鞋用一体化喷漆装置的制作方法
1.本实用新型涉及一种喷漆装置,尤其涉及一种鞋用一体化喷漆装置。
背景技术:
2.工业机器人应用领域已经拓展到各行各业,极大地解放了人力物力,促进了生产作业效率的提高。对于鞋业领域而言,当前国内外鞋业生产主要依靠传统人力,市场需求大,替换率高,且作业步骤多、耗时长、迫切需要转型升级。而鞋面喷漆工艺是制鞋工艺中较为的关键工序,一种鞋类生产需要使用包括光亮剂、黑小牛、柔顺剂等不同漆料,工作环境恶劣,人工成本高,具有较强的刺激气味,容易对作业人员身体造成危害。因此,实现喷漆工艺的机器人自动化对提高整个制鞋装备的自动化水平有着极其重要的积极意义。
3.现有的喷漆设备多为针对某种特定鞋型设计,通用性差。且喷漆柔性程度低,使用一段时间后稳定性差,喷枪和喷漆回路容易固化堵塞。
技术实现要素:
4.实用新型目的:本实用新型旨在提供一种适配各种鞋型的鞋用一体化喷漆装置。
5.技术方案:本实用新型所述的一种鞋用一体化喷漆装置,包括用于夹取鞋子的夹取装置和对鞋面进行喷漆的喷漆装置。
6.其中,鞋用喷漆装置还包括线体输送装置和位于线体输送装置另一侧的用于将鞋子从线体输送装置上提升到一定高度的提升装置,提升装置和线体输送装置使用中型负载工业机器人,喷漆装置使用小型负载高精度工业机器人,夹取装置使用中型负载工业机器人,喷漆装置内设置清洗装置。喷漆装置为半封闭式的水帘喷漆房,水帘喷漆房内包括用于喷漆的喷枪及设置在水帘喷漆房顶部的排风装置,清洗装置包括用于清洗喷枪喷嘴外部的清洗盒、为清洗装置供水的水流管路。喷枪设置在小型机器人末端的第六轴,小型机器人悬挂于水帘喷漆房内部顶壁上,喷枪内设置有利用电磁阀控制回路的清洗溶剂和喷漆液。清洗盒内设置有清洗溶液和浸泡清洗溶液的海绵。
7.本实用新型中,夹取装置内的夹爪设置于中型负载工业机器人的第六轴末端。夹取装置包括独立的三轴垂直升降气缸和二指气动平行气缸,二指气动平行气缸的安装板设置为实现两二指气动平行气缸的单一伸缩和夹取的移动轨道和定位止挡装置。
8.本实用新型中,提升装置设置有用于提升鞋子的纵向伸缩气缸和将鞋子向前输送的横向伸缩气缸,纵向伸缩气缸的下端设置有限位止档板。水帘喷漆房设置用于暂存清洗废水的废水处理槽。水帘喷漆房顶部设置有提醒喷漆装置异常的警示装置。排风装置与工厂废气处理系统直连。
9.有益效果:与现有技术相比,本实用新型具有如下优点:(1)在喷漆工件的夹取、移动轨迹和喷漆漆料方面适配性强,并根据不同鞋型、尺码及大小进行柔性作业适配; (2)最大化的解决喷漆自动化产线运行过程中导致的机器人喷漆示教动作困难、工件的流转备料以及喷漆设备液体固化堵塞的清洗问题;(3)一体化喷漆单元便于工厂喷漆工位的复制,布
局调整方便,优化了制鞋工艺流程,提高作业精度和作业质量;(4)中型负载工业机器人和小型负载高精度工业机器人的结合使用,使得操作柔性程度高,更为精确。
附图说明
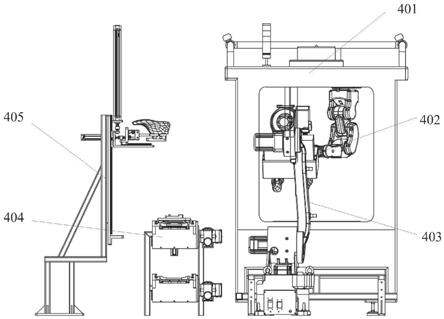
10.图1为本实用新型鞋用一体化喷漆装置主视图;
11.图2为本实用新型鞋用一体化喷漆装置俯视图;
12.图3为本实用新型鞋用水帘喷漆房装置主视图;
13.图4为本实用新型鞋用一体化喷漆装置线边机构示意图;
14.图5为本实用新型鞋用一体化喷漆装置夹持装置示意图。
具体实施方式
15.下面结合附图1
‑
5对本实用新型的技术方案作进一步说明。
16.如图所示的一种鞋用一体化喷漆装置,包括用于夹取鞋子的夹取装置402和对鞋面进行喷漆的喷漆装置401,鞋用喷漆装置401还包括线体输送装置404和位于线体输送装置404另一侧的用于将鞋子从线体输送装置404上提升到一定高度的提升装置405,提升装置405和线体输送装置404使用中型负载工业机器人,喷漆装置401使用小型负载高精度工业机器人,夹取装置402使用中型负载工业机器人,喷漆装置401内设置清洗装置。
