一种智能化实验室操作系统及其方法与流程
1.本发明属于实验室设备技术领域,具体的说是一种智能化实验室操作系统及其方法。
背景技术:
2.科技的发展离不开专业的人才,而实验室作为人才培养的重要保障也显的愈发重要,而近年来实现实验室智能化操作的技术理念已将实验室世界带入了一个新的时代,因此智能化实验室清洗设备作为智能化实验室操作系统中的一部分,其在保证实验器具的清洁方面也起到了关键的作用。
3.试管作为实验室内经常用到的一种试验辅助器具,大大小小的实验都能看到它的身影,但无论是实验后为防止试管内残留试剂影响后续实验而对其进行的清洗,还是对试管的清洗后其内部的沥水,均是一个不小的工作量,现有的试管清洗多分为人工手动清洗或电动设备清洗,清洗之后普遍都是通过将试管长时间倒置使附着的水滴随着自身重力的因素滴落下来,从而达到沥水的过程,而这种方法通常需要较长的时间,达到的沥水效率较低,同时部分电动清洗设备搭配热风系统进行烘干处理,但是由于试管进口小、深度大的形态,造成热风向试管内壁吹拂效率较低,导致热风在干燥的过程中对试管外壁干燥较快,内部水流干燥较慢,因此导致试管的整体干燥速率较慢。
4.鉴于此,为了克服上述技术问题,本发明设计研发了一种智能化实验室操作系统及其方法,解决了上述技术问题。
技术实现要素:
5.本发明所要解决的技术问题是:本发明提供的一种智能化实验室操作系统及其方法,解决了现有的实验室内试管清洗不便以及沥水效率低的技术问题。
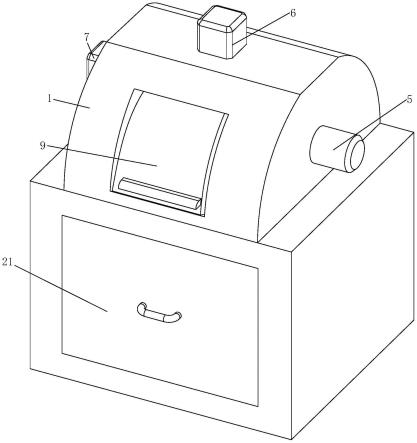
6.为实现以上目的,本发明通过以下技术方案予以实现:本发明提供的一种智能化实验室操作系统,包括壳体、超声波清洗槽和试管,所述壳体下部为矩形结构,上部为八字形结构,且壳体设为空腔结构,所述超声波清洗槽位于壳体内部并与其相连接,还包括:
7.稳固组件,所述稳固组件位于壳体内部且在超声波清洗槽上端,所述稳固组件用于对放入的试管起到夹紧作用;
8.传动组件,所述传动组件与稳固组件相连接,所述传动组件用于驱动稳固组件将其夹紧的试管运输至超声波清洗槽内;
9.沥水组件,所述沥水组件分别与壳体和稳固组件相连接。
10.优选的,稳固组件包括:
11.置管框架,所述置管框架为矩形结构,且内部设有空腔结构,所述置管框架表面开设有均匀排布的管孔;
12.所述管孔贯通置管框架的上下表面;
13.转轴,所述转轴固接在置管框架左右两侧壁;
14.位于所述置管框架右侧的转轴为空心轴,且贯通至置管框架腔体内;
15.支撑杆,所述支撑杆上端与壳体上端壁相连接,下端与转轴相连接;
16.所述支撑杆内部为空腔结构;
17.气囊,所述气囊位于置管框架的腔体内,且气囊的上下表面分别与置管框架的上下内壁固接,所述气囊的通气管位于空心轴内;
18.所述气囊表面开设有用于夹紧试管的环孔,且与管孔的位置相对应;
19.限位板,所述限位板位于置管框架下部,通过连接杆与置管框架固接;
20.气泵,所述气泵固接在壳体右端外壁,所述气泵的充放气管连通至壳体内部;
21.所述充放气管另一端与空心轴内的通气管相连接;
22.所述转轴与支撑杆转动连接。
23.优选的,传动组件包括:
24.传动电机,所述传动电机固接在壳体上端面;
25.主齿轮,所述主齿轮位于壳体内壁,且与传动电机的输出轴固接;
26.副齿轮,所述副齿轮分别位于主齿轮的左右两侧,且分别与其相啮合;
27.螺纹杆,所述螺纹杆位于支撑杆腔体内,且上端与副齿轮固接;
28.螺母,所述螺母固接在支撑杆上端面;
29.所述螺母与螺纹杆螺旋传动连接,实现支撑杆可相对螺纹杆上下滑动;
30.限位滑槽,所述限位滑槽开设在螺母后端对应的壳体内壁;
