智能高效聚合物溶液除氧系统的制作方法
[0001]
本实用新型涉及除氧技术领域,具体涉及智能高效聚合物溶液除氧系统。
背景技术:
[0002]
在高温油藏条件下评价聚合物性能时,常以聚合物溶液的热稳定性能作为关键指标。聚合物溶液的热稳定性能指的是在油藏温度和矿化度条件下,经过长时间后聚合物溶液粘度的稳定性能。以往的试验中经常采用配置符合条件的聚合物溶液经除氧后密封,然后再放入具有油藏温度的烘箱中,不定期测量聚合物溶液的粘度,计算溶液的粘度保留率,利用粘度保留率来评价聚合物的热稳定性能。粘度保留率高则说明聚合物溶液的热稳定性能好;反之则说明聚合物溶液的热稳定性差。
[0003]
在氧存在的条件下,聚合物容易产生氧化降解,使聚合物溶液的粘度大幅降低,从而影响聚合物热稳定性能的评价。因此,聚合物溶液中的溶解氧去除率能否达到一定的标准,是准确评价聚合物热稳定性能的关键。
[0004]
现有技术中,采用的除氧方式是对静置的溶液进行反复的抽真空和充氮气的过程,这种方法简单、易操作,但是除氧率低,仅对溶液表面进行了除氧,溶液中部和底部的氧气含量依旧很大且溶液中的最终含氧量无法控制。
技术实现要素:
[0005]
有鉴于此,本实用新型为了在至少一定程度上克服相关技术中存在的问题,提供一种智能高效聚合物溶液除氧系统。
[0006]
为解决上述技术问题,本实用新型采用如下技术方案:
[0007]
本申请提供一种智能高效聚合物溶液除氧系统,包括:真空泵组件、真空系统电磁阀、干燥组件、聚合物溶液除氧组件、氮气系统电磁阀、氮气发生装置、系统控制电路、液晶触摸屏和震动组件;
[0008]
其中,所述真空泵组件进气端通过铜管与真空系统电磁阀一端相连,真空系统电磁阀另一端通过硅胶管与干燥组件输出端相连,干燥组件输入端通过硅胶管与聚合物溶液除氧组件抽气端相连,聚合物溶液除氧组件充气端通过硅胶管与氮气系统电磁阀一端相连,氮气系统电磁阀另一端通过铜管与氮气发生装置输出端相连,系统控制电路通过电源线分别与真空泵组件、真空系统电磁阀、震动组件、氮气系统电磁阀相连接,系统控制电路通过rs-485与液晶触摸屏相连接;
[0009]
所述震动组件设置在所述聚合物溶液除氧组件的下部,以在所述智能高效聚合物溶液除氧系统工作时震动所述聚合物溶液除氧组件。
[0010]
可选的,所述震动组件包括底座、设置在底座上方的载物架和用于驱动载物架震动的振动电机,所述载物架上设置有用于放置所述聚合物溶液除氧组件的放置槽,所述振动电机固定安装在所述载物架的底端,所述底座上设置有用于支撑载物架的弹性支撑件。
[0011]
可选的,还包括调速器,所述调速器与所述振动电机连接,用于调节所述振动电机
的震动频率。
[0012]
可选的,还包括有多个用于限制所述载物架前后左右摆动的限位结构。
[0013]
可选的,还包括有罩在所述载物架和限位结构外的消音保护罩,所述消音保护罩的顶壁设置多个供所述聚合物溶液除氧组件穿过的通孔,多个所述通孔与多个所述放置槽一一对应设置。
[0014]
可选的,所述聚合物溶液除氧组件包括透明玻璃鱼骨管和耐压瓶;
[0015]
所述耐压瓶包括通气口、通液口,所述通液口将待除氧的聚合物溶液导入所述耐压瓶内,所述震动组件设置在所述耐压瓶的下部;
[0016]
所述透明玻璃鱼骨管包括至少一个透明玻璃鱼骨支管,各所述透明玻璃鱼骨支管的一端与透明玻璃鱼骨主管的主体连通,另一端与所述耐压瓶的通气口连接;
[0017]
所述透明玻璃鱼骨主管的一端连接所述干燥组件,另一端连接所述氮气系统电磁阀。
[0018]
可选的,所述耐压瓶还包括控制口,所述控制口内设置有调节器件;
[0019]
所述调节器件在插入所述控制口内大于或等于第一预设长度时,将所述通气口封闭;在插入所述控制口内小于或等于第二预设长度时,将所述通气口打开。
[0020]
可选的,所述调节器件为螺杆。
[0021]
可选的,所述干燥组件包括至少一个干燥瓶,各所述干燥瓶依次连接。
[0022]
