一种废钢仓储用远程雾炮机自动控制方法与流程
1.本发明涉及废钢仓储降尘技术领域,更具体地说,涉及一种废钢仓储用远程雾炮机自动控制方法。
背景技术:
2.废钢,指的是钢铁厂生产过程中不成为产品的钢铁废料(如切边、切头等)以及使用后报废的设备、构件中的钢铁材料,成分为钢的叫废钢;成分为生铁的叫废铁,统称废钢,目前有专门的仓储房对废钢进行仓储。
3.雾炮机是废钢仓储、加工过程中环境治理的重要组成设备,主要利用高压将水雾化后在强风机的作用下喷出,以雾化后的水与空气中的尘埃结合吸附沉降后以满足净化空气的目的,现有的雾炮机通常嫁接在汽车上进行降尘作业,也有一部分采用固定模式进行降尘,在这些降尘模式中,都存在一个严重的问题,由于雾炮机的喷射范围有限,在汽车上嫁接或者固定式安装都有一个喷射极限值,只能进行低空降尘作业,对高空降尘一直未得到充分的研究与解决。
4.经检索,中国专利申请号:2020103195806,发明创造名称为:多自由度雾炮喷雾装置,该申请案公开了多自由度雾炮喷雾装置,包括底座和雾炮本体,雾炮本体将输入到雾炮本体内的水以水雾状喷出,雾炮本体包括机架和可摆动的架设在机架上的雾炮筒,机架底部连接转轴且转轴外套设蜗轮,底座上设置有电机,电机的输出轴通过联轴器连接与所述蜗轮啮合传动的蜗杆以使雾炮本体可在底座上水平转动。该申请案通过设置底座和雾炮本体,雾炮本体包括机架和雾炮筒,雾炮本体可在底座上水平转动且雾炮筒可往复摆动的设置在机架上,有效增大了喷雾的范围,进而增加了降尘的效果;但该申请案仍有进一步优化的空间。
技术实现要素:
5.1.发明要解决的技术问题
6.本发明的目的在于克服现有技术中雾炮机不便进行高空降尘的问题,拟提供一种废钢仓储用远程雾炮机自动控制方法,可以实现在废钢仓储中有效进行高空降尘。
7.2.技术方案
8.为达到上述目的,本发明提供的技术方案为:
9.本发明的一种废钢仓储用远程雾炮机自动控制方法,采用废钢仓储用远程雾炮机系统,按照以下步骤进行:
10.s1、使用前,操作人员通过控制按键向中央处理器输入粉尘浓度正常值作为仓储房内粉尘的预警值,粉尘浓度传感器检测仓储房内不同位置的粉尘浓度值,作为检测值;
11.s2、使用时,粉尘浓度传感器将检测的粉尘浓度值传输给数据对比器,数据对比器通过反馈模块将浓度值传输给中央处理器,使用前通过控制按键设置的正常值会通过中央处理器传输给数据对比器,当检测到仓储房内某个位置的粉尘浓度值不达标时,中央处理
器控制启动炮雾机及其位置调整组件,使炮雾机在合适的位置进行降尘。
12.更进一步地,步骤s2中具体包括以下过程:
13.s21、中央处理器启动双轴电机,双轴电机的两个输出轴带动两个第一螺纹杆进行转动,第一螺纹杆带动第一螺纹套进行水平移动,从而带动两个炮雾机进行水平移动;待炮雾机调节到预定水平位置后,中央处理器启动第一电动伸缩杆,使炮雾机达到预定的高度;
14.s22、待高度调节完毕后,中央处理器启动驱动电机,驱动电机的输出轴带动第二螺纹杆进行转动,第二螺纹杆带动第二螺纹套进行前后移动,使得炮雾机达到前后预定位置,中央处理器启动第二电动伸缩杆,第二电动伸缩杆对炮雾机的水平角度进行调节;
15.s23、待两个炮雾机到达预定位置后,中央处理器启动两个炮雾机,进行降尘,完毕后中央处理器自动将炮雾机恢复到初始位置。