31.所述螺母通过弹簧伸缩杆与限位滑槽进行滑动连接。
32.优选的,沥水组件包括:
33.沥水电机,所述沥水电机固接在壳体左端外壁;
34.一号齿轮,所述一号齿轮位于壳体内与沥水电机的输出轴固接;
35.二号齿轮,所述二号齿轮与左侧的转轴固接;
36.所述一号齿轮与二号齿轮相啮合;
37.海绵垫,所述海绵垫固接在壳体上端内壁表面。
38.优选的,所述限位板上表面与管孔对应位置开设有限位圆槽,并且在其他位置开设有多个均匀排布的圆孔。
39.优选的,所述壳体上端前部设有开合门,所述壳体上端壁后部与开合门对应位置设有滑腔,所述开合门通过滑杆和滑槽与壳体滑动连接。
40.优选的,所述滑腔下内壁设有凸柱,所述凸柱两侧开设有流水槽贯通壳体侧壁延伸至超声波清洗槽槽内上端。
41.优选的,所述壳体下部结构内滑动连接有推拉柜,所述推拉柜内部与超声波清洗槽相连接。
42.优选的,所述通气管与充放气管连接处通过气动旋转接头衔接。
43.优选的,一种智能化实验室操作系统的操作方法,该方法包括如下步骤:
44.s1:工作人员打开开合门将试管放入置管框架内,启动气泵给气囊充气通过其膨胀将试管夹紧,随后便可关闭开合门;
45.s2:开启超声波清洗槽工作的同时,启动传动电机带动螺纹杆旋转,通过螺母的螺旋传动连接使得支撑杆带着置管框架向下移动,将试管放置在超声波清洗槽内进行清洗,
位于壳体1内部并与其相连接,还包括:
64.稳固组件,所述稳固组件位于壳体1内部且在超声波清洗槽2上端,所述稳固组件用于对放入的试管3起到夹紧作用;
65.传动组件,所述传动组件与稳固组件相连接,所述传动组件用于驱动稳固组件将其夹紧的试管3运输至超声波清洗槽2内;
66.沥水组件,所述沥水组件分别与壳体1和稳固组件相连接。
67.本发明壳体1底部安装现有的超声波清洗槽2,实验人员将试管3放入稳固组件内,驱动稳固组件工作把试管3夹紧将其牢牢固定在稳固组件内,随后驱动传动组件工作将试管3运输到超声波清洗槽2内进行清洗,清洗一定时间后将试管3从超声波清洗槽2内抬起,通过沥水组件带动清洗过的试管3旋转,使附着在试管3内部及其表面的水渍被甩掉,从而达到试管3的沥水效果,这样除了能够实现试管3的自动清洗外,还能加快试管3的沥水速度,快速将附着的水渍清除掉,提高沥水的效率。
68.作为本发明的一种具体实施方式,稳固组件包括:
69.置管框架4,所述置管框架4为矩形结构,且内部设有空腔结构,所述置管框架4表面开设有均匀排布的管孔41;
70.所述管孔41贯通置管框架4的上下表面;
71.转轴42,所述转轴42固接在置管框架4左右两侧壁;
72.位于所述置管框架4右侧的转轴42为空心轴,且贯通至置管框架4腔体内;
73.支撑杆43,所述支撑杆43上端与壳体1上端壁相连接,下端与转轴42相连接;
74.所述支撑杆43内部为空腔结构;
75.气囊44,所述气囊44位于置管框架4的腔体内,且气囊44的上下表面分别与置管框架4的上下内壁固接,所述气囊44的通气管441位于空心轴内;
76.所述气囊44表面开设有用于夹紧试管3的环孔442,且与管孔41的位置相对应;
77.限位板45,所述限位板45位于置管框架4下部,通过连接杆与置管框架4固接;
78.气泵5,所述气泵5固接在壳体1右端外壁,所述气泵5的充放气管51连通至壳体1 内部;
79.所述充放气管51另一端与空心轴内的通气管441相连接;
80.所述转轴42与支撑杆43转动连接。
