一种捣碎机的制作方法
1.本技术涉及捣碎机领域,尤其是涉及一种捣碎机。
背景技术:
2.捣碎机是用于将食物(坚果、水果和蔬菜等)捣碎的设备,捣碎机旋转速度极高,每分钟达到12000转,物料在玻璃杯中通过电机旋转驱动旋刀同时进行劈裂、碾碎、掺合等过程,使物料搅拌捣碎,本机体积小,消耗功率少,工作效率高。
3.相关技术中工作人员在捣碎食物的过程中,一般先将食物放置于容器中,然后手动将食物捣碎。
4.针对上述中的相关技术,发明人认为存在以下缺陷:工作人员手动将食物捣碎的效率低。
技术实现要素:
5.为了提高捣碎机捣碎食物的效率,本技术提供一种捣碎机。
6.本技术提供的一种捣碎机采用如下的技术方案:一种捣碎机,包括机架、升降架、驱动装置、捣碎装置和杯体;所述升降架滑移设置于所述机架上,所述驱动装置设置于所述机架上,所述驱动装置用于驱动所述升降架升降;所述杯体固定于所述机架上,所述杯体用于放置食物;所述捣碎装置固定于所述升降架上,所述捣碎装置用于捣碎食物。
7.通过采用上述技术方案,当需要将食物捣碎时,将食物放置于杯体内部,开启捣碎机,以使驱动装置驱动升降架升降,升降架带动捣碎装置升降,捣碎装置在升降的过程中捣碎杯体内部的食物,从而将食物捣碎;相比于人工手动捣碎食物,不仅提高了捣碎机捣碎食物效率,同时也减小了工作人员的劳动强度。
8.可选的,所述升降架包括第一升降件、第二升降件和缓冲件,所述驱动装置用于驱动所述第一升降件升降;所述第二升降件包括升降块和至少一个导向杆,所述导向杆的底端与所述升降块固定连接,所述导向杆的顶端穿过所述第一升降件并与所述第一升降件滑移配合;所述缓冲件包括第一螺杆和调节块,所述第一螺杆的顶端穿过所述第一升降件并与所述第一升降件螺纹配合,所述第一螺杆的底端穿设于所述调节块并与所述调节块转动连接,所述导向杆穿过所述调节块并与所述调节块滑移配合;所述导向杆上套设有弹簧,所述弹簧的顶端抵接于所述调节块下表面,所述弹簧的底端抵接于所述升降块上表面;所述捣碎装置固定于所述第二升降件上。
9.通过采用上述技术方案,驱动装置在驱动第一升降件下降时,第一升降件带动第一螺杆下降,第一螺杆带动调节块下降,调节块在下降时向下挤压弹簧的顶端,以使弹簧的底端向下挤压升降块升降,升降块带动捣碎装置升降,捣碎装置在捣碎食物的过程中,弹簧对升降块有缓冲作用,从而对捣碎装置有缓冲作用,进而对杯体有保护作用;驱动装置驱动
第一升降件上升时,第一升降件带动第一螺杆上升,第一螺杆带动调节块上升、同时第一升降件带动第二升降件上升,从而使升降块在竖直方向上实现往复运动;升降块在升降的过程中,由于导向杆与第一升降件滑移配合,同时导向杆与调节块滑移配合,从增加了升降块和捣碎装置升降的稳定性;同时工作人员还可以通过旋转第一螺杆来改变调节块的高度,从而改变调节块到升降块之间的距离,进而根据食物的硬度大小来改变弹簧的弹力大小。
10.可选的,所述驱动装置包括电机和偏心轮,所述电机固定于所述机架上,所述电机的输出轴与所述偏心轮固定连接;所述偏心轮上固定设置有偏心杆,所述偏心杆位于所述偏心轮的偏心位置;所述第一升降件上开设有驱动槽,所述偏心杆穿过所驱动槽,所述偏心杆与所述驱动槽滑移配合。
11.通过采用上述技术方案,由于偏心杆位于偏心轮的偏心位置,在捣碎食物的过程中,通过电机驱动偏心轮旋转,偏心轮带动偏心杆旋转,偏心杆与驱动槽滑移配合,从而带动第一升降件实现往复升降,第一升降件带动第二升降件往复升降,第二升降件带动捣碎装置往复升降,从而将食物捣碎。