16.更进一步地,中央处理器的型号为arm9。
17.更进一步地,粉尘浓度传感器为激光散射式粉尘浓度传感器。
18.更进一步地,所述的废钢仓储用远程雾炮机系统,包括仓储房和驱动箱;驱动箱设置于仓储房顶部,驱动箱内设置有水平位移调节组件,该水平位移调节组件底部与第一电动伸缩杆相连,第一电动伸缩杆的底部设有移动箱;移动箱内设置有前后位移调节组件,该前后位移调节组件的端部与炮雾机相连,炮雾机一端与前后位移调节组件的端部铰接,另一端则与第二电动伸缩杆相连,第二电动伸缩杆用于调节炮雾机的角度。
19.更进一步地,水平位移调节组件包括设置于驱动箱内的双轴电机,双轴电机的两个输出轴端均安装有第一螺纹杆,第一螺纹杆上配合设有第一螺纹套,第一螺纹套底部安装有第一电动伸缩杆。
20.更进一步地,双轴电机的两端的两个第一螺纹杆表面螺纹纹路相反。
21.更进一步地,前后位移调节组件包括设于移动箱内的驱动电机,驱动电机的输出轴端连接有第二螺纹杆,第二螺纹杆上配合设有第二螺纹套,移动箱底壁上沿前后方向还设有滑槽,第二螺纹套底部对应设有与该滑槽相配合的第一滑块;第二螺纹套顶部设有支撑杆,支撑杆上设置有炮雾机,以及用于调整炮雾机角度的第二电动伸缩杆。
22.更进一步地,支撑杆伸出移动箱顶壁之外并与横板相连,移动箱的侧壁上还设有前后延伸的滑槽板,横板的一侧对应设有与该滑槽板相配合的第二滑块;横板的顶部一端设有转动架与炮雾机铰接,另一端设有第二电动伸缩杆与炮雾机连接。
23.更进一步地,仓储房内还安装有粉尘浓度传感器、中央处理器、蓄电池和控制按键,粉尘浓度传感器的输出端与数据对比器的输入端相连接,数据对比器的输出端与反馈模块的输入端连接,反馈模块的输出端与中央处理器的输入端连接,蓄电池的输出端分别与粉尘浓度传感器、中央处理器和控制按键的输入端电性连接,控制按键的输出端与中央处理器的输入端连接。
24.3.有益效果
25.采用本发明提供的技术方案,与现有技术相比,具有如下有益效果:
26.(1)本发明的废钢仓储用远程雾炮机自动控制方法,通过利用实时粉尘检测信息,自动实现对雾炮机的高度、水平位置、前后位置以及喷射角度进行调节,将水进行加压后雾化并高压喷射出去,使得射出的水雾在一定范围内形成一张幕网结构,从而将漂浮的风尘颗粒包裹并通过自身重力作用做自由落体运动,从而达到高空降尘的作用,很大程度上提
升了降尘质量以及效果,减轻了操作人员的工作负担。
27.(2)本发明的废钢仓储用远程雾炮机自动控制方法,由粉尘浓度传感器和炮雾机构成的喷淋系统装置,能够根据废钢场喷淋降尘的实际需要按设定的程序,用炮雾机进行喷淋降尘、循环喷淋除尘、定时喷淋防尘等多种形式的自动运行,还可根据特殊情况随时调整运行程序增减喷淋时间,应用灵活方便。
附图说明
28.图1为本发明的雾炮机系统结构示意图;
29.图2为本发明中驱动箱和仓储房的剖视结构示意图;
30.图3为图2中a处的局部放大结构示意图;
31.图4为本发明中移动箱的剖视结构示意图;
32.图5为本发明中处理箱的剖视结构示意图;
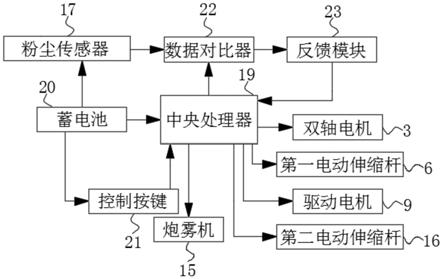
33.图6为本发明的雾炮机系统的结构原理框图。
34.示意图中的标号说明:
35.1、仓储房;2、驱动箱;3、双轴电机;4、第一螺纹杆;5、第一螺纹套;6、第一电动伸缩杆;7、联动块;8、移动箱;9、驱动电机;10、第二螺纹杆;11、第二螺纹套;12、支撑杆;13、横板;14、转动架;15、炮雾机;16、第二电动伸缩杆;17、粉尘浓度传感器;18、处理箱;19、中央处理器;20、蓄电池;21、控制按键;22、数据对比器;23、反馈模块;24、第一滑块;25、滑槽;26、滑槽板;27、第二滑块。
具体实施方式
36.为进一步了解本发明的内容,结合附图对本发明作详细描述。
37.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
38.下面结合实施例对本发明作进一步的描述。
39.实施例1
40.如图1
‑
图6所示,本实施例的一种废钢仓储用远程雾炮机自动控制方法,采用废钢仓储用远程雾炮机系统,具体地,该雾炮机系统包括仓储房1和驱动箱2;驱动箱2设置于仓储房1顶部,驱动箱2内设置有水平位移调节组件,该水平位移调节组件底部与第一电动伸缩杆6相连,第一电动伸缩杆6的底部设有移动箱8;移动箱8内设置有前后位移调节组件,该前后位移调节组件的端部与炮雾机15相连,炮雾机15一端与前后位移调节组件的端部铰接,另一端则与第二电动伸缩杆16相连,第二电动伸缩杆16用于调节炮雾机15的角度。
41.具体地,本实施例中水平位移调节组件包括设置于驱动箱2内的双轴电机3,双轴电机3的两个输出轴转速相同,转向相同,双轴电机3的两个输出轴端均安装有第一螺纹杆4,两个第一螺纹杆4表面螺纹纹路相反,且每个第一螺纹杆4的端部分别通过轴承与驱动箱2的内壁转动连接,第一螺纹杆4上配合设有第一螺纹套5,第一螺纹套5底部安装有第一电
动伸缩杆6,第一电动伸缩杆6的底端即贯穿驱动箱2和仓储房1并延伸至仓储房1内部,驱动箱2的底部和仓储房1的顶部均设有与第一电动伸缩杆6相配合的开口。第一电动伸缩杆6的底部通过联动块7安装有移动箱8,通过双轴电机3的转动即可驱动两侧第一螺纹套5的水平位置移动,即最终驱动移动箱8的水平位置移动。
42.本实施例中前后位移调节组件包括设于移动箱8内的驱动电机9,驱动电机9和双轴电机3均为伺服电机。驱动电机9的输出轴端通过联轴器连接有第二螺纹杆10,第二螺纹杆10的一端通过轴承与移动箱8的内壁转动连接,第二螺纹杆10的表面螺纹上配合设有第二螺纹套11,移动箱8底壁上沿前后方向还设有滑槽25,第二螺纹套11底部对应设有与该滑槽25相配合的第一滑块24;第二螺纹套11顶部设有支撑杆12,支撑杆12上设置有炮雾机15,以及用于调整炮雾机15角度的第二电动伸缩杆16。
43.具体地,支撑杆12伸出移动箱8顶壁之外并与横板13相连,移动箱8的侧壁上还设有前后延伸的滑槽板26,横板13的一侧对应设有与该滑槽板26相配合的第二滑块27;横板13的顶部一端设有转动架14与炮雾机15铰接,另一端设有第二电动伸缩杆16与炮雾机15连接。本实施例中横板13设置为l形结构,其水平段一端与支撑杆12相连,并在上方设置转动架14,其水平段另一端则设有第二电动伸缩杆16,且该端向下延伸为竖直段,该竖直段的内侧即设有与滑槽板26相配合的第二滑块27。