81.操作人员将试管3通过管孔41放入到置管框架4内,放置于气囊44的环孔442内,限位板45能够限制试管3能够插入的长度,从另一方面讲,置管框架4能够适用于不同口径大小的试管3,开启气泵5工作,气泵5通过充放气管51与通气管441将气体运输至气囊44内,气囊44的环孔442中部臌胀对管孔41内的试管3外管壁形成挤压,将试管3 夹紧从而达到试管3稳定固定的目的,将试管3夹紧一方面能够实现其上下移动的过程中不会松动,另一方面沥水组件带动试管3旋转时确保试管3不会从气囊44内滑落,保证清洗和沥水工作的安全运行,通过传动组件将试管3运输至超声波清洗槽2内部,待运行结束稳定后通过气泵5实行对气囊44的放气,从而气囊44的环孔442松开对试管3的挤压,使得试管3能与清洗液充分接触,这样超声波清洗槽2能够对试管3内管壁以及与环孔442对应的外管壁进行清洗,并且由于试管3自身具有的重力以及管孔41和限位板45 起到的限位作用,能够防止试管3脱离原来的位置,待清洗一段时间后,再启动气泵5对气囊44充气重新将试管3夹紧,使用传动组件
将试管3稳定运输上来,准备后续的沥水工作。
82.作为本发明的一种具体实施方式,传动组件包括:
83.传动电机6,所述传动电机6固接在壳体1上端面;
84.主齿轮61,所述主齿轮61位于壳体1内壁,且与传动电机6的输出轴固接;
85.副齿轮62,所述副齿轮62分别位于主齿轮61的左右两侧,且分别与其相啮合;
86.螺纹杆63,所述螺纹杆63位于支撑杆43腔体内,且上端与副齿轮62固接;
87.螺母631,所述螺母631固接在支撑杆43上端面;
88.所述螺母631与螺纹杆63螺旋传动连接,实现支撑杆43可相对螺纹杆63上下滑动;
89.限位滑槽6311,所述限位滑槽6311开设在螺母631后端对应的壳体1内壁;
90.所述螺母631通过弹簧伸缩杆与限位滑槽6311进行滑动连接,这样螺纹杆63和螺母 631螺旋传动连接时,螺母631不会发生转动,使得其相对于限位滑槽6311上下移动,从而实现试管3的上升下降运动。
91.待实验人员操作稳固组件将试管3固定好后,驱动传动电机6工作通过输出轴正转带动主齿轮61旋转,主齿轮61带动与其啮合的副齿轮62一同转动,副齿轮62带动螺纹杆 63在螺母631内转动,通过螺旋传动连接使得螺母631相对限位滑槽6311向下移动,从而使得与螺母631固接的支撑杆43一同向下移动,因此,支撑杆43通过下端与转轴42 相连接推动置管框架4向下移动,使得试管3浸泡在超声波清洗槽2内的清洗液中,通过现有的超声波清洗技术对试管3进行清洗,超声波清洗相较于人工或自动采用毛刷清洗能够降低对试管3的磨损程度,毛刷存在将试管3表面的刻度线清洗掉的风险,待试管3清洗一定时间后,驱动传动电机6的输出轴反转即可将置管框架4和试管3向上升起,完成对试管3的清洗流程。
92.作为本发明的一种具体实施方式,沥水组件包括:
93.沥水电机7,所述沥水电机7固接在壳体1左端外壁;
94.一号齿轮71,所述一号齿轮71位于壳体1内与沥水电机7的输出轴固接;
95.二号齿轮72,所述二号齿轮72与左侧的转轴42固接;
96.所述一号齿轮71与二号齿轮72相啮合;
97.海绵垫11,所述海绵垫11固接在壳体1上端内壁表面。
