用于柱状结构的多自由度喷涂机器人
1.本实用新型属于装配式建筑制造业中的自动化设备领域,具体涉及一种用于柱状结构的多自由度喷涂机器人。
背景技术:
2.喷涂机器人又叫喷漆机器人,是可进行自动喷漆或喷涂其他涂料的工业机器人。由于喷涂机器人具有喷涂质量稳定、效率高、安全环保等特点,被广泛应用于工程机械、航空航天、家具轻工等各行各业,特别是对于汽车制造业来说,喷涂机器人已经成为不可或缺的自动化设备。现有技术中,喷漆机器人主要由机器人本体、计算机和相应的控制系统组成;多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动。较先进的喷漆机器人腕部采用柔性手腕,既可向各个方向弯曲,又可转动,其动作类似人的手腕,能方便地通过较小的孔伸入工件内部,喷涂其内表面。使用喷涂机器人,不但保证了喷涂工作顺利安全地进行,也减少了资源使用和污染,更利于满足环保要求。
3.装配式建筑是指把传统建造方式中的大量现场作业工作转移到工厂进行,在工厂加工制作好建筑用构件和配件,运输到建筑施工现场,通过可靠的连接方式在现场装配安装而成的建筑。发展装配式建筑是建造方式的重大变革,有利于节约资源能源、减少施工污染、提升劳动生产效率和质量安全水平。由于装配式建筑的构件和配件结构的多样化,现有喷涂机不能满足装配式构件的使用要求,目前多采用浸泡或手持喷枪进行人工喷涂的方式。这种喷涂方式不但喷涂效率较低,而且容易将涂料沾染到衣物上,此外未附着在物体表面的涂料弥漫在空气中,还会造成污染。
技术实现要素:
4.针对现有技术中喷涂机不能满足装配式构件的使用要求的现状,本实用新型提供了一种用于柱状结构的多自由度喷涂机器人。所述多自由度喷涂机器人解决了装配式构件柱喷涂过程喷涂效率低、容易造成污染的技术问题。
5.本实用新型的技术方案:
6.用于柱状结构的多自由度喷涂机器人,包括移动平台底座和设置在移动平台底座上的旋转平台。所述移动平台底座上设置底座支撑架,并通过底座支撑架与旋转平台连接。
7.所述旋转平台上设置两个相对而立的移动架,每个所述移动架上设置直线导轨,并通过其与旋转机械手连接。所述移动架为由四根铝型材组成的框架,所述移动架上设置一端与伺服电机相连的滚珠丝杠,所述滚珠丝杠上设置直线导轨,并通过直线导轨与旋转机械手相连接。
8.所述旋转机械手包括喷枪以及设置在钣金外壳内部的锥齿轮、二级步进电机、联轴器和一级步进电机。所述一级步进电机通过旋转轴i与联轴器相连,所述联轴器带动二级步进电机;所述二级步进电机通过旋转轴ii与锥齿轮连接,驱动锥齿轮转动;所述锥齿轮与
喷枪的旋转轴iii相连接,实现喷枪的角度调节。所述钣金外壳的底部通过钣金连接件与移动架上的直线导轨连接。其中,所述旋转机械手还包括喷枪固定架,所述喷枪通过喷枪固定架与钣金外壳固定连接。本实用新型所述的喷涂机器人设置两只喷枪,由于喷枪设置在旋转机械手上,而旋转机械手设置在移动架的直线导轨上,通过旋转机械手在直线导轨上的移动而实现对装配式构件的前、后两侧面进行全面喷涂。同时,移动架设置在旋转平台上,当前、后两个侧面喷涂完毕后,通过旋转平台将喷枪旋转至未喷涂的两个侧面,从而实现了对四个侧面的全面喷涂。
9.本实用新型的有益效果:
10.(1)本实用新型所述的多自由度喷涂机器人不但解决了装配式构件柱喷涂过程喷涂效率低、容易造成污染的技术问题,降低了易燃易爆的喷涂环境对人的危害,安全性高。
11.(2)本实用新型所述的多自由度喷涂机器人,通过旋转平台、旋转机械手和移动架的结合,实现了成对预制构件柱各个面的喷涂。
附图说明
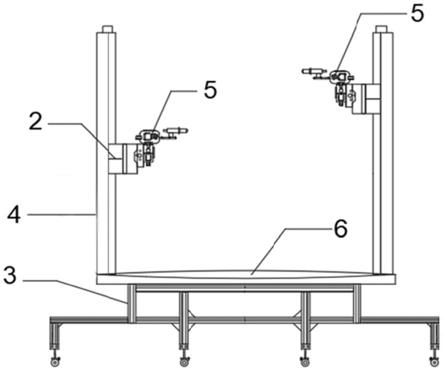
12.图1是本实用新型所述的多自由度喷涂机器人的结构示意图;
13.图2是本实用新型所述的多自由度喷涂机器人的旋转机械手的结构示意图;
14.图3是本实用新型中旋转机械手的喷枪移动方向的示意图;
15.图4是本实用新型所述的多自由度喷涂机器人的移动平台底座的结构示意图。
16.其中,1、移动平台底座,2、二自由度旋转机械手,3、底座支撑架,4、连接二自由度移动平面和底座支撑架的连接杆,5、固定喷枪,6、旋转平台,7、锥齿轮,8、二级步进减速电机,9、连接一级旋转机构和二级旋转机构的轴,10、喷枪固定架,11、钣金连接件,12、钣金件。
