一种药液原料自动加工设备的制作方法
1.本实用新型属于加工设备,特别涉及一种药液原料自动加工设备。
背景技术:
2.当前在生产药液原料的过程中出料清锅作业完全为人工方式,因材料为粘度较大的易燃品,操作不当可能对人身安全造成伤害。人工清锅,力度控制全凭经验,对人员经验要求较高,工人劳动强度大,动作不敢加快,不利于生产效率的提高。特别是药液挂壁太多,浪费严重;药液易燃,人工清理非常危险。
技术实现要素:
3.本发明目的在于克服上述技术不足,提供一种在安全护栏中装翻转机构、刮料机构和机器人等主城的一种药液原料自动加工设备。
4.本实用新型解决技术问题所采用的技术方案是:一种药液原料自动加工设备,包括用钢丝网和立柱组成的方式安全护栏,两端设有通道,其特征在于后面的通道口装有混合锅,混合锅前面左侧装有翻转机构,右侧装有刮料机器人,在刮料机器人的机械手上装有防爆摄像机,刮料机器人与翻转机构之间的混合锅腔中装有刮料机构,在混合锅的出口下面装有电子称重器,电子称重器上面放有接料盆;在安全护栏右侧壁内装有电气控制柜。
5.所述的混合锅,包括圆锥形的混合锅壳体,在混合锅壳体上端两侧焊接有吊装耳,底面固定有锥形混合锅支架,混合锅支架下面装有万向轮。
6.所述的翻转机构,包括用槽钢焊接的底座,在底座下面四个角装有地脚,上面左侧中间装有驱动电机,驱动电机的轴与蜗轮螺杆变速器中的蜗杆固定连接传动,蜗杆与蜗轮相啮合,蜗轮与固定机构中的转轴连接传动,转轴两端装在设备主体中直角形的支撑座一和支撑座二中的轴承中;支撑座一与支撑座二之间装有连接板,连接板中间装有三色灯;转轴两侧上固定有固定立柱,两个固定立柱之间固定一个半圆形的混合锅托座,在左侧的混合锅托座左侧焊接一个压杆座,在压杆座上用轴铰接一个弯形的压杆,在压杆上端装有压滚;支撑座一焊接在底座二上,底座二与支撑座一之间焊接有加强筋;底座二、支撑座一和支撑座二均焊接在底座上面。
7.所述的刮料机构,包括后支座,后支座的圆盘上设安装孔,左端装有六维力传感器,六维力传感器右端固定两个前支座,在两个前支座之间用多个铆钉固定有木嵌板和牛筋板,牛筋板固定在木嵌板中间设的凹槽中。
8.本实用新型的有益效果是:该实用新型生产药液实现了清锅自动化,力度控制准确,生产效率高,减小了浪费,劳动强度低,确保了人身安全。
附图说明
9.以下结合附图,以实施例具体说明。
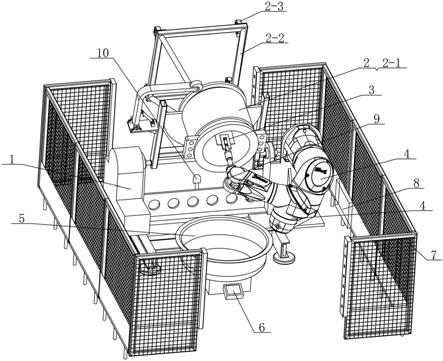
10.图1是一种自动上舱的装配设备的三维图;
11.图2是图1的俯视图;
12.图3是图1中翻转机构的三维图;
13.图4是图1中混合锅的三维图;
14.图5是图4中刮锅时的三维图;
15.图6是图1中刮料机构的三维图。
16.图中:1-翻转机构;1-1-驱动电机;1-2-蜗轮蜗杆变速器;1-3-轴承;1-4-固定机构;1-4-1-压杆座;1-4-2-压杆;1-4-3-压滚;1-4-4
‑‑
转轴;1-4-5-混合锅托座;1-4-6-固定立柱;1-5-设备主体;1-5-1-底座二;1-5-2-加强筋;1-5-3-支撑座一;1-5-4-支撑座二;1-5-5-连接板;1-6-地脚;1-7-底座;2-混合锅;2-1-混合锅壳体;2-2-混合锅支架;2-3-万向轮;2-4-吊装耳;3-刮料机构;3-1-牛筋板;3-2-木嵌板;3-2-1-凹槽;3-3-前支座;3-4-六维力传感器;3-5-后支座;3-5-1-安装孔;3-6-铆钉;4-刮料机器人;5-接料盆;6-电子称重器;7-安全护栏;8-电气控制柜;9-防爆摄像机;10-三色灯。
具体实施方式