可选的,还包括收集瓶;
[0023]
所述的真空泵组件包括真空泵机组和油雾过滤器;真空泵机组出气端与油雾过滤器相连;
[0024]
所述收集瓶与所述油雾过滤器的出气端连接,用于收集液化的气体。
[0025]
本实用新型采用以上技术方案,可以实现如下技术效果:本申请的智能高效聚合物溶液除氧系统包括:真空泵组件、真空系统电磁阀、干燥组件、聚合物溶液除氧组件、氮气系统电磁阀、氮气发生装置、系统控制电路、液晶触摸屏和震动组件;其中,所述真空泵组件进气端通过铜管与真空系统电磁阀一端相连,真空系统电磁阀另一端通过硅胶管与干燥组件输出端相连,干燥组件输入端通过硅胶管与聚合物溶液除氧组件抽气端相连,聚合物溶液除氧组件充气端通过硅胶管与氮气系统电磁阀一端相连,氮气系统电磁阀另一端通过铜管与氮气发生装置输出端相连,系统控制电路通过电源线分别与真空泵组件、真空系统电磁阀、震动组件、氮气系统电磁阀相连接,系统控制电路通过rs-485 与液晶触摸屏相连接;所述震动组件设置在所述聚合物溶液除氧组件的下部,以在所述智能高效聚合物溶液除氧系统工作时震动所述聚合物溶液除氧组件。通过在聚合物溶液除氧组件的下部设置震动组件,可以在聚合物溶液除氧过程中对溶液起到震动作用,以使溶液内的氧气在受到震动时发散出来,不仅可以去除溶液表层的氧气,溶液中部和底部的氧气也会随着震动组件的震动而散发在溶液的表层,进而将氧气去除。
附图说明
[0026]
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提
下,还可以根据这些附图获得其他的附图。
[0027]
图1是本实用新型一实施例提供的智能高效聚合物溶液除氧系统的结构示意图;
[0028]
图2是本实用新型一实施例提供的智能高效聚合物溶液除氧系统中震动组件的结构示意图;
[0029]
图3是本实用新型一实施例提供的智能高效聚合物溶液除氧系统中调速器的电路结构示意图;
[0030]
图4是本实用新型另一实施例提供的智能高效聚合物溶液除氧系统的结构示意图;
[0031]
图5是本实用新型一实施例提供的智能高效聚合物溶液除氧系统中耐压瓶的结构示意图;
[0032]
图6是本实用新型一实施例提供的智能高效聚合物溶液除氧系统的电路结构示意图;
[0033]
图7是本实用新型一实施例提供的智能高效聚合物溶液除氧系统的流程示意图。
[0034]
附图标记:
[0035]
101-真空泵组件、102-震动组件、103-真空系统电磁阀、104-干燥组件、 105-聚合物溶液除氧组件、106-氮气系统电磁阀、107-氮气发生装置、108-系统控制电路、109-液晶触摸屏、1011-真空泵机组、1012-油雾过滤器、1013
-ꢀ
收集瓶、1051-透明玻璃鱼骨管、1052-耐压瓶、10521-通液口、10522-通气口、 10523-控制口、1071-氮气发生器、1072-精密压力表、1073-三通、1-载物架、 2-限位杆、3-限位板、4-底座、5-弹性支撑件、6-螺纹孔、7-振动电机、8-滑槽。
具体实施方式
[0036]
为使本实用新型的目的、技术方案和优点更加清楚,下面将对本实用新型的技术方案进行详细的描述。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本实用新型所保护的范围。
[0037]
实施例
[0038]
图1是本实用新型一实施例提供的智能高效聚合物溶液除氧系统的结构示意图。如图1所示,本实施例提供一种智能高效聚合物溶液除氧系统,包括:真空泵组件101、真空系统电磁阀103、干燥组件104、聚合物溶液除氧组件105、氮气系统电磁阀106、氮气发生装置107、系统控制电路108、液晶触摸屏109 和震动组件102;
[0039]