12.可选的,所述机架上还设置有导向装置,所述导向装置包括至少一个导向机构,所述导向机构包括导轨、第一滑块和第二滑块;所述导轨固定于所述机架上,所述导轨沿竖直方向延伸;所述第一滑块固定于所述第一升降件上,所述第一滑块上开设有第一导槽,所述导轨穿过所述第一导槽,所述第一滑块与所述导轨滑移配合;所述第二滑块固定于所述升降块上,所述第二滑块上开设有第二导槽,所述导轨穿过所述第二导槽,所述第二滑块与所述导轨滑移配合。
13.通过采用上述技术方案,由于导轨同时穿过第一导槽和第二导槽,因此导轨同时对第一滑块和第二滑块均有导向作用,同时增加了第一滑块和第二滑块沿竖直方向滑动的稳定性,从而同时增加了第一升降件和第二升降件升降的稳定性;同时当第二滑块卡死不能沿竖直方向滑动时,以使第二升降件不能沿竖直方向滑动,由于第一升降件与第二升降件之间通过缓冲件相连,当驱动装置驱动第一升降件升降时,在缓冲件的缓冲作用下,第一升降件能实现正常的升降,从而不仅能够实现对食物的捣碎,同时缓冲件对驱动装置、第一升降件和第二升降件均有保护作用。
14.可选的,所述机架上设置有缓冲装置,所述缓冲装置包括至少一个缓冲机构;所述缓冲机构包括承载件和拉簧,所述承载件固定于所述机架上,所述拉簧的顶端套设于所述承载件上,所述拉簧的底端套设于所述第一升降件上。
15.通过采用上述技术方案,承载件将拉簧的顶端与第一升降件连接在一起,拉簧的底端套设于第一升降件上,第一升降件在升降的过程中,拉簧对第一升降件有缓冲作用。
16.可选的,所述机架上设置有用于固定所述杯体的固定组件;所述固定组件包括定位柱、底座和紧固件;所述定位柱固定于所述机架上,所述定位柱上开设有定位孔;所述杯体固定于所述底座上,所述底座包括定位杆,所述定位杆与所述定位孔插接配合;所述紧固件用于固定所述定位杆。
17.通过采用上述技术方案,定位柱上的定位孔对定位杆有定位作用,增加了工作人员将底座放置于机架上的效率,同时增加了底座放置于机架上的稳定性,从而增加了杯体放置于机架上的稳定性;通过紧固件将定位杆固定于定位柱上,以使捣碎机在捣碎食物的过程中,杯体不会晃动。
18.可选的,所述承载件均包括固定块、承载块、第三螺杆和两个螺母;所述固定块固定于所述机架上,所述承载块固定于所述固定块上;所述第三螺杆穿过承载块,第三螺杆与承载块滑移配合;两个所述螺母均套设于所述第三螺杆上,其中一个所述螺母抵接于所述承载块的上表面,另一个所述螺母抵接于所述承载块的下表面;所述拉簧的顶端套设于所述第三螺杆上。
19.通过采用上述技术方案,工作人员便于通过旋转两个螺母来调节第三螺杆的高度,从而调节第三螺杆到螺栓之间的距离,进而调节拉簧的弹力,进而根据食物的硬度大小来改变拉簧的弹力大小。
20.可选的,所述第三螺杆上开设有穿引孔,所述拉簧的顶端穿过所述穿引孔。
21.通过采用上述技术方案,穿引孔对拉簧的顶端有定位作用,增加了工作人员将拉簧的顶端连接于第三螺杆上的便捷性,可选的,所述紧固件包括第二螺杆,所述第二螺杆与所述定位柱螺纹配合,所述第一螺杆的端部抵接于所述定位杆。
22.通过采用上述技术方案,第二螺杆和定位柱对杯体有夹持作用,从而对杯体有固定作用;工作人员可以通过旋转第二螺杆来解除对杯体的夹持作用,增加了工作人员安装和拆卸杯体的效率。
23.可选的,所述第二螺杆上固定设置有旋钮。
24.通过采用上述技术方案,工作人员通过旋转旋钮来旋转第二螺杆,具有省力作用,进一步增加了工作人员安装和拆卸杯体的效率。