具体实施方式
17.下面结合实施例对本实用新型做进一步的说明。
18.用于柱状结构的多自由度喷涂机器人,包括移动平台底座1和设置在移动平台底座1上的旋转平台6。所述移动平台底座1上设置底座支撑架3,并通过底座支撑架3与旋转平台6连接。
19.所述旋转平台6上设置两个相对而立的移动架4,每个所述移动架4上设置直线导轨,并通过其与旋转机械手2连接。所述移动架4为由四根铝型材组成的框架,所述移动架4上设置一端与伺服电机相连的滚珠丝杠,所述滚珠丝杠上设置直线导轨,并通过直线导轨与旋转机械手2相连接。
20.所述旋转机械手2包括喷枪5以及设置在钣金外壳12内部的锥齿轮7、二级减速电机8、联轴器9和一级减速电机15。所述一级步进电机15通过旋转轴i与联轴器9相连,所述联轴器9带动二级步进电机(8);所述二级步进电机8通过旋转轴ii与锥齿轮7连接,驱动锥齿轮7转动;所述锥齿轮7与喷枪5的旋转轴iii相连接,实现喷枪5的角度调节。所述钣金外壳12的底部通过钣金连接件11与移动架4上的直线导轨连接。其中,所述旋转机械手2还包括喷枪固定架10,所述喷枪5通过喷枪固定架10与钣金外壳12固定连接。
21.本实用新型所述的喷涂机器人设置两只喷枪,由于喷枪5设置在旋转机械手2上,
而旋转机械手2设置在移动架4的直线导轨上,通过旋转机械手2在直线导轨上的移动而实现对装配式构件的前、后两侧面进行全面喷涂。同时,移动架4设置在旋转平台6上,当前、后两个侧面喷涂完毕后,通过旋转平台6将喷枪旋转至未喷涂的两个侧面,从而实现了对四个侧面的全面喷涂。
技术特征:
1.用于柱状结构的多自由度喷涂机器人,其特征在于:包括移动平台底座(1)和设置在移动平台底座(1)上的旋转平台(6);所述旋转平台(6)上设置两个相对而立的移动架(4),每个所述移动架(4)上设置直线导轨,并通过其与旋转机械手(2)连接;所述旋转机械手(2)包括喷枪(5)以及设置在钣金外壳(12)内部的锥齿轮(7)、二级步进电机(8)、联轴器(9)和一级步进电机(15),所述一级步进电机(15)通过旋转轴i与联轴器(9)相连,所述联轴器(9)带动二级步进电机(8),所述二级步进电机(8)通过旋转轴ii与锥齿轮(7)连接,驱动锥齿轮(7)转动;所述锥齿轮(7)与喷枪(5)的旋转轴iii相连接,实现喷枪(5)的角度调节。2.根据权利要求1所述的多自由度喷涂机器人,其特征在于:所述钣金外壳(12)的底部通过钣金连接件(11)与移动架(4)上的直线导轨连接。3.权利要求1所述的多自由度喷涂机器人,其特征在于:所述旋转机械手(2)包括喷枪固定架(10),所述喷枪(5)通过喷枪固定架(10)与钣金外壳(12)固定连接。4.根据权利要求2所述的多自由度喷涂机器人,其特征在于:所述移动架(4)为由四根铝型材组成的框架,所述移动架(4)上设置一端与伺服电机相连的滚珠丝杠,所述滚珠丝杠上设置直线导轨,并通过直线导轨与旋转机械手(2)的钣金连接件(11)相连接。5.根据权利要求1-4中任意一项所述的多自由度喷涂机器人,其特征在于:所述移动平台底座(1)上设置底座支撑架(3),并通过底座支撑架(3)与旋转平台(6)连接。
技术总结
本实用新型提供了一种用于柱状结构的多自由度喷涂机器人,包括移动平台底座和设置在移动平台底座上的旋转平台。所述旋转平台上设置两个相对而立的移动架,每个所述移动架上设置直线导轨,并通过其与旋转机械手连接。所述旋转机械手包括喷枪以及设置在钣金外壳内部的锥齿轮、二级步进电机、联轴器和一级步进电机。所述一级步进电机通过旋转轴I与联轴器相连,所述联轴器带动二级步进电机;所述二级步进电机通过旋转轴II与锥齿轮连接,驱动锥齿轮转动;所述锥齿轮与喷枪的旋转轴III相连接,实现喷枪的角度调节。所述多自由度喷涂机器人解决了装配式构件柱喷涂过程喷涂效率低、容易造成污染的技术问题。成污染的技术问题。成污染的技术问题。
技术研发人员:苏雨 于桢琪 郭轩铭 苏亚辉 卢佳斌 梁瀚文 贾小玥 韩云鹏 冯超
受保护的技术使用者:青岛理工大学
技术研发日:2021.06.12
技术公布日:2022/1/11
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1