一种高压输电线表面自动涂覆绝缘材料的机器人的制作方法
1.本发明涉及架空裸电线绝缘化技术领域,具体涉及一种高压输电线表面自动涂覆绝缘材料的机器人。
背景技术:
2.目前部分架空的高压输电线是采用裸电线的,但是裸电线的线芯暴露在大气环境中易遭腐蚀,形成安全隐患。同时部分有绝缘层的高压导线由于其绝缘层长期暴露在室外环境中,遭到日晒雨淋等环境因素的影响,出现了老化现象,使绝缘层失去了原有的功能,所以需要对部分裸电线或者部分绝缘层老化的电线进行绝缘化处理。而在更换绝缘导线时,需要进行停电作业,这样就存在线路停电时间长、人员登杆作业危险性高以及影响架空线路可靠性指标等问题。目前也有涂覆机器人进行涂覆作业,但是大多数的涂覆机器人都是直接进行涂覆作业,由于长期暴露在室外环境中的高压输电线经过风吹雨淋,多少都会存积杂物在其表面,如果不将这些杂物清理除去,明显会影响后期涂覆绝缘材料的效果。
技术实现要素:
3.本发明要解决的技术问题是提供一种具有能在涂覆绝缘材料前对杂物进行清理,从而提高涂覆效果的高压输电线表面自动涂覆绝缘材料的机器人。
4.为解决上述技术问题,本发明提供一种高压输电线表面自动涂覆绝缘材料的机器人,包括涂覆机器人本体,涂覆机器人本体的外部设置有线体清理装置,线体清理装置包括定向清理装置和旋转清理装置,定向清理装置包括支架,支架与涂覆机器人本体之间活动连接,支架上设置有上半盖体和下半盖体,上半盖体和下半盖体均为弧形状结构,且上半盖体和下半盖体的弧形开口相对,旋转清理装置包括外壳体,外壳体设置在涂覆机器人本体的侧壁上,外壳体上通过带扭簧的转轴铰接有电机保护套,电机保护套内固定设置有伺服电机,伺服电机的输出轴上设置有驱动齿轮,电机保护套的顶部固定设置有驱动盒,驱动盒顶面上平行间隔设置有左挡环和右挡环,左挡环和右挡环之间转动设置有清理环,清理环、左挡环和右挡环三者共轴线,清理环的外周壁上设有弧形齿板,且驱动齿轮与弧形齿板相啮合。
5.优选的,所述外壳体远离涂覆机器人本体的侧壁上设置有清理装置容纳腔,清理装置容纳腔内固定设置有伸缩气缸,伸缩气缸的伸缩杆上通过带扭簧的转轴铰接有电机保护套,便于在不使用的时候,可通过伸缩气缸将电机保护套收纳至清理装置容纳腔内。
6.优选的,所述支架的一侧壁上通过带扭簧的转动杆转动连接有上半盖体和下半盖体,上半盖体的一侧壁上设置有弧形调节杆槽,弧形调节杆槽内活动设置有调节环,调节环的中间位置处固定贯穿设置有调节杆,且调节杆的一端活动贯穿弧形调节杆槽至上半盖体内,调节杆的另一端活动套设有触碰套,调节杆的一端外部还套设有回位弹簧,调节环的两端还均固定设置有卡脚,下半盖体的一侧壁上设置有固定环,固定环为弧形状结构,固定环的开口两端分别设置有与卡脚一一对应的卡脚槽,且卡脚分别活动卡设在相应位置的卡脚
槽内,便于当未安装旋转清理装置时,在对高压输电线表面涂覆绝缘材料时,调节杆另一端的触碰套碰触到外界物体时,通过将调节杆向上半盖体内进行挤压,使得卡脚从相应的卡脚槽内脱离,此时可在带扭簧的转动杆的作用下,使得上半盖体和下半盖体均以带扭簧的转动杆为轴进行转动、且各自向相反的方向翻转(即靠近涂覆机器人本体的方向,此时可使得涂覆机器人本体继续前进进行涂覆绝缘材料)。
7.优选的,所述左挡环和右挡环均为圆环状结构,且左挡环和右挡环相对立的内壁上分别设置有左环形导槽和右环形导槽,清理环的对立两侧分别设置有与左环形导槽和右环形导槽相适配的左导环和右导环,左导环和右导环均为圆弧形状结构,且左导环和右导环分别滑动设置在左环形导槽和右环形导槽内,使得清理环可在左挡环和右挡环之间进行往复转动。
8.优选的,所述清理环包括上半圆环体和下半圆环体,上半圆环体的两端开口上均设置有卡块,下半圆环体的两端开口上均设置有与卡块一一对应的卡槽,卡块分别活动卡设在相对应的卡槽内,左导环和右导环分别设置在上半圆环体的对立两侧,弧形齿板设置在下半圆环体的外周壁上,便于将卡块分别活动卡设在相对应的卡槽内,使得上半圆环体和下半圆环体合并成一个圆环体,进而可通过上半圆环体和下半圆环体对高压输电线表面进行清理。
