组件22包含有若干竖直间隔分布的柔性平板生物膜22-1,平板生物膜22-1的下端固定在主体框架10上,
38.振动机构23包含有一振动板,平板生物膜22-1的上端与振动板固定连接,由振动板同时带动各平板生物膜22-1上端进行往复式水平振动以抖落附着在平板生物膜22-1外表面的污垢。其中,振动机构23通过凸轮或者超声振动装置带动振动板进行振动。
39.需要说明的是,当平板生物膜22-1表面附着淤泥过多需要进行清理时,需要提前将本装置移动至指定水域或者打捞上来,随后方能启动振动机构23以清理平板生物膜22-1表面的污垢,避免到抖落下来的污垢对净化后的水体造成二次污染。
40.如图4所示,示出了曝气装置21的曝气孔示意图,上曝气孔21-2a向后倾斜,且后曝气孔21-2b水平布置。曝气装置21曝气所需空气来源于设备顶端的大功率曝气风机21-5,功率一般控制在0.5-1.0kw,可通过调节通往曝气孔21-2的通气量来实现整个装置的固定净化或移动。曝气时,在大功率曝气风机21-5的作用下,通过上曝气孔21-2a和后曝气孔21-2b向外喷射大量气体(如图4箭头方向),可以为漂浮在水面上的移动固化平板膜净化机器人提供向前的推力,起到助力作用。
41.在一可选的实施例中,驱动机构为带转向的螺旋桨驱动机构,且驱动机构带动主体框架10前后/后退的方向与平板生物膜22-1的厚度方向相一致,以减轻装置在水中前进的阻力。
42.在一可选的实施例中,如图3所示,平板外壳21-1的上表面安装有一电动推板21-3,电动推板21-3与振动机构23相连,电动推板21-3上开设有与平板外壳21-1上表面曝气孔21-2位置相对应的通孔21-4。振动机构23启动振动板进行振动时关闭曝气装置21,并且由电动推板21-3在平板外壳21-1上表面水平滑动使通孔21-4与曝气孔21-2错位以闭合曝气孔21-2。振动板在带动各平板生物膜22-1振动时,平板生物膜22-1表面附着的污垢会被抖落下来,这些抖落下来的污垢很容易堵住曝气孔。因此我们在平板外壳21-1上表面安装有电动推板21-3,振动板在工作时滑动电动推板21-3使得通孔21-4与曝气孔21-2相互错位从而以闭合曝气孔21-2,避免曝气孔21-2被堵塞。为了实现电动推板的水平滑动,我们可以在平板外壳21-1的一侧安装有推杆电机以用来驱动电动推板21-3水平滑动。
43.在一可选的实施例中,如图2所示,主体框架10为矩形不锈钢的框架结构,在主体框架10的底部设置有若干前后布置的横杆11用于固定各平板生物膜22-1的下端。
44.在一可选的实施例中,在主体框架10上搭载有水质检测机构、北斗导航定位系统和中央处理单元,驱动机构、曝气净化装置20、电动推板21-3、水质检测机构、北斗导航定位系统均与中央处理单元相连。水质检测机构用于检测当前水域的水质,若当前水域满足水质要求后,通过北斗导航定位系统提供定位并由驱动机构带动驱动机构移动至下一水域。其中,上述的水质检测机构、北斗导航定位系统和中央处理单元主体均搭载主体框架10上表面的设备平台30中,水质检测机构的检测探针设于水中。
45.在一可选的实施例中,在主体框架10上搭载有锂电池组,锂电池组安装在设备平台30中,由锂电池组为驱动机构、曝气净化装置20、电动推板21-3、水质检测机构、北斗导航定位系统、中央处理单元进行供电。
46.在一可选的实施例中,在设备平台30上还设置有触点式充电口和超声波雷达,在池塘岸边设置有回充装置;锂电池组电量不足时,中央处理单元发送指令至驱动机构以使主体框架10移动至岸边进行充电,通过超声波雷达感测主体框架10与回充装置的相对位置并控制驱动机构的转向和行进。
47.基于本发明提供的移动固化平板膜净化机器人,在使用时,在驱动机构的驱使下使主体框架移动至指定水域,平板膜组件的平板生物膜22-1培养有益微生物并对水体进行净化,并且底部的曝气装置21产生的气体上浮时不仅能够为微生物提供氧气,还能够带动底部的鱼类排泄物上浮以便于处理。伴随着使用时间的增加,平板生物膜22-1外表面会附着大量淤泥,这会影响平板生物膜22-1培养微生物的效率,基于此考虑,我们将平板生物膜22-1上端与振动机构23相连,通过启动振动机构23来带动柔性的平板生物膜22-1进行振动,可以将其表面的淤泥抖落下来,无需手动清理,延长了平板生物膜22-1的使用寿命。此外,本发明在主体框架上还搭载了很多智能化的终端设备,可以实现自动检测当前水质并智能的移动到未净化水域,从而实现分区和全区净化。本发明利用锂电池驱动,绿色无污染,在框架上设置有自动回充装置,电量不足时可以自动移动至岸边的充电装置,无需人工干预,从而实现全自动的长期独立净化。
48.以上对本发明的较佳实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,其中未尽详细描述的设备和结构应该理解为用本领域中的普通方式予以实施;任何熟悉本领域的技术人员,在不脱离本发明技术方案范围情况下,都可利用上述揭示的方法和技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等
效实施例,这并不影响本发明的实质内容。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均仍属于本发明技术方案保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1