98.试管3通过传动组件升上来后,一号齿轮71和二号齿轮72本身是啮合的,因此二号齿轮72随着传动组件上下移动并未发生旋转,二号齿轮72归位后仍是与一号齿轮71啮合的,继续驱动沥水电机7工作通过输出轴带动一号齿轮71旋转,一号齿轮71带动与其啮合的二号齿轮72一同旋转,转轴42与支撑杆43两者之间是转动连接,因此二号齿轮 72带动转轴42旋转同时会带动置管框架4、限位板45及放置的试管3一起旋转,试管3 在旋转的途中表面附着的清洗液因为离心力的作用会被甩出去,滴洒在壳体1上壁的海绵垫11上,海绵垫11能够及时吸收滴落在表面的水滴,防止水滴再次滴落在试管3上,壳体1上部从侧面看是八字状结构,因此海绵垫11上的水渍因为重力的作用会沿着弧线向低处的海绵垫11蔓延,这样能够避免试管3正上方的海绵垫11长时间吸水导致饱和致使无法再次吸水使得水滴刚附着在海绵垫11上又滴落下来的问题出现,并且海绵垫11低处的水渍随着时间的延长会重新掉落到超声波清洗槽2内,实现清洗液的回收重复利用,工作一定时间后,停止沥水电机7工作即可将沥完水的试管3取出。
99.作为本发明的一种具体实施方式,所述限位板45上表面与管孔41对应位置开设有
限位圆槽451,并且在其他位置开设有多个均匀排布的圆孔452。
100.限位圆槽451能便于试管3的放置,配合管孔41能更好的限制试管3的位置,确保试管3尽可能是竖直的,防止放好的试管3下端与限位板45滑动出现倾斜,避免气囊44 充气膨胀时试管3因放置倾斜过度导致试管3受挤压断裂的情况发生,并且圆孔452能够减少限位板45与清洗液的相对运动干涉,降低限位板45下降刚接触到清洗液所受到的阻力。
101.作为本发明的一种具体实施方式,所述壳体1上端前部设有开合门9,所述壳体1上端壁后部与开合门9对应位置设有滑腔12,所述开合门9通过滑杆和滑槽与壳体1滑动连接,所述滑腔12下内壁设有凸柱13,所述凸柱13两侧开设有流水槽14贯通壳体1侧壁延伸至超声波清洗槽2槽内上端。
102.工作前将开合门9推开,将试管3放置好后再将开合门9关上开始运行工作,避免沥水时水渍洒出来,待沥完水后将开合门9向后端的滑腔12内推动打开,开合门9打开一方面能够实现试管3的拿取与放置,另一方面推动时开合门9下端壁的海绵垫11会被凸柱13挤压,使得海绵垫11吸收的水分被挤出从两侧的流水槽14重新流到超声波清洗槽2 内,一来避免海绵垫11的吸水饱和,二来实现对清洗液的回收,减少对资源的浪费。
103.作为本发明的一种具体实施方式,所述壳体1下部结构内滑动连接有推拉柜21,所述推拉柜21内部与超声波清洗槽2相连接。
104.通过推拉柜21能够实现对超声波清洗槽2内部的清洗液进行更换,一方面是清洗液使用久了会产生污垢导致试管3清洗效果不佳,更换后能确保清洗效率,另一方面由于实验室的试剂种类繁多,试管3内的试剂通过一些普通的清洗液可能难以清洗,这时可以将推拉柜21抽出对超声波清洗槽2内的清洗液进行更换,选用清洗效果更佳的清洗液进行清洗。
105.作为本发明的一种具体实施方式,所述通气管441与充放气管51连接处通过气动旋转接头511衔接。
106.沥水组件工作带动试管3转动的同时会连同气囊44的通气管441和充放气管51一同转动,因升降过程的需求充放气管51的长度会有点长,旋转会连带充放气管51一同旋转导致其缠绕起来甚至会出现过度缠绕导致断裂的情况出现,采用现有的气动旋转接头511 将通气管441和充放气管51拼接起来,气动旋转接头511是可360
°
旋转的同时还能传输气体的滑环产品,并且密封性有所保证,这样通气管441旋转只会带动气动旋转接头511 一端进行旋转,与充放气管51连接的一端不会转动,因此能够很好地解决充放气管51会被缠起来的问题。
107.作为本发明的一种具体实施方式,一种智能化实验室操作系统的操作方法,该方法包括如下步骤:
108.s1:工作人员打开开合门9将试管3放入置管框架4内,启动气泵5给气囊44充气通过其膨胀将试管3夹紧,随后便可关闭开合门9;
109.s2:开启超声波清洗槽2工作的同时,启动传动电机6带动螺纹杆63旋转,通过螺母631的螺旋传动连接使得支撑杆43带着置管框架4向下移动,将试管3放置在超声波清洗槽2内进行清洗,清洗完后驱动传动电机6反转将试管3升上来;