25.综上所述,本技术包括以下至少一种有益技术效果:需要将食物捣碎时,将食物放置于杯体内部,开启捣碎机,以使驱动装置驱动升降架升降,升降架带动捣碎装置升降,捣碎装置在升降的过程中捣碎杯体内部的食物,从而将食物捣碎;相比于人工手动捣碎食物,不仅提高了捣碎机捣碎食物的效率,同时也减小了工作人员的劳动强度;驱动装置在驱动第一升降件下降时,第一升降件带动第一螺杆下降,第一螺杆带动调节块下降,调节块在下降时向下挤压弹簧的顶端,以使弹簧的底端向下挤压升降块升降,升降块带动捣碎装置升降,捣碎装置在捣碎食物的过程中,弹簧对升降块有缓冲作用,从而对捣碎装置有缓冲作用,进而对杯体有保护作用;驱动装置驱动第一升降件上升时,第一升降件带动第一螺杆上升,第一螺杆带动调节块上升、同时第一升降件带动第二升降件上升,从而使升降块在竖直方向上实现往复运动;升降块在升降的过程中,由于导向杆与第一升降件滑移配合,同时导向杆与调节块滑移配合,从增加了升降块和捣碎装置升降的稳定性;同时工作人员还可以通过旋转第一螺杆来改变调节块的高度,从而改变调节块到升降块之间的距离,进而改变弹簧的弹力大小;由于偏心杆位于偏心轮的偏心位置,在捣碎食物的过程中,通过电机驱动偏心轮旋转,偏心轮带动偏心杆旋转,偏心杆与驱动槽滑移配合,从而带动第一升降件实现往复升降,第一升降件带动第二升降件往复升降,第二升降件带动捣碎装置往复升降,从而将食物捣碎。
附图说明
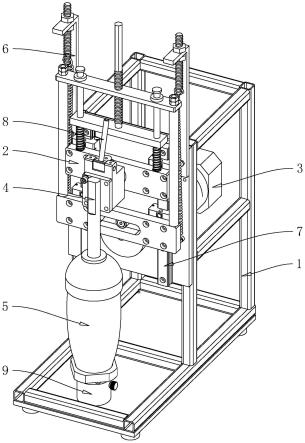
26.图1是本技术实施例中捣碎机的结构示意图。
27.图2是本技术实施例中机架的结构示意图。
28.图3是本技术实施例中升降架的结构示意图。
29.图4是图3中a部分的局部放大图。
30.图5是本技术实施例中捣碎机的半剖视图。
31.图6是图5中b部分的局部放大图。
32.图7是图5中c部分的局部放大图。
33.图8是本技术实施例中壳体的结构示意图。
34.附图标记说明:1、机架;11、底板;12、底框;13、支撑架;14、安装板;15、第一缓冲垫;16、壳体;161、第一通槽;162、第二通槽;163、第三通槽;2、升降架;21、第一升降件;211、驱动块;212、导向块;213、连接杆;214、驱动槽;22、第二升降件;221、升降块;222、导向杆;223、防脱块;224、第二缓冲垫;23、缓冲件;231、第一螺杆;232、调节块;233、弹簧;234、第一握持杆;3、驱动装置;31、电机;32、偏心轮;33、偏心杆;34、第一轴承;4、捣碎装置;41、固定轴;411、插接孔;42、旋转筒;421、环形槽;422、滑移孔;43、捣碎杆;431、定位槽;44、捣碎块;45、连接块;46、第二轴承;47、盖体;48、支撑件;481、支撑块;482、支撑部;5、杯体;6、缓冲装置;61、承载件;611、固定块;612、承载块;613、第三螺杆;614、螺母;615、穿引孔;62、拉簧;7、导向机构;71、导轨;72、第一滑块;721、第一导槽;73、第二滑块;731、第二导槽;8、固定机构;81、滑移件;811、滑移杆;812、插接杆;82、驱动件;821、旋转块;822、第二握持杆;823、旋转轴;824、避位槽;83、联动件;831、联动杆;832、联动块;833、固定孔;9、固定组件;91、定位柱;911、定位孔;92、底座;921、定位杆;922、放置块;923、放置槽;93、紧固件;931、第二螺杆;932、旋钮。
具体实施方式
35.以下结合附图1-8对本技术作进一步详细说明。
36.为了便于理解,在本实施例中的水平方向上,将电机31输出轴的长度方向定义为第一方向,将与电机31的输出轴垂直的方向定义为第二方向,以此为基础对捣碎机进行描述。