17.实施例,参照附图,一种药液原料自动加工设备,包括用钢丝网和立柱组成的方式安全护栏7,两端设有通道,其特征在于后面的通道口装有混合锅2,混合锅2前面左侧装有翻转机构1,右侧装有刮料机器人4,在刮料机器人4的机械手上装有防爆摄像机9,刮料机器人4与翻转机构1之间的混合锅2腔中装有刮料机构3,在混合锅2的出口下面装有电子称重器6,电子称重器6上面放有接料盆5;在安全护栏7右侧壁内装有电气控制柜8。
18.所述的混合锅2,包括圆锥形的混合锅壳体2-1(见附图4),在混合锅壳体2-1上端两侧焊接有吊装耳2-4,底面固定有锥形混合锅支架2-2,混合锅支架2-2下面装有万向轮2-3。
19.所述的翻转机构1(见附图3),包括用槽钢焊接的底座1-7,在底座1-7下面四个角装有地脚1-6,上面左侧中间装有驱动电机1-1,驱动电机1-1的轴与蜗轮螺杆变速器1-2中的蜗杆固定连接传动,蜗杆与蜗轮相啮合,蜗轮与固定机构1-4中的转轴1-4-4连接传动,转轴1-4-4两端装在设备主体1-5中直角形的支撑座一1-5-3和支撑座二1-5-4中的轴承1-3中;支撑座一1-5-3与支撑座二1-5-4之间装有连接板1-5-5,连接板1-5-5中间装有三色灯10;转轴1-4-4两侧上固定有固定立柱1-4-6,两个固定立柱1-4-6之间固定一个半圆形的混合锅托座1-4-5,在左侧的混合锅托座1-4-5左侧焊接一个压杆座1-4-1,在压杆座1-4-1上用轴铰接一个弯形的压杆1-4-2,在压杆1-4-2上端装有压滚1-4-3;支撑座一1-5-3焊接在底座二1-5-1上,底座二1-5-1与支撑座一1-5-3之间焊接有加强筋1-5-2;底座二1-5-1、支撑座一1-5-3和支撑座二1-5-4均焊接在底座1-7上面。
20.所述的刮料机构3(见附图6),包括后支座3-5,后支座3-5的圆盘上设安装孔3-5-1,左端装有六维力传感器3-4,六维力传感器3-4右端固定两个前支座3-3,在两个前支座3-3之间用八个铆钉3-6固定有木嵌板3-2和牛筋板3-1,牛筋板3-1固定在木嵌板3-2中间设的凹槽3-2-1中。
21.本实用新型中的刮料机器人4、驱动电机1-1、防爆摄像机9、六维力传感器3-4、三色灯10和电子称重器6均用电缆与电气控制柜8中的电路控制板连通,并通过预先编程,采用plc进行自动控制。
22.本实用新型的工作过程是:
23.(1)人工向混合锅2中上料,将混合锅2装卡到翻转机构1上,在确认已经将接料盆5放置到电子称重器6上;
24.(2)翻转混合锅2:操作人员按电气控制柜4上的启动按钮,设备的翻转机构1中的驱动电机1-1开始旋转,混合锅2在其驱动下,向一侧翻起,锅中的料流出到承载的接料盆5中,当混合锅壳体2-1倾斜达到设定角度后(约20
°
),驱动电机1-1停转,混合锅2停止翻转,并静止在规定的角度;
25.(3)清理混合锅2:出料状态静置达到设定时间后,刮料机器人4启动,挂料机器人4的手臂用螺栓通过后支座3-5上的安装孔将刮料机构3固定在刮料机器人4的手臂上,对锅内残留的料进行清理,设定的动作为:刮锅壁:使牛筋板3-1的刀刃部在上方(或右侧)接触锅壁,刀刃与沿锅壁母线方向平行,刀面弯曲成一定弧度,然后;由上方(或右侧)沿圆周向右(下)方运动,药浆自然堆积在牛筋板3-1上和堆积到下面壁上,将牛筋板3-1移到接料盆5上方,使药浆流入接料盆5中;刮锅底:使用牛筋板3-1端刃接触锅底,尖角部分接触锅底上沿,然后保持锅底接触,沿着锅壁圆弧向右移动,同时转动牛筋板3-1,把药堆积在刀上,或推到下部锅壁上;
26.(4)混合锅2回转:完成清理后,刮料机器人4复位,混合锅2在翻转机构1驱动下回转到水平位置,从后通道位置脱出;
27.(5)装成品的接料盆5移走,废料盆移入,再按照上述过程,清锅中废料作业开始。首先通过称量系统的重量,其次通过监视系统中锅内残留药浆目测情况,最终判断出料作业是否完成。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1