9.优选的,所述卡脚的一端与调节环之间固定连接,卡脚的另一端顶面上设置有弹性球体,卡脚槽的顶部内壁上设置有与弹性球体相适配的半球形槽,且当卡脚卡设在卡脚槽内后,弹性球体卡入至半球形槽内,有利于使得上半圆环体和下半圆环体合并成一个圆环体后更牢固,不容易分开。
10.优选的,所述支架通过若干连接螺栓连接在涂覆机器人本体的侧壁上,便于在不使用定向清理装置时方便拆卸。
11.优选的,所述固定环远离支架的侧壁上还通过若干缓冲弹簧连接有集尘塔,集尘塔包括若干共轴线、且直径依次递减的半弧形板组成,相邻的两个半弧形板之间固定连接,且半弧形板的弧形开口方向与固定环的弧形开口方向相同,通过集尘塔便于对高压输电线表面下方的杂物或积水进行清理,有利于提高绝缘材料涂覆的效果。
12.本发明的有益效果:(1)通过设置的定向清理装置和旋转清理装置,能根据使用需要选择单独使用定向清理装置或旋转清理装置、或同时使用定向清理装置和旋转清理装置,对高压输电线在涂覆绝缘材料前进行表面清理工作,以便提高后期涂覆绝缘材料的效果;(2)旋转清理装置中的伺服电机通过驱动齿轮带动弧形齿板,实现弧形齿板正反交替转动,进而可使得清理环可在左挡环和右挡环之间进行往复转动,进而可通过上半圆环体的弧形内壁刮除高压输电线的表面的污垢,提高了高压输电线表面的清洁度;(3)定向清理装置中设置的触碰套,便于当触碰套碰触到外界物体,即可将调节杆向上半盖体内进行挤压,使得卡脚从相应的卡脚槽内脱离,此时可在带扭簧的转动杆的作用下,使得上半盖体和下半盖体均以带扭簧的转动杆为轴进行转动、且各自向相反的方向翻转,进而可使得涂覆机器人本体继续在近高压输电线上前进进行涂覆绝缘材料,使得不会因上半盖体和下半盖体的设置影响涂覆的距离。
附图说明
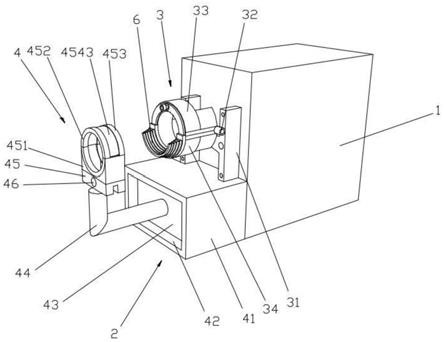
13.附图用来提供对本发明的优选的理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:图1为本发明一种高压输电线表面自动涂覆绝缘材料的机器人的结构示意图;图2为本发明一种高压输电线表面自动涂覆绝缘材料的机器人的定向清理装置结构示意图;图3为本发明一种高压输电线表面自动涂覆绝缘材料的机器人的弧形调节杆槽位置示意图;图4为本发明一种高压输电线表面自动涂覆绝缘材料的机器人的弹性球体位置示意图;图5为本发明一种高压输电线表面自动涂覆绝缘材料的机器人的固定环结构示意图;图6为图5中a处结构放大示意图;图7为本发明一种高压输电线表面自动涂覆绝缘材料的机器人的清理环结构爆炸示意图;图8为本发明一种高压输电线表面自动涂覆绝缘材料的机器人的集尘塔结构示意图;图9为本发明一种高压输电线表面自动涂覆绝缘材料的机器人的左环形导槽位置示意图;图10为本发明一种高压输电线表面自动涂覆绝缘材料的机器人的右环形导槽位置示意图;附图标记为:1、涂覆机器人本体;2、线体清理装置;3、定向清理装置;31、支架;32、带扭簧的转动杆;33、上半盖体;34、下半盖体;341、固定环;342、卡脚槽;35、弧形调节杆槽;36、调节环;361、卡脚;362、半球形槽;363、弹性球体;37、调节杆;38、触碰套;39、回位弹簧;4、旋转清理装置;41、外壳体;42、清理装置容纳腔;43、伸缩气缸;44、带扭簧的转轴;45、电机保护套;451、驱动盒;452、左挡环;4521、左环形导槽;453、右挡环;4531、右环形导槽;454、清理环;4541、左导环;4542、右导环;4543、上半圆环体;4544、下半圆环体;4545、卡块;4546、卡槽;455、弧形齿板;46、伺服电机;47、驱动齿轮;5、连接螺栓;6、集尘塔;61、缓冲弹簧;62、半弧形板。
具体实施方式
14.下面结合附图描述本发明的具体实施方式。
15.如图1-10所示,为本实施例的一种高压输电线表面自动涂覆绝缘材料的机器人,包括涂覆机器人本体1,涂覆机器人本体1的外部设置有线体清理装置2,线体清理装置2包括定向清理装置3和旋转清理装置4,定向清理装置3包括支架31,支架31与涂覆机器人本体1之间活动连接,支架31上设置有上半盖体33和下半盖体34,上半盖体33和下半盖体34均为弧形状结构,且上半盖体33和下半盖体34的弧形开口相对,旋转清理装置4包括外壳体41,外壳体41设置在涂覆机器人本体1的侧壁上,外壳体41上通过带扭簧的转轴44铰接有电机保护套45,电机保护套45内固定设置有伺服电机46,伺服电机46的输出轴上设置有驱动齿