37.一种捣碎机,参照图1,捣碎机包括机架1、升降架2、驱动装置3、捣碎装置4和杯体5。升降架2滑移设置于机架1上,驱动装置3设置于机架1上,驱动装置3用于驱动升降架2升降。杯体5固定于机架1上,杯体5用于放置食物,捣碎装置4固定于升降架2上,捣碎装置4用于捣碎食物。在本实施例中,杯体5位于捣碎装置4的正下方。当工作人员需要需要将食物捣碎时,将食物放置于杯体5内部,开启捣碎机,以使驱动装置3驱动升降架2升降,升降架2带动捣碎装置4升降,捣碎装置4在升降的过程中捣碎杯体5内部的食物,从而将食物捣碎;相比于人工手动捣碎食物,不仅提高了工作人员将食物捣碎的效率,同时也减小了工作人员的劳动强度。
38.参照图2,在本实施例中,机架1包括底板11、底框12、支撑架13和安装板14。底板11和底框12均呈水平设置,底框12固定于底板11的上表面。支撑架13沿竖直方向延伸,支撑架13的底端与底框12的上表面固定连接。安装板14固定于支撑架13的侧壁。升降架2滑移设置
于安装板14上。驱动装置3设置于安装板14上,驱动装置3与升降架2分别位于安装板14的两侧。底板11的下表面固定设置有四个第一缓冲垫15,四个第一缓冲垫15呈矩形阵列分布,从而形成对机架1的稳定支撑。在本实施例中,底框12和支撑架13的形状不作具体限定,但凡所设置的底框12和支撑架13满足上述连接关系即可。
39.参照图3,升降架2包括第一升降件21、第二升降件22和缓冲件23。驱动装置3固定于安装板14靠近支撑架13的侧壁,驱动装置3用于驱动第一升降件21升降。第二升降件22与第一升降件21滑移配合,缓冲件23用于连接第一升降件21和第二升降件22,缓冲件23对第二升降件22有缓冲作用,从而对捣碎装置4有缓冲作用,进而对杯体5有保护作用。
40.继续参照图3,具体的,第一升降件21包括驱动块211、导向块212和两个连接杆213。驱动块211和导向块212均沿第二方向延伸,且驱动块211位于导向块212的下方。两个连接杆213均沿竖直方向延伸,两个连接杆213的底端均与驱动块211固定连接,两个连接杆213的顶端均与导向块212固定连接。
41.继续参照图3,承载板靠近第一升降件21的侧壁还设置有导向装置,导向装置包括至少一个导向机构7。在本实施中,导向机构7的数量为两个,两个导向机构7对称分布于安装板14的两侧。
42.继续参照图3,每个导向机构7均包括导轨71和第一滑块72,导轨71沿竖直方向延伸,导轨71固定于安装板14背离支撑架13的侧壁。第一滑块72固定于驱动块211靠近安装板14的侧壁,第一滑块72靠近安装板14的侧壁开设有第一导槽721,第一导槽721沿竖直方向延伸,第一导槽721的两端均呈开口设置。导轨71穿过第一导槽721,第一滑块72与导轨71滑移配合。导轨71对第一滑块72有导向作用,从而对第一升降件21有导向作用,增加了第一升降件21升降的稳定性。
43.参照图2和图3,第二升降件22包括升降块221和至少一个导向杆222,捣碎装置4固定于升降块221背离支撑架13的侧壁。具体的,导向杆222的数量为两个,两个导向杆222均沿竖直方向延伸。两个导向杆222的底端均与升降块221的上表面固定连接,两个导向杆222的顶端均穿过导向块212并与导向块212滑移配合。两个导向杆222的顶端均一体成型有防脱块223,两个导向杆222上均套设有第二缓冲垫224,第二缓冲垫224位于防脱块223与导向块212之间。当防脱块223的下表面抵接于第二缓冲垫224的上表面时,导向块212对第二缓冲垫224和防脱块223有向上的支撑作用,同第二缓冲垫224对防脱块223有缓冲作用。