其中,所述真空泵组件进气端通过铜管与真空系统电磁阀一端相连,真空系统电磁阀另一端通过硅胶管与干燥组件输出端相连,干燥组件输入端通过硅胶管与聚合物溶液除氧组件抽气端相连,聚合物溶液除氧组件充气端通过硅胶管与氮气系统电磁阀一端相连,氮气系统电磁阀另一端通过铜管与氮气发生装置输出端相连,系统控制电路通过电源线分别与真空泵组件、真空系统电磁阀、震动组件、氮气系统电磁阀相连接,系统控制电路通过rs-485与液晶触摸屏相连接;所述震动组件设置在所述聚合物溶液除氧组件的下部,以在所述智能高效聚合物溶液除氧系统工作时震动所述聚合物溶液除氧组件。
[0040]
本实施例中,通过在聚合物溶液除氧组件的下部设置震动组件,可以在聚合物溶
液除氧过程中对溶液起到震动作用,以使溶液内的氧气在受到震动时发散出来,不仅可以去除溶液表层的氧气,溶液中部和底部的氧气也会随着震动组件的震动而散发在溶液的表层,进而将氧气去除。
[0041]
图2是本实用新型一实施例提供的智能高效聚合物溶液除氧系统中震动组件的结构示意图。如图2所示,所述震动组件包括底座4、设置在底座上方的载物架1和用于驱动载物架震动的振动电机7,所述载物架上设置有用于放置所述聚合物溶液除氧组件的放置槽,所述振动电机固定安装在所述载物架的底端,所述底座上设置有用于支撑载物架的弹性支撑件5。
[0042]
一些实施例中,利用振动电机7在工作时的震动,外加弹性支撑件5对容器中的聚合物溶液或凝胶体系造成震动,在震动的过程中利用弹性支撑件5的弹性使容器上下震动,造成容器中的溶液上下翻滚。配合在密闭条件下对容器中的溶液进行抽真空的过程中会造成溶液翻滚的现象就加剧了对溶液中部和底部溶液的有效除氧,可以促成容器中聚合物溶液或凝胶体系达到无氧或微氧条件。
[0043]
本实施例中,弹性支撑件5设置有多个,多个弹性支撑件5的弹性系数相同,并均匀分布在载物架1的底端一方面能够控制载物架1的高度,另一方面能够确保载物架1的平衡性。这里,底座4上可以设置有两个弹性支撑件5,也可以设置有四个弹性支撑件5。
[0044]
弹性支撑件5为支撑弹簧,支撑弹簧的一端固定连接在底座4的上端面上,另一端固定连接在载物架1的底端。在震动的过程中利用支撑弹簧的弹性使容器上下震动。
[0045]
进一步的,震动组件还包括调速器,所述调速器与所述振动电机连接,用于调节所述振动电机的震动频率。通过调节调速器,可以调整震动的频率,加剧除氧效果的实现。
[0046]
图3是本实用新型一实施例提供的智能高效聚合物溶液除氧系统中调速器的电路结构示意图。如图3所示,调速器上设置有指示灯rl,以指示调速器的工作状态。通过将调解开关调解到0、1、2、3四个位置,使得电路在依次连接导线、r1、r2、r3的过程中,通过改变负载的大小改变调速器的震动频率。
[0047]
进一步的,震动组件的底座4上还设置有多个限位结构,以用于限制载物架1前后左右摆动,从而使载物架1只能上下震动。
[0048]
如此设置,解决了现有除氧方式只能对表面的溶液进行除氧而无法有效去除溶液中的氧气含量的问题。
[0049]
本实施例的优选方案中,限位结构包括有限位板3和限位杆2,限位板3 固定连接在底座4的上端面上,限位杆2固定连接在载物架1的侧壁上,限位板3上设置有滑槽8,限位杆2位于滑槽8内,并能够在滑槽8内上下移动。这样,限位杆2只能沿滑槽8上下移动,滑槽8的侧壁限制限位杆2晃动,从而能够限制载物架1晃动。并且多个限位结构同时作用,限制了载物架1前后左右晃动,使载物架1只能上下震动。
[0050]
在一种实施例中,载物架1呈长方体结构,载物架1的四个侧壁上至少有一个与其相配合的限位结构,以限制载物架1前后左右摆动,具体地可以是,该装置设置有六个限位结构,即载物架1的面积小的侧壁上均设置有一个限位杆2,载物架1的面积大的侧壁上均设置有两个限位杆2,两个限位杆2相距设置,底座4上设置有六个与限位杆2相对应的限位板3,六个限位杆2与六个限位板3相配合,限制了载物架1左右前后摆动。
[0051]
在另一种实施例中,载物架1可以为圆柱体结构,该装置可以设置有三个限位结