轮47,电机保护套45的顶部固定设置有驱动盒451,驱动盒451顶面上平行间隔设置有左挡环452和右挡环453,左挡环452和右挡环453之间转动设置有清理环454,清理环454、左挡环452和右挡环453三者共轴线,清理环454的外周壁上设有弧形齿板455,且驱动齿轮47与弧形齿板455相啮合。
16.外壳体41远离涂覆机器人本体1的侧壁上设置有清理装置容纳腔42,清理装置容纳腔42内固定设置有伸缩气缸43,伸缩气缸43的伸缩杆上通过带扭簧的转轴44铰接有电机保护套45,便于在不使用的时候,可通过伸缩气缸43将电机保护套45收纳至清理装置容纳腔42内,支架31的一侧壁上通过带扭簧的转动杆32转动连接有上半盖体33和下半盖体34,上半盖体33的一侧壁上设置有弧形调节杆槽35,弧形调节杆槽35内活动设置有调节环36,调节环36的中间位置处固定贯穿设置有调节杆37,且调节杆37的一端活动贯穿弧形调节杆槽35至上半盖体33内,调节杆37的另一端活动套设有触碰套38,调节杆37的一端外部还套设有回位弹簧39,调节环36的两端还均固定设置有卡脚361,下半盖体34的一侧壁上设置有固定环341,固定环341为弧形状结构,固定环341的开口两端分别设置有与卡脚361一一对应的卡脚槽342,且卡脚361分别活动卡设在相应位置的卡脚槽342内,便于当未安装旋转清理装置4时,在对高压输电线表面涂覆绝缘材料时,调节杆37另一端的触碰套38碰触到外界物体时,通过将调节杆37向上半盖体33内进行挤压,使得卡脚361从相应的卡脚槽342内脱离,此时可在带扭簧的转动杆32的作用下,使得上半盖体33和下半盖体34均以带扭簧的转动杆32为轴进行转动、且各自向相反的方向翻转(即靠近涂覆机器人本体1的方向,此时可使得涂覆机器人本体1继续前进进行涂覆绝缘材料),左挡环452和右挡环453均为圆环状结构,且左挡环452和右挡环453相对立的内壁上分别设置有左环形导槽4521和右环形导槽4531,清理环454的对立两侧分别设置有与左环形导槽4521和右环形导槽4531相适配的左导环4541和右导环4542,左导环4541和右导环4542均为圆弧形状结构,且左导环4541和右导环4542分别滑动设置在左环形导槽4521和右环形导槽4531内,使得清理环454可在左挡环452和右挡环453之间进行往复转动,清理环454包括上半圆环体4543和下半圆环体4544,上半圆环体4543的两端开口上均设置有卡块4545,下半圆环体4544的两端开口上均设置有与卡块4545一一对应的卡槽4546,卡块4545分别活动卡设在相对应的卡槽4546内,左导环4541和右导环4542分别设置在上半圆环体4543的对立两侧,弧形齿板455设置在下半圆环体4544的外周壁上,便于将卡块4545分别活动卡设在相对应的卡槽4546内,使得上半圆环体4543和下半圆环体4544合并成一个圆环体,进而可通过上半圆环体4543和下半圆环体4544对高压输电线表面进行清理,卡脚361的一端与调节环36之间固定连接,卡脚361的另一端顶面上设置有弹性球体363,卡脚槽342的顶部内壁上设置有与弹性球体363相适配的半球形槽362,且当卡脚361卡设在卡脚槽342内后,弹性球体363卡入至半球形槽362内,有利于使得上半圆环体4543和下半圆环体4544合并成一个圆环体后更牢固,不容易分开,支架31通过若干连接螺栓5连接在涂覆机器人本体1的侧壁上,便于在不使用定向清理装置3时方便拆卸,固定环341远离支架31的侧壁上还通过若干缓冲弹簧61连接有集尘塔6,集尘塔6包括若干共轴线、且直径依次递减的半弧形板62组成,相邻的两个半弧形板62之间固定连接,且半弧形板62的弧形开口方向与固定环341的弧形开口方向相同,通过集尘塔6便于对高压输电线表面下方的杂物或积水进行清理,有利于提高绝缘材料涂覆的效果。