110.s3:置管框架4升上来归位的位置刚好致使一号齿轮71与二号齿轮72啮合,启动沥水电机7工作使得置管框架4开始旋转,从而将试管3内的清洗液甩出来,旋转一定时间后,关闭沥水电机7;
111.s4:最后打开开合门9,启动气泵5完成气囊44的放气,便可将试管3从置管框架4 内取出。
112.工作原理:操作人员将试管3通过管孔41放入到置管框架4内,放置于气囊44的环孔442内,限位板45能够限制试管3能够插入的长度,从另一方面讲,置管框架4能够适用于不同口径大小的试管3,开启气泵5工作,气泵5通过充放气管51与通气管441将气体运输至气囊44内,气囊44的环孔442中部臌胀对管孔41内的试管3外管壁形成挤压,将试管3夹紧从而达到试管3稳定固定的目的,将试管3夹紧一方面能够实现其上下移动的过程中不会松动,另一方面沥水组件带动试管3旋转时确保试管3不会从气囊44 内滑落,保证清洗和沥水工作的安全运行,通过传动组件将试管3运输至超声波清洗槽2 内部,待运行结束稳定后通过气泵5实行对气囊44的放气,从而气囊44的环孔442松开对试管3的挤压,使得试管3能与清洗液充分接触,这样超声波清洗槽2能够对试管3内管壁以及与环孔442对应的外管壁进行清洗,并且由于试管3自身具有的重力以及管孔41 和限位板45起到的限位作用,能够防止试管3脱离原来的位置,待清洗一段时间后,再启动气泵5对气囊44充气重新将试管3夹紧,使用传动组件将试管3稳定运输上来,准备后续的沥水工作。待实验人员操作稳固组件将试管3固定好后,驱动传动电机6工作通过输出轴正转带动主齿轮61旋转,主齿轮61带动与其啮合的副齿轮62一同转动,副齿轮62带动螺纹杆63在螺母631内转动,通过螺旋传动连接使得螺母631相对限位滑槽6311 向下移动,从而使得与螺母631固接的支撑杆43一同向下移动,因此,支撑杆43通过下端与转轴42相连接推动置管框架4向下移动,使得试管3浸泡在超声波清洗槽2内的清洗液中,通过现有的超声波清洗技术对试管3进行清洗,超声波清洗相较于人工或自动采用毛刷清洗能够降低对试管3的磨损程度,毛刷存在将试管3表面的刻度线清洗掉的风险,待试管3清洗一定时间后,驱动传动电机6的输出轴反转即可将置管框架4和试管3向上升起,完成对试管3的清洗流程。试管3通过传动组件升上来后,一号齿轮71和二号齿轮72本身是啮合的,因此二号齿轮72随着传动组件上下移动并未发生旋转,二号齿轮72 归为后仍是与一号齿轮71啮合的,继续驱动沥水电机7工作通过输出轴带动一号齿轮71 旋转,一号齿轮71带动与其啮合的二号齿轮72一同旋转,转轴42与支撑杆43两者之间是转动连接,因此二号齿轮72带动转轴42旋转同时会带动置管框架4、限位板45及放置的试管3一起旋转,试管3在旋转的途中去表面附着的清洗液因为离心力的作用会被甩出去,滴洒在壳体1上壁的海绵垫11上,海绵垫11能够及时吸收滴落在表面的水滴,防止水滴再次滴落在试管3上,壳体1上部从侧面看是八字状结构,因此海绵垫11上的水渍因为重力的作用会沿着弧线向低处的海绵垫11蔓延,这样能够避免试管3正上方的海绵垫11长时间吸水导致饱和致使无法再次吸水使得水滴刚附着在海绵垫11上又滴落下来的问题出现,并且海绵垫11低处的水渍随着时间的延长会重新掉落到超声波清洗槽2内,实现清洗液的回收重复利用,工作一定时间后,停止沥水电机7工作即可将沥完水的试管 3取出。
113.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1