44.本实施例中,仓储房1内还安装有粉尘浓度传感器17、中央处理器19、蓄电池20和控制按键21,粉尘浓度传感器17的输出端与数据对比器22的输入端相连接,数据对比器22的输出端与反馈模块23的输入端连接,反馈模块23的输出端与中央处理器19的输入端连接,蓄电池20的输出端分别与粉尘浓度传感器17、中央处理器19和控制按键21的输入端电性连接,控制按键21的输出端与中央处理器19的输入端连接;中央处理器19的输出端分别与数据对比器22、双轴电机3、第一电动伸缩杆6、第二电动伸缩杆16、驱动电机9和炮雾机15的输入端连接。中央处理器19的型号为arm9,粉尘浓度传感器17为激光散射式粉尘浓度传感器。
45.利用本实施例的系统进行自动控制的方法,具体按照以下步骤进行:
46.s1、使用前,操作人员通过控制按键21向中央处理器19输入粉尘浓度正常值作为仓储房1内粉尘的预警值,粉尘浓度传感器17可以通过激光散射检测仓储房1内不同位置的粉尘浓度值,作为检测值;
47.s2、使用时,粉尘浓度传感器17将检测的仓储房1内不同位置的粉尘浓度值传输给数据对比器22,数据对比器22通过反馈模块23将浓度值传输给中央处理器19,使用前通过控制按键21设置的正常值会通过中央处理器19传输给数据对比器22,当检测到仓储房1内某个位置的粉尘浓度值不达标时,中央处理器19控制启动炮雾机15及其位置调整组件,使炮雾机15在合适的位置进行降尘,即依次启动双轴电机3、第一电动伸缩杆6、第二电动伸缩杆16、驱动电机9和炮雾机15,具体包括以下过程:
48.s21、中央处理器19启动双轴电机3,双轴电机3的两个输出轴带动两个第一螺纹杆4进行转动,第一螺纹杆4带动第一螺纹套5进行向左或向右的水平移动,从而带动两个炮雾机15进行水平移动;待炮雾机15调节到预定水平位置后,中央处理器19启动第一电动伸缩杆6,使炮雾机15达到预定的高度;
49.s22、待高度调节完毕后,中央处理器19启动驱动电机9,驱动电机9的输出轴带动
第二螺纹杆10进行转动,第二螺纹杆10通过第一滑块24和滑槽25的相互配合带动第二螺纹套11进行前后移动,并通过横板13使得使得炮雾机15达到前后预定位置,中央处理器19启动第二电动伸缩杆16,第二电动伸缩杆16对炮雾机15的水平角度进行调节;
50.s23、待两个炮雾机15到达预定位置后,中央处理器19启动两个炮雾机15,炮雾机15将水进行加压后雾化并高压喷射出去,使得射出的水雾在一定范围内形成一张幕网结构,从而将漂浮的风尘颗粒包裹并通过自身重力作用做自由落体运动,从而达到降尘的作用,使得完毕后中央处理器19会自动将炮雾机15恢复到初始位置,从而完成除尘降尘工作。
51.本实施例中采用双轴电机3控制两个输出轴转速相同的喷雾机15,同时利用转动架14和第二电动伸缩杆16的相互配合,保证喷头的雾化效果和雾化角度,大大减少耗水量,增加尘粒与水滴的碰撞几率和速度,提高除尘效率,使含尘气体的湿度增加,尘粒相互凝聚体积增大而沉积,达到降尘的目的;其次,通过粉尘浓度传感器17实现节能,从而达到每小时耗水量少,比洒水车更省水的效果,达到空气净化的效果。同时,利用转动架14和第二电动伸缩杆16的相互配合,实现喷出的水雾像细雨一样随风飘散,飘在脸上就像出了一层汗水,丝毫不会喷湿衣服,也不会在空气中出现浑浊,水雾越细小,反而越容易吸附细颗粒物。
52.以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1