构,三个限位结构均匀分布在载物架1的外周,以用于限制载物架1前后左右摆动。
[0052]
本实施例的另一优选方案中,该装置还包括有消音保护罩,消音保护罩罩在载物架1和限位结构外,以用于降低振动电机7产生的噪音。
[0053]
其中,消音保护罩的顶壁设置有多个通孔,多个通孔与多个放置槽一一对应设置,以供装有聚合物溶液或凝胶体系的容器穿过放置到放置槽内。
[0054]
优选地,消音保护罩内设置有用于隔音的隔音层,隔音层的材质可以为吸音棉,吸音棉是一种人造无机纤维。采用石英砂、石灰石、白云石等天然矿石为主要原料,配合一些纯碱、硼砂等化工原料熔成玻璃。在融化状态下,借助外力吹制式甩成絮状细纤维,纤维和纤维之间为立体交叉,互相缠绕在一起,呈现出许多细小的间隙。吸音棉吸音率高,隔音性能好;隔热性好;耐火性能好,材料b1,b2阻燃级别,离火自熄、不会蔓延,且无烟、无毒气产生;产品对人体无害;100%环保产品,100%可回收利用;坚固、好用无味,防水、防潮、透气性能良好,极易加工,可根据不同需要制成各种形状使用寿命长;不会腐烂,能抵御各种微生物、真菌、酸、盐和碳氢化合物的腐蚀;在生产过程中不添加任何助剂、粘胶剂。
[0055]
其中,消音保护罩的底端与底座4可拆卸地连接,以便于检修载物架1或振动电机7。这里,消音保护罩与底座4可以通过固定螺丝进行组装固定,消音保护罩的底端和底座4上均设置与固定螺丝螺纹配合的螺纹孔6。
[0056]
以下以一种具体的实施方式进行说明,装有聚合物溶液或凝胶体系的容器放置在载物架1的放置槽内,在载物架1的底端设置有用于驱动载物架1震动的振动电机,并且载物架1由四个高系数的弹簧支撑控制其高度,在载物架1 的四个方向分别有限位结构防止载物架1在工作的时候前后左右摆动,通过振动电机7的震动触发弹簧的上下波动,带动载物架1的上下震动使容器中的溶液配合真空状态快速翻滚,去除溶液内部的氧气含量;在载物架1外安装有消音保护罩,消音保护罩内设置有吸音棉以用于吸收振动电机7产生的噪音,从而降低该装置的噪音。
[0057]
图4是本实用新型另一实施例提供的智能高效聚合物溶液除氧系统的结构示意图。如图4所示,所述聚合物溶液除氧组件105包括透明玻璃鱼骨管1051 和耐压瓶1052;
[0058]
其中,参照图5,所述耐压瓶包括通气口10522、通液口10521,所述通液口将待除氧的聚合物溶液导入所述耐压瓶内,所述震动组件设置在所述耐压瓶的下部;
[0059]
所述耐压瓶还包括控制口10523,所述控制口内设置有调节器件;
[0060]
所述调节器件在插入所述控制口内大于或等于第一预设长度时,将所述通气口封闭;在插入所述控制口内小于或等于第二预设长度时,将所述通气口打开。可选的,所述调节器件可以但不限于为螺杆。
[0061]
所述透明玻璃鱼骨管包括至少一个透明玻璃鱼骨支管,各所述透明玻璃鱼骨支管的一端与透明玻璃鱼骨主管的主体连通,另一端与所述耐压瓶的通气口连接;所述透明玻璃鱼骨主管的一端连接所述干燥组件,另一端连接所述氮气系统电磁阀。
[0062]
一些实施例中,透明玻璃鱼骨管1051主要用来连接由真空泵组件等组成的抽真空系统和由氮气发生装置组成的氮气发生系统,并且为耐压瓶1052分配工位。透明玻璃鱼骨管1051上配备有多个透明玻璃鱼骨管支管,每个透明玻璃鱼骨管支管上装有手动阀,其中,透明玻璃鱼骨管支管为多个时,两侧的2个透明玻璃鱼骨管支管分别连接干燥瓶1041和氮气系统电磁阀106,中间透明玻璃鱼骨管支管分别通过硅胶管连接耐压瓶1052,不工作的透
明玻璃鱼骨管支管通过其上的手动阀进行关闭。其中,透明玻璃鱼骨管支管的数量可以根据实际情况进行设置,例如,可以为8个。
[0063]
基于上述相关实施例,可以将耐压瓶放置在载物架的放置槽中,以通过载物架将耐压瓶固定。
[0064]
