一种四角打胶机的制作方法
1.本实用新型涉及打胶机技术领域,具体为一种四角打胶机。
背景技术:
2.打胶机是专门对胶粘剂等涂料进行控制并点滴、涂覆于产品表面的自动化设备,例如在太阳能板生产过程中,往往需要使用到打胶机对其进行大脚,但现有的打胶机,其在打胶使用时不够灵活,大多只能单独对太阳能板的一个区域进行打胶,难以对太阳能板四角区域进行同时打胶,因此当使用者需要对太阳能板的其他区域进行打胶时,往往需要使用者手动搬运太阳能板,使其位置调换,从而极大的增加了使用者的工作强度,并影响了打胶机的工作效率和使用效果,造成其打胶精度差。
技术实现要素:
3.本实用新型的目的在于提供一种四角打胶机,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型采用的技术方案如下:
5.一种四角打胶机,包括由呈矩形的支撑板和分别设于支撑板底部四周的支架组成的支架,所述支撑板的顶部四周设有四组三坐标涂胶机械手,四组所述三坐标涂胶机械手结构相同,任一所述三坐标涂胶机械手包括沿支撑板长度方向布设的x轴移动机构,位于x轴移动机构上方、沿支撑板宽度方向布设、底部通过第一滑块与x轴移动机构滑动连接的y轴移动机构,竖直向上设于y轴移动机构侧面、背部通过第二滑块与y轴移动机构滑动连接的z轴移动机构,所述z轴移动机构、y轴移动机构和x轴移动机构滑动方向相互垂直,所述z轴移动机构的表面滑动连接有气动涂胶阀。
6.进一步地,所述支撑板的上方设有太阳能板,所述太阳能板的底部与安装在支撑板顶部的传送辊相接触,所述支撑板顶部沿太阳能板的宽度中心线对称设有四组气动导向气缸。
7.进一步地,所述x轴移动机构、y轴移动机构和z轴移动机构均为高精度直线模组,且所述x轴移动机构、y轴移动机构的长度均为500mm,所述z轴移动机构的长度为100mm。
8.进一步地,所述支撑板的底部设有电控箱。
9.进一步地,所述支架采用碳钢型材制成,所述支撑板四周边缘可拆卸设有防护网。
10.与现有技术相比,本实用新型具有以下有益效果:
11.(1)在本实用新型中,巧妙地在支撑板的顶部四周设有四组结构相同的三坐标涂胶机械手,而任一三坐标涂胶机械手包括x轴移动机构、y轴移动机构和 z轴移动机构,且z轴移动机构表面滑动连接有气动涂胶阀,因此当使用者在使用该种打胶机对太阳能板进行打胶时,四组三坐标涂胶机械手可同时对太阳能板的四角区域进行平面和立体涂胶,以此大大降低了使用者的劳动强度,同时四组三坐标涂胶机械手,彼此可以单独运行,也可以多组共同运行涂胶,涂胶图形多样,控制精准可靠,组合方便灵活,从而使打胶机工作更加灵
活,且该打胶机可与生产线匹配安装,以实现流水线涂胶,以此大大提高打胶机的工作效率,并使打胶机使用效果更好。
12.(2)在本实用新型中,x轴移动机构、y轴移动机构和z轴移动机构均为高精度直线模组,以此该打胶机在打胶时,其打胶精度更高,打胶涂覆更加均匀,从而使大大改善其涂胶效果。
13.综上所述,本实用新型具有涂胶组合方便灵活、涂胶工作效率高、涂胶均匀效果好、涂胶精度高等等优点,在打胶机技术领域具有很高的实用价值和推广价值。
附图说明
14.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需使用的附图作简单介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对保护范围的限定,对于本领域技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
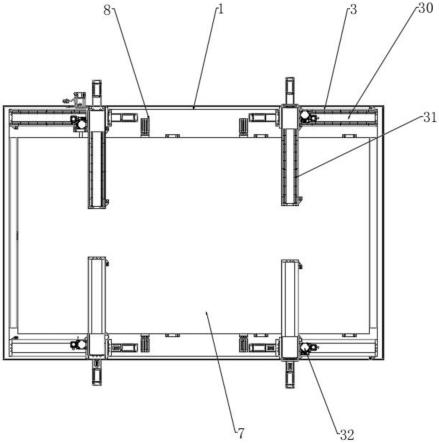
15.图1为本实用新型结构示意图。
16.图2为本实用新型支撑板俯视结构示意图(去防护网)。
17.图3为本实用新型三坐标涂胶机械手结构示意图。
