一种自适应油烟管道清洁机器人的制作方法
1.本发明涉及油烟管道清洁技术领域,具体来说,涉及一种自适应油烟管道清洁机器人。
背景技术:
2.油烟管道的清理一直是生活中较大的问题,传统的油烟管道清洁装置在使用时不方便进行清理,因为难以进入管道中,且不方便运动,管道深处更加难以清理,不方便转向,且传统的油烟管道清洁在使用时不方便运动喷涂,清洁不够细致,操作麻烦,且针对上述问题提出一种自适应油烟管道清洁机器人。
3.针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现要素:
4.针对相关技术中的问题,本发明提出一种自适应油烟管道清洁机器人,以克服现有相关技术所存在的上述技术问题。
5.本发明的技术方案是这样实现的:一种自适应油烟管道清洁机器人,包括壳体,所述壳体内侧开设有控制槽,该控制槽内侧安装有控制机构,所述壳体上设有用于所述壳体移动的运动机构;所述运动机构包括驱动组件、四组调向组件和八组贴合组件,所述壳体靠近所述控制机构的一端安装有所述驱动组件,所述壳体外侧中央位置处均匀安装有四组所述调向组件,所述壳体远离所述驱动组件的一端外侧均匀安装有八组所述贴合组件。
6.进一步的,所述控制机构主要是由处理器、蓄电池、无线信号收发器和视频信号收发器组成的。
7.进一步的,所述驱动组件主要是由转架、两个转杆、两个电机a、两个滚轮、两个胶圈和两个弹簧组成的,所述壳体靠近所述控制机构的一端固定连接有所述转架,所述转架内侧通过转轴转动连接两个所述转杆,每个所述转杆远离所述壳体的一端固定连接有所述电机a,所述电机a输出端固定连接有所述滚轮,所述滚轮外侧固定连接有所述胶圈,所述转杆靠近所述壳体的一端固定连接有所述弹簧,所述弹簧与所述壳体固定连接。
8.进一步的,所述壳体靠近所述控制机构的一端开设有连接孔,所述弹簧外侧与该连接孔固定连接,所述转架设置在该连接孔内侧。
9.进一步的,每组所述调向组件主要是由电动伸缩杆、安装壳、电机b和转向轮组成的,所述壳体内侧固定连接有所述电动伸缩杆,所述电动伸缩杆输出端固定连接有所述安装壳,所述安装壳内侧固定连接有所述电机b,所述电机b输出端固定连接有所述转向轮。
10.进一步的,每组所述贴合组件主要是有轮架和贴合轮组成的,所述壳体外侧固定连接有所述轮架,所述轮架内侧通过转轴转动连接有所述贴合轮。
11.进一步的,所述壳体上还有用于清理作业的清理机构,所述清理机构包括喷嘴、吸管、照明灯和摄像头,所述喷嘴远离所述运动机构的一端固定连接有所述喷嘴,所述喷嘴输
入端固定连接有所述吸管,所述壳体远离所述控制机构的一端内侧开设有储存槽,所述吸管设置在该储存槽内侧,所述喷嘴贯穿所述壳体的表面,所述壳体远离所述运动机构的一端固定连接有所述照明灯,所述壳体远离所述运动机构的一端固定连接有所述摄像头。
12.进一步的,所述照明灯和所述摄像头分别设置在所述喷嘴的两侧。
13.本发明提供了一种自适应油烟管道清洁机器人,本发明的有益效果如下:1、本发明中,通过设置的运动机构,方便装置在管道中运动,提高装置使用的便捷性,可以适应不同内径的管道,拓展装置的使用范围,提高装置使用的效果,操作简单。
14.2、本发明中,通过设置的清理机构,方便进行自动清洁作业,节省人工成本,操作简单,提高清洁效率,清洁更加细致。
附图说明
15.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
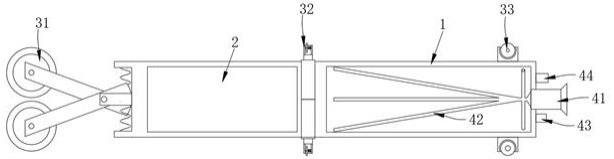
16.图1是根据本发明实施例的一种自适应油烟管道清洁机器人的整体结构示意图;图2是根据本发明实施例的一种自适应油烟管道清洁机器人的整体结构剖视图;图3是根据本发明实施例的一种自适应油烟管道清洁机器人的驱动组件的安装结构示意图;图4是根据本发明实施例的一种自适应油烟管道清洁机器人的调向组件的安装结构示意图;图5是根据本发明实施例的一种自适应油烟管道清洁机器人的贴合组件的安装结构示意图;图6是根据本发明实施例的一种自适应油烟管道清洁机器人的吸管的安装结构示意图;图中:1、壳体;2、控制机构;3、运动机构;31、驱动组件;311、转架;312、转杆;313、电机a;314、滚轮;315、胶圈;316、弹簧;32、调向组件;321、电动伸缩杆;322、安装壳;323、电机b;324、转向轮;33、贴合组件;331、轮架;332、贴合轮;4、清理机构;41、喷嘴;42、吸管;43、照明灯;44、摄像头。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.下面,结合附图以及具体实施方式,对本发明做出进一步的描述:实施例一:请参阅图1、图2、图3、图4和图5,根据本发明实施例的一种自适应油烟管道清洁机器人,包括壳体1,壳体1内侧开设有控制槽,该控制槽内侧安装有控制机构2,壳体1上设有用于壳体1移动的运动机构3;运动机构3包括驱动组件31、四组调向组件32和八组贴合组件33,壳体1靠近控制机构2的一端安装有驱动组件31,壳体1外侧中央位置处均匀安装有四组调向组件32,壳体1远离驱动组件31的一端外侧均匀安装有八组贴合组件33。