17.线体输送装置404由头部驱动部分、尾部从动部分、铝型材、光电传感器、滚子、顶升定位机构等组成。头部驱动部分包括减速电机、齿轮、传动轴及张紧块,尾部从动部分包括从动轴及从动齿轮。其中,顶升定位机构包括顶升气缸、直线轴承、阻挡器及连接法兰等通过螺钉固定于线体内侧,气缸带有磁环和磁性感应器,直线轴承下方设置连接块,用于气缸行程止挡;同时安装光电传感器判断物料的有无。
18.喷漆装置401为半封闭式的水帘喷漆房,水帘喷漆房内包括用于喷漆的喷枪422及设置在水帘喷漆房顶部的排风装置413,清洗装置包括用于清洗喷枪422喷嘴外部的清洗盒424、为清洗装置供水的水流管路421。
19.所述喷枪422设置在小型机器人末端的第六轴,小型机器人悬挂于水帘喷漆房内部顶壁上,喷枪422内设置有利用电磁阀控制回路的清洗溶剂和喷漆液。控制系统设定工艺清洁时间a以及停机自清洁时间b,当设定时间达到后系统启动清洁功能,清洗溶剂通过管路对喷漆组件内部进行冲洗,防止漆液固化堵塞喷枪422。
20.清洗盒424内设置有清洗溶液和浸泡清洗溶液的海绵。
21.一个作业周期完成时,小型工业机器人带动喷枪422移动至清洗盒中,小型盒内部镶嵌有清洗海绵并添加足量清洗液,驱动喷枪嘴进行擦拭接触,防止喷漆液体在喷枪嘴外侧的凝固堵塞。当工艺清洗要求及时间达到设定值时,清洗回路动作进行管路和喷枪 422内部的清洗,等待下一个作业时间或喷涂周期的使用。
22.夹取装置402内的夹爪设置于中型负载工业机器人的第六轴末端,为非垂直输出法兰设计。当中型工业机器人夹持工件放入喷漆房内部时,小型悬挂机器人带动喷漆组件进行喷漆作业,柔性化程度高。
23.夹取装置402包括独立的三轴垂直升降气缸445和二指气动平行气缸443,二指气动平行气缸443的安装板设置为实现两二指气动平行气缸443的单一伸缩和夹取的移动轨
道和定位止挡装置。二指气动平行气缸443的夹爪442设置定位销,鞋楦采用合金材质并开槽,槽内部预留销孔,便于夹爪442的稳定抓取。
24.三轴垂直升降气缸445为两个,分别位于两只鞋子的上部,两个三轴垂直升降气缸 445气路分离,在上料夹取阶段,同时夹持两只左右鞋料。在移动放置于喷漆房内部作业时,可以根据工艺要求和喷涂效果,通过单气缸独立伸缩针对其中一只鞋工件的喷漆作业,最大化避免左右鞋料间隙较小而导致喷漆范围不足及干涉问题。
25.当喷漆液体性质较为稀薄时,喷漆液从喷枪422喷射行成的喷射范围行程较长,所选三轴垂直升降气缸445为短行程,夹持装置体积小,中型工业机器人403夹取时不会对机器人本体和线体输送装置404造成干涉。则中型工业机器人403及提升装置执行如下动作:第一次来料时,由中型工业机器人403带动夹取装置402,直接从线体输送装置404上将鞋料进行移动和喷漆作业。在作业过程当中,提升装置405将第二次来料工件进行夹取提升,作为等待工位。上次鞋料喷漆作业完成,中型工业机器人403将已完成喷涂工件放置到线体输送装置404上,光电开关检测到物料后,阻挡器下移释放,再由中型工业机器人403移动到提升装置405到达高度对鞋料进行夹取。动作依次顺延,从第二次以后机器人直接从提升装置405进行夹取。
26.当喷漆液体性质较为粘稠时,喷漆液从喷枪422喷射行成的喷射范围行程较短,三轴垂直升降气缸445为长行程,夹持装置402机构体积大,中型工业机器人403夹取时容易与本体和线体输送装置404造成干涉。来料时,由提升装置405先将来料工件进行夹取提升,再由中型工业机器人403移动到提升装置405对鞋料进行抬升的高度对鞋料进行夹取,从而避免干涉。
27.提升装置405设置有用于提升鞋子的纵向伸缩气缸431和将鞋子向前输送的横向伸缩气缸432,纵向伸缩气缸43和横向伸缩气缸432均带有磁环和磁性感应器,纵向伸缩气缸431的下端设置有限位止档板434。
28.水帘喷漆房设置用于暂存清洗废水的废水处理槽411。
29.水帘喷漆房顶部设置有提醒喷漆装置401异常的警示装置425。
30.排风装置413与工厂废气处理系统直连,针对喷漆介质产生的刺激或有害气体进行排放。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1