44.参照图3,导向机构7还包括第二滑块73,第二滑块73固定于升降块221靠近安装板14的侧壁,第二滑块73靠近安装板14的侧壁开设有第二导槽731,第二导槽731沿竖直方向延伸,第二导槽731的两端均呈开口设置。导轨71穿过第二导槽731,第二滑块73与导轨71滑移配合。导轨71对第二滑块73有导向作用,从而对第二升降件22有导向作用,增加了第二升降件22升降的稳定性。
45.继续参照图3,缓冲件23包括第一螺杆231和调节块232,第一螺杆231沿竖直方向延伸。第一螺杆231的顶端穿过导向块212并与导向块212螺纹配合,第一螺杆231的底端穿设于调节块232并调节块232转动连接。两个导向杆222均穿过调节块232并与调节块232滑移配合。两个导向杆222上均套设有弹簧233,弹簧233的顶端抵接于调节块232下表面,弹簧233的底端抵接于升降块221上表面。
46.继续参照图3,驱动装置3在驱动第一升降件21下降时,第一升降件21带动第一螺
杆231下降,第一螺杆231带动调节块232下降,调节块232在下降时向下挤压弹簧233的顶端,以使弹簧233的底端向下挤压升降块221升降,升降块221带动捣碎装置4升降,捣碎装置4在捣碎食物的过程中,弹簧233对升降块221有缓冲作用,从而对捣碎装置4有缓冲作用,进而对杯体5有保护作用。驱动装置3驱动第一升降件21上升时,第一升降件21带动第一螺杆231上升,第一螺杆231带动调节块232上升、同时第一升降件21带动第二升降件22上升,从而使升降块221在竖直方向上实现往复运动。同时当第二滑块73因卡死而不能滑动时,以使第二升降件22不能沿竖直方向滑动;由于第一升降件21与第二升降件22之间通过缓冲件23相连,当驱动装置3驱动第一升降件21升降时,在缓冲件23的缓冲作用下,第一升降件21能实现正常的升降,第一升降件21在升降的过程中依然能够实现对食物捣碎的功能。
47.继续参照图3,同时工作人员还可以通过旋转第一螺杆231来改变调节块232的高度,从而改变调节块232到升降块221之间的距离,进而改变弹簧233的弹力大小。第一螺杆231的顶端一体成型有第一握持杆234,第一握持杆234沿竖直方向延伸,第一握持杆234的水平截面为正六边形。工作人员通过旋转第一握持杆234来旋转第一螺杆231,具有省力作用。
48.参照图2和图3,驱动装置3包括电机31和偏心轮32,电机31固定于安装板14靠近支撑架13的侧壁。电机31的输出轴转过安装板14并与安装板14转动连接,偏心轮32套设于电机31的输出轴上,电机31的输出轴与偏心轮32固定连接,且电机31的输出轴与偏心轮32同轴。偏心轮32上固定设置有偏心杆33,偏心杆33位于偏心轮32的偏心位置,偏心杆33沿第一方向延伸。驱动块211靠近安装板14的侧壁开设有贯穿的驱动槽214,驱动槽214沿第二方向延伸,且驱动槽214的两端均呈封闭设置。偏心杆33穿过所驱动槽214,偏心杆33与驱动槽214滑移配合。由于偏心杆33位于偏心轮32的偏心位置,在捣碎食物的过程中,通过电机31驱动偏心轮32旋转,偏心轮32带动偏心杆33旋转,偏心杆33与驱动槽214滑移配合,从而带动第一升降件21实现往复升降,第一升降件21带动第二升降件22往复升降,第二升降件22带动捣碎装置4往复升降,从而将食物捣碎。
49.参照图3,偏心杆33上套设有第一轴承34,第一轴承34与偏心杆33转动连接,第一轴承34的两侧分别抵接于驱动槽214的两个内侧壁。第一轴承34避免了偏心杆33与驱动块211直接接触,对偏心杆33和驱动块211均有保护作用。
