一种多自由度自动喷涂系统的制作方法
1.本发明涉及喷涂技术领域,尤其是涉及一种多自由度自动喷涂系统。
背景技术:
2.产品的生产线,其作业线工序包括焊接、冲压、涂装、动力总成等;其中,涂装的工序中,为提高效率,大部分是利用喷涂机器人进行自动化喷涂作业。
3.相关技术中,为实现全方位地喷涂作业,喷涂机器人常采用六轴机器人,以提高喷涂作业的自动化和全面化;然而,六轴喷涂机器人均安装在地面上,无法适应对喷涂位置要求较高的工件进行喷涂作业,存在待改进之处。
技术实现要素:
4.为了在更多的喷涂位置进行喷涂作业,本技术提供一种多自由度自动喷涂系统。
5.本技术提供的一种多自由度自动喷涂系统采用如下的技术方案:一种多自由度自动喷涂系统,包括间隔设置的两个支撑架,两所述支撑架之间转动设置有行架,所述行架沿其长度方向滑移设置有滑移座,所述行架的转动轴线呈水平并与滑移座的滑移方向垂直设置,所述滑移座上升降设置有升降座,所述升降座上设置有六轴喷涂机器人。
6.通过采用上述技术方案,实际使用中,利用转动设置在行架,进而改变行架的长度方向与水平方向的夹角,进而调节滑移座的滑移方向,同时利用升降座的升降运动,可适应更高位置的喷涂作业,并结合六轴喷涂机器人自身的自由度,可多自由度的喷涂作业,进而可对更多喷涂位置进行喷涂作业。
7.优选的,两所述支撑架上升降设置有升降架,所述行架设置在两个升降架之间,其中一所述升降架上转动连接有转动座,所述转动座与行架的一端之间形成滑移配合,另一所述升降架上转动连接在行架的另一端。
8.通过采用上述技术方案,实际使用中,利用两个升降架的升降运动,以及转动座与行架之间的滑移配合,进而实现行架的转动调节,该种调节方式,可对行架两端的高度进行调节。
9.优选的,所述滑移座与升降座之间设置水平座,所述水平座上设置有用于保持升降座水平状态的平衡转动结构。
10.通过采用上述技术方案,利用滑移座与升降座之间设置的平衡转动结构,在行架转动调节的过程中,可保持升降座处于水平状态。
11.优选的,所述滑移座与行架之间的滑移传动设置为齿轮齿条传动。
12.通过采用上述技术方案,将滑移座与行架之间的传动方式设置为齿轮齿条传动,一方面,实现了滑移传动,另一方面,该种传动方式,具备制动功能。
13.优选的,所述升降座与滑移座之间的升降传动采用丝杆螺母传动。
14.通过采用上述技术方案,将升降座与滑移座之间的升降传动设置为丝杆螺母传
动,进而实现高精度的升降调节。
15.优选的,所述行架沿其长度方向设置有滑轨,所述滑移座上设置有与滑轨形成滑移配合的滑块,所述滑块上设置有驻车机构。
16.通过采用上述技术方案,当行架呈倾斜状态时,利用滑移上设置的驻车机构,提高滑移座自身的制动能力。
17.优选的,所述驻车机构包括制动油缸和阻尼块,所述制动油缸设置在滑移座上,所述阻尼块关于滑轨相对的两侧对称设置有两个,所述驻车机构还包括用于驱动两个阻尼块相向运动的传动组件。
18.通过采用上述技术方案,利用制动油缸,可保证对滑块的制动力,同时利用传动组件,可实现两个阻尼块同步进行相向运动,进而提高自动能力。
19.优选的,所述传动组件包括第一齿条、第二齿条和齿轮,所述第一齿条和第二齿条沿垂直滑轨的长度方向滑移设置在滑移座上,且所述齿轮转动连接在滑移座上并位于第一齿条和第二齿条之间且与其相啮合,所述传动组件还包括传动杆,所述传动杆的一段固定在齿轮上,所述制动油缸的缸体转动连接在滑移座上,所述传动杆的另一端转动连接在制动油缸活塞杆的端部,两所述阻尼块分别安装在第一齿条和第二齿条上。
20.通过采用上述技术方案,实际使用中,利用制动油缸的伸缩运动,带动传动杆的转动,进而带动齿轮的转动,进而带动第一齿条和第二齿条的相向或相背离运动,最终实现两个阻尼块同步进行相向移动,以提高制动效果。
21.综上所述,本技术包括以下至少一种有益技术效果:1.利用转动设置的行架、滑移座和升降座,使得六轴喷涂机器人可实现多自由度的喷涂作业,进而可对更多喷涂位置进行喷涂作业;2.借助两个升降设置在两个支撑架上的升降架,可对行架的两端进行调节作业,同时利用平衡转动结构,保证升降座的水平状态,使得六轴喷涂机器人整体发生偏转,提高喷涂作业的稳定性;3.通过采用齿轮齿条传动,并结合驻车机构,可有效地提高在调节行架时,滑移座在行架上的制动效果。
附图说明
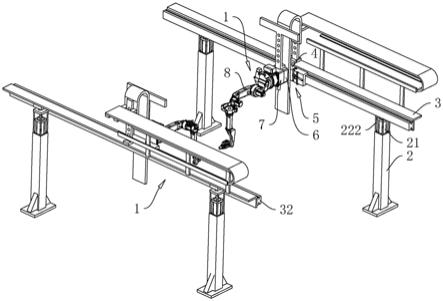
22.图1为本技术实施例主要体现多自由度自动喷涂系统整体结构的轴测示意图;图2为本技术实施例主要体现升降架结构的示意图;图3为本技术实施例主要体现驻车机构结构的示意图。