18.上述附图中,附图标记对应的部件名称如下:
19.1、支撑板;2、支架;3、三坐标涂胶机械手;30、x轴移动机构;31、y 轴移动机构;32、z轴移动机构;4、第一滑块;5、第二滑块;6、气动涂胶阀; 7、太阳能板;8、气动导向气缸。
具体实施方式
20.为使本技术的目的、技术方案和优点更为清楚,下面结合附图和实施例对本实用新型作进一步说明,本实用新型的实施方式包括但不限于下列实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。
21.实施例
22.如图1至图3所示,本实施例提供一种四角打胶机,包括由呈矩形的支撑板1和分别设于支撑板底部四周的支架2组成的支架。首先需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
23.本实施例中,支撑板1的顶部四周设有四组三坐标涂胶机械手3,四组三坐标涂胶机械手3结构相同,任一三坐标涂胶机械手3包括沿支撑板1长度方向布设的x轴移动机构30,位于x轴移动机构30上方、沿支撑板1宽度方向布设、底部通过第一滑块4与x轴移动机构30滑动连接的y轴移动机构31,竖直向上设于y轴移动机构31侧面、背部通过第二滑块5与y轴移动机构31滑动连接的z轴移动机构32,z轴移动机构32、y轴移动机构31和x轴移动机构30滑动方向相互垂直,z轴移动机构32的表面滑动连接有气动涂胶阀6,通过x轴移动机构30、y轴移动机构31和z轴移动机构32的配合工作,可驱动气动涂胶阀6在三维立体区域内进行移动,从而使气动涂胶阀6可实现平面和立体涂胶,以使其涂胶更加灵活。
24.具体的,支撑板1的上方设有太阳能板7,太阳能板的底部与安装在支撑板 1顶部的传送辊相接触,支撑板1顶部沿太阳能板的宽度中心线对称设有四组气动导向气缸8,气动导向气缸8可对太阳能板进行定位,以使打胶机涂胶时位置更加精准,x轴移动机构30、y轴移动机构31和z轴移动机构32均为高精度直线模组,且x轴移动机构30、y轴移动机构31的长度均为500mm,z轴移动机构32的长度为100mm,通过x轴移动机构30、y轴移动机构31和z轴移动机构 32的共同工作,可带动气动涂胶阀6在三维立体区域内进行移动,以实现实现平面和立体涂胶,并可涂l形等预设图形,支撑板1的底部设有电控箱,支架2 采用碳钢型材制成,支撑板1四周边缘可拆卸设有防护网,碳钢型材可显著提高打胶机的结构强度,以使打胶机刚度更好,耐冲击,防护网的设置,可使打胶机在进行打胶工作时,对支撑板1四周进行防护,以使打胶机工作时安全性更好。
25.下面简要说明本实用新型工作原理:
26.首先,当太阳能板7移动至支撑板1上的传送辊上时,气动导向气缸8可开始工作,并对太阳能板7进行定位,当太阳能板7定位好后,使用者可通过电控箱操作三坐标涂胶机械手3进行工作,从而使x轴移动机构30、y轴移动机构31和z轴移动机构32沿各自移动方向进行移动,从而在其共同移动下,驱动气动涂胶阀6在三维立体区域内进行移动,以使气动涂胶阀6实现在太阳能板7上进行平面和立体涂胶(可在500mm
×
500mm
×
100mm范围内进行精准打胶),并可按预设图形(l形)进行涂胶,同时该打胶机配备的四组三坐标涂胶机械手3,彼此可以单独运行,也可以多组同时涂胶(4组、3组、2组),从而使其打胶组合方便灵活,以使打胶机工作效率更高,且该打胶机可与生产线匹配安装,以实现流水线自动涂胶,从而大大提高打胶机的工作效率,并使打胶机使用效果更好。
27.上述实施例仅为本实用新型的优选实施例,并非对本实用新型保护范围的限制,但凡采用本实用新型的设计原理,以及在此基础上进行非创造性劳动而作出的变化,均应属于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1