50.参照图3和图4,安装板14背离支撑架13的侧壁设置有缓冲装置6,缓冲装置6包括至少一个缓冲机构。在本实施例中,缓冲机构的数量为两个,两个缓冲机构相互对称。每个缓冲机构均包括承载件61和拉簧62,两个承载件61均固定于安装板14背离支撑架13的侧壁。两个拉簧62的顶端分别套设于两个承载件61上,驱动块211靠近安装块的侧壁螺纹配合有两个螺栓,两个拉簧62的底端分别套设于两个螺栓上。承载件61将拉簧62的顶端与第一升降件21连接在一起,拉簧62的底端套设于第一升降件21上,第一升降件21在升降的过程中,拉簧62对第一升降件21有缓冲作用。
51.继续参照图3和图4,每个承载件61均包括固定块611、承载块612、第三螺杆613和两个螺母614。固定块611通过螺栓固定于安装板14上,固定块611沿竖直方向延伸。承载块612一体成型于固定块611的顶端,承载块612沿第一方向延伸。第三螺杆613穿过承载块612,第三螺杆613与承载块612滑移配合。两个螺母614均套设于第三螺杆613上,其中一个螺母614抵接于承载块612的上表面,另一个螺母614抵接于承载块612的下表面。两个螺母
614对承载块612有夹持作用,从而将第三螺杆613固定于承载块612上。第三螺杆613上开设有贯穿的穿引孔615,穿引孔615沿第二方向延伸,拉簧62的顶端穿过穿引孔615,工作人员便于通过旋转两个螺母614来调节第三螺杆613的高度,从而调节第三螺杆613到螺栓之间的距离,进而调节拉簧62的弹力。
52.参照图5和图6,捣碎装置4包括固定轴41、旋转筒42和捣碎杆43。固定轴41固定于升降块221背离支撑架13的侧壁,旋转筒42套设于固定轴41上并与固定轴41通过两个第二轴承46转动连接。旋转筒42的两端均开设有环形槽421,两个第二轴承46分别与两个环形槽421卡接配合,增加了工作人员安装第二轴承46的便捷性。
53.参照图6,旋转筒42背离支撑架13的侧壁通过螺栓固定有连接块45,捣碎杆43通过螺栓固定于连接块45上,增加了工作人员安装和拆卸捣碎杆43的便捷性。捣碎杆43上开设有定位槽431,连接块45的抵接于定位槽431的内侧壁。定位槽431对连接块45有定位作用,增加了捣碎杆43固定于连接块45上的牢固性。
54.参照图5,捣碎杆43的底端螺纹配合有捣碎块44,捣碎块44增加了捣碎杆43底端与食物之间的接触面积,从而增加了捣碎机对食物的捣碎效率。同时捣碎杆43上还套设有盖体47,盖体47与捣碎杆43滑移配合。当盖体47盖合于杯体5上时,盖体47的内侧壁抵接于杯体5的外侧壁,从而防止杯体5内部的食物和水分外漏。
55.参照图6,捣碎装置4还包括固定机构8,固定机构8用于将旋转筒42固定于固定轴41上。固定机构8包括滑移件81,滑移件81包括一体成型的滑移杆811和插接杆812,在本实施例中,滑移杆811的直径大于插接杆812的直径。旋转筒42上开设有滑移孔422,滑移杆811与滑移孔422滑移配合。固定轴41上开设有插接孔411,插接杆812与插接孔411插接配合。
56.参照图6,固定机构8还包括用于驱动滑移件81滑动的驱动件82。具体的,驱动件82包括旋转块821、第二握持杆822和旋转轴823。旋转筒42上固定设置有支撑件48,支撑件48包括支撑块481和两个支撑部482,支撑块481一体成型于旋转筒42的上表面,两个支撑部482一体成型于支撑块481上。旋转轴823沿第二方向延伸,旋转轴823的两端分别穿设于两个支撑部482,旋转轴823的两端分别与两个支撑部482转动连接。旋转块821套设于旋转轴823上,旋转块821与旋转轴823转动连接。且旋转块821的两侧分别抵接于两个支撑部482的侧壁,两个支撑部482对旋转块821有导向作用,增加了旋转块821旋转的稳定性。第二握持杆822固定于旋转块821上,工作人员通过转动第二握持杆822来转动旋转块821,具有省力作用。