23.附图标记:1、喷涂部;2、支撑架;21、升降油缸;211、导向槽;22、升降架;221、水平安装座;222、竖直导向杆;3、行架;31、转动座;32、滑轨;4、滑移座;41、滑块;411、滑移槽;412、传动槽;5、驻车机构;51、阻尼块;52、传动组件;521、第一齿条;522、第二齿条;523、齿轮;524、传动杆;53、制动油缸;6、水平座;7、升降座;8、六轴喷涂机器人。
具体实施方式
24.以下结合附图1-3对本技术作进一步详细说明。
25.本技术实施例公开一种多自由度自动喷涂系统。
26.参照图1,多自由度自动喷涂系统包括对称设置的两个喷涂部1,由于任一喷涂部1的结构和安装方式均相同,先以其中一种喷涂部1为例进行阐述。
27.参照图1和图2,喷涂部1包括沿流水线输送方向间隔设置的两个支撑架2,两个支撑架2上均安装有升降油缸21和升降架22,且升降油缸21的活塞杆呈竖直向上设置,升降架22包括一体成型的水平安装座221和四个竖直导向杆222,支撑架2位于升降油缸21的周侧对称开设有四个竖直设置的导向槽211,水平安装座221固定在升降油缸21活塞杆的端部,四个竖直导向杆222与四个导向槽211形成插接滑移配合,进而实现升降架22在支撑架2上的升降运动。
28.参照图1和图2,两个支撑架2之间设置有行架3,其中一个升降架22的水平安装座221上转动连接有转动座31,该转动座31通过导向滑轨与行架3一端的底部实现滑移配合,且滑移方向与行架3的长度方向平行,另一个升降架22的水平安装座221与行架3的另一端实现转动连接,且两个水平安装座221转动连接处的转动轴线呈水平并与行架3的长度方向垂直设置,随着两个升降油缸21的伸缩运动,带动行架3的两端实现转动调节。
29.参照图1和图3,行架3上沿其长度方向滑移设置有滑移座4,该滑移传动的方式采用齿轮齿条传动,以实现滑移座4的滑移;其中,行架3水平方向的一侧沿其长度方向固定有滑轨32,该滑轨32的截面形状设置为t型结构,滑移座4上安装有与滑轨32形成滑移配合的滑块41,且该滑块41与滑轨32的接触面为竖直方向的两侧面。
30.参照图1和图3,为提高滑移座4的制动效果,滑块41设置有驻车机构5,该驻车机构5包括阻尼块51,滑块41关于滑轨32对称的两侧开设有滑移槽411,阻尼块51设置有两个,两个阻尼块51沿竖直方向滑移嵌设在两个滑移槽411内并与滑轨32竖直方向的两侧面形成抵接配合;参照图1和图3,驻车机构5还包括传动组件52,传动组件52包括第一齿条521、第二齿条522和齿轮523,滑块41背离滑移槽411的一侧开设有传动槽412,第一齿条521和第二齿条522滑移嵌设在传动槽412中,两个阻尼块51分别固定在第一齿条521和第二齿条522上,且彼此的滑移方向互相平行,齿轮523转动连接在滑块41上,并位于第一齿条521和第二齿条522之间且与其相啮合;传动组件52还包括传动杆524,传动杆524的一端同轴固定在齿轮523上;驻车机构5还包括制动油缸53,制动油缸53的缸体转动连接在滑块41上,传动杆524的另一端转动连接在制动油缸53活塞杆的端部。
31.参照图1和图3,利用制动油缸53的伸缩运动,带动传动杆524的转动,进而带动齿轮523的转动,进而带动第一齿条521和第二齿条522的相向或相背离运动,最终实现两个阻尼块51同步进行相向移动,以提高制动效果。
32.参照图1,滑移座4上升降设置有水平座6,该滑移座4与水平座6的升降传动采用丝杆螺母传动,以实现高精度的升降调节,水平座6上安装有升降座7,升降座7上安装有六轴喷涂机器人8,其中,水平座6内设置有平衡转动结构,平衡转动结构可采用驱动电机与升降座7相连接以实现保证升降座7的水平状态,另外,该平衡转动结构还可采用陀螺仪以及转动轴承的原理,并结合六轴喷涂机器人8的自重可保持升降座7始终处于水平状态。
33.本技术实施例一种多自由度自动喷涂系统的实施原理为:实际使用中,利用两个升降油缸21,带动行架3的两端进行高度调节,进而调节滑移座4的滑移方向,滑移座4上的齿轮齿条传动,实现滑移座4的移动,在滑移座4移动的过程
中,利用制动油缸53起到双侧制定的功能,另外,利用丝杠螺纹的传动,带动升降座7的升降运动,可适应更高位置的喷涂作业,并结合六轴喷涂机器人8自身的自由度,可多自由度的喷涂作业,进而可对更多喷涂位置进行喷涂作业。
34.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1