一些实施例中,参照图4,所述真空泵组件101包括真空泵机组1011和油雾过滤器1012。该真空泵机组1011出气端与油雾过滤器1012相连,该真空泵机组1011的进气端即为真空泵组件101的进气端。该真空泵机组1011通过中间环节对聚合物溶液除氧组件105进行抽气,出气端连接油雾过滤器1012可有效防止真空泵机组工作过程中的油雾飞溅,降低污染,在油雾过滤器1012的出气端连接收集瓶1013可以有效地收集液化的气体,防止液体污染。
[0065]
所述真空系统电磁阀103用来接通或断开干燥及缓冲组件104与聚合物溶液除氧组件105之间的气体通道。其型号为dc24v电磁阀。
[0066]
参见图1所示,所述干燥组件104包括至少一个干燥瓶1041。在干燥瓶为多个时,各干燥瓶依次连接,干燥瓶的输出端连接下一干燥瓶的输入端,首个干燥瓶的输入端连接、聚合物溶液除氧组件,最后一个干燥的输出端连接真空系统电磁阀。
[0067]
其中,干燥瓶1042可以但不限于为玻璃容器,干燥瓶1042中装有可反复利用的干燥剂-无水氯化钙等,主要目的是过滤从聚合物溶液除氧组件105中抽出的水汽,避免真空泵机组1011油乳化。
[0068]
一些实施例中,所述氮气系统电磁阀106用来接通或断开氮气发生装置107 与聚合物溶液除氧组件105之间的气体通道。
[0069]
所述氮气发生装置107包括氮气发生器1071、精密压力表1072和三通 1073。氮气发生器1071的输出端经硬胶管与三通1073的一端相连,精密压力表1072通过铜管与三通1073另一端相连,三通1073剩余的一端作为氮气发生装置107的输出端。氮气发生器1071用来产出高纯度的氮气,精密压力表1072 通过三通1073经氮气系统电磁阀106连接在氮气发生器1071和透明玻璃鱼骨管1051之间,可实时显示氮气压力,以免充氮气时压力过大损坏透明玻璃鱼骨管1051。该氮气发生器1071是上海毕克气体仪器贸易有限公司生产的250cc 氮气发生器;该精密压力表1072是北京布莱迪仪器仪表有限公司生产的0.4 级yb150型精密压力表;该三通1073是市购的仪表类φ6三通接头。
[0070]
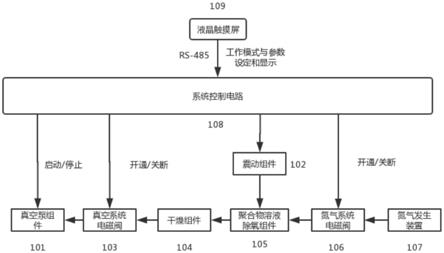
图6是本实用新型一实施例提供的智能高效聚合物溶液除氧系统的电路结构示意图。如图6所示,所述系统控制电路108通过电源线分别与真空泵组件 101、震动组件102、真空系统电磁阀103、氮气系统电磁阀106相连接,通过 rs-485与液晶触摸屏109相连接。系统控制电路108按照液晶触摸屏109设定的工作模式及相关参数控制真空泵组件101、真空系统电磁阀103和氮气系统电磁阀106的开通和关断。
[0071]
一些实施例中,所述液晶触摸屏109通过rs-485总线与系统控制电路108 相连。液晶触摸屏109用来设定及显示工作模式和相关参数等。其型号规格是 weinview-mt6071ie液晶触摸屏。
[0072]
在一个具体的实施例中,本申请的聚合物溶解氧除氧系统工作原理为:系统上电后,通过液晶触摸屏109设定系统的工作模式和相关参数,设定信息通过rs485传输至系统控制电路108,系统控制电路108根据设定信息控制真空泵组件101的启/停以及真空系统电
磁阀103和氮气系统电磁阀106的开通/关断。工作过程中,系统控制电路108控制氮气系统电磁阀106关断、真空系统电磁阀103开通、真空泵组件101及震动组件102启动,系统开始对聚合物溶液除氧组件105抽真空,以去除聚合物溶液及聚合物溶液除氧组件105中的氧气,聚合物溶液除氧组件105中的氧气经干燥组件104干燥缓冲后经由真空系统电磁阀103输入气体经链接铜管被抽至真空泵组件101内的真空泵机组1011 并经过油雾过滤器1012后排出,气体经过冷却液化后流至收集瓶1013。若氧含量未达指标或设定的工作任务未完成,系统控制电路108停止真空泵组件101 并关断真空系统电磁阀103,继而开通氮气系统电磁阀106,系统开始对聚合物溶液除氧组件105充氮气,氮气发生装置107产生的氮气经氮气系统电磁阀106 传输至聚合物溶液除氧组件105。充氮气完成后,系统继续对聚合物溶液除氧组件105进行抽真空,如此循环,直至氧含量达到相应指标或设定的工作任务完成,系统停止工作,并有声音报警,提示除氧结束。最后,在耐压瓶处于充氮气的正压环境下通过耐压瓶的旋钮螺杆对耐压瓶进行封口。