57.继续参照图6,滑移件81上固定设置有联动件83,联动件83包括一体成型的联动杆831和联动块832,联动杆831与滑移件81固定连接。旋转块821上开设有避位槽824,联动杆831位于避位槽824内。旋转块821的上表面抵接于联动块832的下表面,旋转块821的下表面抵接于滑移件81的顶端。
58.继续参照图6,当需要安装杯体5时,朝向远离捣碎机的方向旋转第二握持杆822,第二握持杆822带动旋转块821旋转,由于旋转块821的上表面抵接于联动块832的下表面,旋转块821在旋转的过程中带动联动块832向上运动,联动块832带动联动杆831向上运动,联动杆831带动滑移件81向上运动,从而解除滑移件81对旋转筒42和固定轴41的固定作用。当工作人员放置好杯体5后,通过朝向靠近捣碎机的方向旋转第二握持杆822,第二握持杆822带动旋转块821旋转,由于旋转块821的下表面抵接于滑移件81的顶端,旋转块821在旋
转的过程中带动滑移件81向下运动,以使滑移件81的底端插入插接孔411内部。
59.参照图5和图7,底板11上设置有用于固定杯体5的固定组件9,固定组件9包括定位柱91和底座92。定位柱91的轴线沿竖直方向延伸,定位柱91的底端抵接于底板11的上表面,定位柱91通过螺栓固定于底板11上,定位柱91顶端开设有定位孔911。底座92包括定位杆921和一体成型与定位杆921顶端的放置块922。放置块922的上表面开设有放置槽923,杯体5底端的外侧壁抵接于放置槽923的内侧壁,增加了杯体5放置于放置块922上的稳定性。杯体5通过螺栓固定于放置块922上,定位杆921与定位孔911插接配合。定位柱91上的定位孔911对定位杆921有定位作用,增加了工作人员将底座92放置于机架1上的效率,同时增加了底座92放置于机架1上的稳定性,从而增加了杯体5放置于机架1上的稳定性。
60.参照图8,固定组件9还包括紧固件93,紧固件93包括第二螺杆931,第二螺杆931与定位柱91螺纹配合,第二螺杆931的端部抵接于定位杆921。第二螺杆931和定位柱91对杯体5有夹持作用,从而对杯体5有固定作用;工作人员可以通过旋转第二螺杆931来解除对杯体5的夹持作用,增加了工作人员安装和拆卸杯体5的效率。第二螺杆931上固定设置有旋钮932。工作人员通过旋转旋钮932来旋转第二螺杆931,具有省力作用,进一步增加了工作人员安装和拆卸杯体5的效率。
61.参照图1和图8,机架1上还套设有壳体16,壳体16的底部呈开口设置。其中机架1、升降架2和驱动装置3位于壳体16内部。捣碎装置4和杯体5位于壳体16外部。值得注意的是,壳体16的侧壁开设有第一通槽161,固定轴41穿过第一通槽161,且固定轴41与第一通槽161间隙配合。壳体16的顶部开设有第二通槽162和两个第三通槽163,第一握持杆234穿过第二通槽162,两个承载件61分别穿过两个第三通槽163。同时第一握持杆234与第二通槽162间隙配合,两个承载件61分别与两个第三通槽163间隙配合,从而对整体的捣碎机有保护作用。
62.本技术的捣碎机的实施原理为:当工作人员需要需要将食物捣碎时,将食物放置于杯体5内部,开启捣碎机,以使驱动装置3驱动升降架2升降,升降架2带动捣碎装置4升降,捣碎装置4在升降的过程中捣碎杯体5内部的食物,从而将食物捣碎;相比于人工手动捣碎食物,不仅提高了捣碎机捣碎食物效率,同时也减小了工作人员的劳动强度。
63.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1