19.控制机构2主要是由处理器、蓄电池、无线信号收发器和视频信号收发器组成的。
20.驱动组件31主要是由转架311、两个转杆312、两个电机a313、两个滚轮314、两个胶圈315和两个弹簧316组成的,壳体1靠近控制机构2的一端固定连接有转架311,转架311内侧通过转轴转动连接两个转杆312,每个转杆312远离壳体1的一端固定连接有电机a313,电机a313输出端固定连接有滚轮314,滚轮314外侧固定连接有胶圈315,转杆312靠近壳体1的一端固定连接有弹簧316,弹簧316与壳体1固定连接。
21.壳体1靠近控制机构2的一端开设有连接孔,弹簧316外侧与该连接孔固定连接,转架311设置在该连接孔内侧。
22.每组调向组件32主要是由电动伸缩杆321、安装壳322、电机b323和转向轮324组成的,壳体1内侧固定连接有电动伸缩杆321,电动伸缩杆321输出端固定连接有安装壳322,安装壳322内侧固定连接有电机b323,电机b323输出端固定连接有转向轮324。
23.每组贴合组件33主要是有轮架331和贴合轮332组成的,壳体1外侧固定连接有轮架331,轮架331内侧通过转轴转动连接有贴合轮332。
24.将该装置放置在管道中后,弹簧316推动转杆312,使得两转杆312相互对向在转架311上转动,胶圈315管道内侧壁贴合,然后控制机构2控制电机a313运行带动滚轮314转动,滚轮314带动胶圈315转动,进而带动壳体1在管道中运动,使得壳体1可以适应不同规格的管道,若管道倾斜,总会有最少一组贴合组件33中的贴合轮332与管道内侧壁接触,贴合轮332在轮架331中转动,进而避免壳体1与管道接触,然后当需要进行转向的的时候,电动伸缩杆321运行伸出,安装壳322上的电机b323运行带动转向轮324转动,转向轮324与管道内侧壁紧密贴合,进而转向轮324带动壳体1转动,方便装置在管道中运动。
25.实施例二:请参阅图1、图2和图6,根据本发明实施例的一种自适应油烟管道清洁机器人,包括壳体1,壳体1内侧开设有控制槽,该控制槽内侧安装有控制机构2,壳体1上设有用于壳体1移动的运动机构3;运动机构3包括驱动组件31、四组调向组件32和八组贴合组件33,壳体1靠近控制机构2的一端安装有驱动组件31,壳体1外侧中央位置处均匀安装有四组调向组件32,壳体1
远离驱动组件31的一端外侧均匀安装有八组贴合组件33。
26.壳体1上还有用于清理作业的清理机构4,清理机构4包括喷嘴41、吸管42、照明灯43和摄像头44,喷嘴41远离运动机构3的一端固定连接有喷嘴41,喷嘴41输入端固定连接有吸管42,壳体1远离控制机构2的一端内侧开设有储存槽,吸管42设置在该储存槽内侧,喷嘴41贯穿壳体1的表面,壳体1远离运动机构3的一端固定连接有照明灯43,壳体1远离运动机构3的一端固定连接有摄像头44。
27.照明灯43和摄像头44分别设置在喷嘴41的两侧。
28.在清洁作业的时候,喷嘴41运行通过吸管42吸取壳体1的储存槽中的清洗剂,通过喷嘴41喷出,对管道内壁的物资进行溶解,照明灯43可以进行照明作业,摄像头44可以对管道内壁进行观察,方便进行自动清洁作业,节省人工成本,操作简单,提高清洁效率。
29.需要说明的是:因为控制机构2主要是由处理器、蓄电池、无线信号收发器和视频信号收发器组成的,该装置通过蓄电池进行供电,然后通过外置遥控器配合无线信号收发器进行控制,摄像头44通过视频信号收发器进行视频的传输,且在壳体1对应储存槽的位置处开设有进料孔,通过封盖将盖进料孔封堵,然后控制机构2的充电端应该贯穿壳体1的表面,且有外壳的保护。
30.为了方便理解本发明的上述技术方案,以下就本发明在实际过程中的工作原理或者操作方式进行详细说明。
31.在实际应用时,该装置在使用时,将该装置放置在管道中后,弹簧316推动转杆312,使得两转杆312相互对向在转架311上转动,胶圈315管道内侧壁贴合,然后控制机构2控制电机a313运行带动滚轮314转动,滚轮314带动胶圈315转动,进而带动壳体1在管道中运动,使得壳体1可以适应不同规格的管道,若管道倾斜,总会有最少一组贴合组件33中的贴合轮332与管道内侧壁接触,贴合轮332在轮架331中转动,进而避免壳体1与管道接触,然后当需要进行转向的的时候,电动伸缩杆321运行伸出,安装壳322上的电机b323运行带动转向轮324转动,转向轮324与管道内侧壁紧密贴合,进而转向轮324带动壳体1转动,方便装置在管道中运动,提高装置使用的便捷性,可以适应不同内径的管道,拓展装置的使用范围,提高装置使用的效果,操作简单,在清洁作业的时候,喷嘴41运行通过吸管42吸取壳体1的储存槽中的清洗剂,通过喷嘴41喷出,对管道内壁的物资进行溶解,照明灯43可以进行照明作业,摄像头44可以对管道内壁进行观察,方便进行自动清洁作业,节省人工成本,操作简单,提高清洁效率,清洁更加细致。
32.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1