[0073]
参见图7所示,本申请的聚合物溶解氧除氧系统工作流程为:系统上电后,初始化完成,进行工作模式设置,工作模式有微量氧控制模式和循环次数控制模式两种。若选用微量氧控制模式,则进行氧含量以及抽真空和充氮气的时间设置。设置完成后,系统启动,开始工作,首先进行抽真空,抽真空时间达到设定时间后,若当前氧含量值小于或等于氧含量设定值,则系统停止工作,并有声音报警,提示除氧结束;若当前氧含量值大于氧含量设定值,则系统进行充氮气,充氮气时间达到设定时间后,系统继续进行抽真空,如此循环,直至当前氧含量值小于或等于氧含量设定值,系统停止工作,并有声音报警,提示除氧结束。若选用循环次数控制模式,则进行循环次数以及每次抽真空和充氮气时间设置。设置完成后系统启动,开始工作,首先进行抽真空,抽真空时间达到设定时间后,若当前剩余循环次数为0,则系统停止工作,并有声音报警,提示除氧结束;若当前剩余循环次数不为0,则系统进行充氮气,充氮气时间达到设定时间后,系统继续进行抽真空,如此循环,直至当前剩余循环次数为 0,系统停止工作,并有声音报警,提示除氧结束。
[0074]
可以理解的是,上述各实施例中相同或相似部分可以相互参考,在一些实施例中未详细说明的内容可以参见其他实施例中相同或相似的内容。
[0075]
需要说明的是,在本实用新型的描述中,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,在本实用新型的描述中,除非另有说明,“多个”的含义是指至少两个。
[0076]
流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更多个用于实现特定逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本实用新型的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本实用新型的实施例所属技术领域的技术人员所理解。
[0077]
应当理解,本实用新型的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,多个步骤或方法可以用存储在存储器中且由合适的指令执行装置执行的软件或固件来实现。例如,如果用硬件来实现,和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(pga),
现场可编程门阵列 (fpga)等。
[0078]
本技术领域的普通技术人员可以理解实现上述实施例方法携带的全部或部分步骤是可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,该程序在执行时,包括方法实施例的步骤之一或其组合。
[0079]
此外,在本实用新型各个实施例中的各功能单元可以集成在一个处理模块中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个模块中。上述集成的模块既可以采用硬件的形式实现,也可以采用软件功能模块的形式实现。所述集成的模块如果以软件功能模块的形式实现并作为独立的产品销售或使用时,也可以存储在一个计算机可读取存储介质中。
[0080]
上述提到的存储介质可以是只读存储器,磁盘或光盘等。
[0081]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0082]
尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1