17.本发明的工作原理是:当需要对高压输电线表面涂覆绝缘材料时,可根据需要选
择是否使用定向清理装置3和旋转清理装置4,即可分别单独使用定向清理装置3或旋转清理装置4、亦可同时使用定向清理装置3和旋转清理装置4;当单独使用定向清理装置3时,外壳体41可与涂覆机器人本体1的侧壁之间采用可拆卸连接(即可通过螺栓连接的方式),即可将旋转清理装置4整体拆卸下,将支架31通过若干连接螺栓5连接在涂覆机器人本体1的侧壁上,在将涂覆机器人本体1安装在高压输电线上时,由于上半盖体33和下半盖体34均为弧形状结构,且上半盖体33和下半盖体34的弧形开口相对,即可使得高压输电线位于上半盖体33和下半盖体34之间,再使得调节环36开口两端的卡脚361分别活动卡设在固定环341的开口两端相应位置的卡脚槽342内,此时弹性球体363卡入至半球形槽362内,使得上半圆环体4543和下半圆环体4544合并成一个圆环体后更牢固,即可使得高压输电线位于上半盖体33和下半盖体34形成的圆环体中间,随着涂覆机器人本体1的前进,上半圆环体4543和下半圆环体4544的弧形内壁可先与高压输电线的表面接触,进而可刮除高压输电线的表面的污垢,提高了高压输电线表面的清洁度,即上半圆环体4543和下半圆环体4544先经过的高压输电线的位置、再由涂覆机器人本体1经过进行涂覆绝缘材料;当涂覆机器人本体1行走至将近高压输电线的尽头时,由调节杆37另一端的触碰套38碰触到外界物体,即可将调节杆37向上半盖体33内进行挤压,使得卡脚361从相应的卡脚槽342内脱离,此时可在带扭簧的转动杆32的作用下,使得上半盖体33和下半盖体34均以带扭簧的转动杆32为轴进行转动、且各自向相反的方向翻转(即靠近涂覆机器人本体1的方向,此时可使得涂覆机器人本体1继续在近高压输电线上前进进行涂覆绝缘材料);当单独使用旋转清理装置4时,可将支架31从涂覆机器人本体1的侧壁上拆卸下即可,先通过伸缩气缸43将带扭簧的转轴44和电机保护套45推动至清理装置容纳腔42的外部,此时电机保护套45在带扭簧的转轴44的作用下翻转(如附图1所示状态),再将上半圆环体4543两端开口的卡块4545分别卡设在下半圆环体4544两端开口上相对应的卡槽4546内,使得上半圆环体4543和下半圆环体4544合并成一个圆环体,进而使得高压输电线位于上半圆环体4543和下半圆环体4544形成的圆环体中间,启动电机保护套45内的伺服电机46实现正反交替转动,由于伺服电机46的输出轴上设置有驱动齿轮47,且驱动齿轮47与弧形齿板455相啮合,因此可实现弧形齿板455正反交替转动;同时由于左挡环452和右挡环453相对立的内壁上分别设置有左环形导槽4521和右环形导槽4531、左导环4541和右导环4542均为圆弧形状结构,且左导环4541和右导环4542分别滑动设置在左环形导槽4521和右环形导槽4531内起到导向作用,使得清理环454可在左挡环452和右挡环453之间进行往复转动,进而可通过上半圆环体4543的弧形内壁刮除高压输电线的表面的污垢,提高了高压输电线表面的清洁度;也可将左挡环452和右挡环453均分别设置成两个半圆环体,采用拼接的方式最终使得左挡环452和右挡环453形成一个闭合的圆环体,便于在进行涂覆绝缘材料前,高压输电线可穿过左挡环452和右挡环453的内圆;或者也可在左挡环452和右挡环453上开设有可供高压输电线的直径通过的缺口(此缺口在附图中省略未画出),便于将高压输电线通过该缺口进入至左挡环452和右挡环453的内圆,方便左挡环452和右挡环453安装,同时缺口的设置可在左挡环452和右挡环453上非左环形导槽4521和右环形导槽4531的位置处,以便清理环454可在左挡环452和右挡环453之间进行往复转动时,不会与左导环4541和右导环4542之间产生干涉;
还可根据不同的需要,在上半盖体33和下半盖体34的弧形内壁、上半圆环体4543的弧形内壁上设置毛刷体或泡沫海绵,有利于提高对高压输电线表面的清洁效果。
18.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1