自动涂胶机的制作方法
1.本实用新型发明涉及工业加工木门流水线生产设备,具体来说,涉及木门用自动涂胶机。
背景技术:
2.木门产业是我国传统产业之一,涂胶作业在木门生产中具有十分重要的地位,而国内这类家具企业大部分还是采用手工喷涂的方法喷漆作业、设备简陋、操作不够规范。同时涂胶工序在生产中其加工质量和效率直接影响到木门等产品的质量和生产率,因此涂胶工艺和设备优化在产品质量表现上具有十分重要的意义。通过自动涂胶试验装置设计与喷涂工艺优化研究,将大幅减少操作工人的数量、节省胶水的用量、提高涂饰表面的质量稳定性、提升产品的生产效率。
3.申请号为202022462852.6的中国专利,公开了一种木门制造用涂胶装置,其包括:侧板;侧板一侧上端贯穿连接有第一连接杆,侧板下表面固定连接有侧连接杆,第一连接杆外侧贯穿连接有连接板,且连接板设置有两个,连接杆另一端贯穿连接有连接板,连接板一侧固定连接有外箱,通过设置涂胶器和出胶口,将木门放置在涂胶板上,使用固定扣固定牢固后,打开侧板一侧的开关和出胶口,直线电机开始工作,电动滑轨外侧的涂胶器开始在电动滑轨上滑动,在滑动过程中涂胶器内部的胶体会从出胶口涂抹在木板上。
4.上述专利存在只能完成单方向上的涂胶,涂胶设备无法与被涂胶的工件木门做很好的结合继而精度较低、效率低等问题。
5.故而提出一种能把机器自动涂胶与物料自动进出、流转等辅助工作结合起来的自动涂胶机来解决上述问题。
技术实现要素:
6.本实用新型的目的是提供自动化程度较高、胶头可以进行复杂走位、生产效率高的自动涂胶机。
7.本实用新型自动涂胶机,包括:木门运送装置,木门定位夹紧装置,胶头运动装置和涂胶装置;所述木门运送装置包括一条传送带;所述木门定位夹紧装置包括横向定位及夹紧装置部分与前进方向定位装置部分,所述横向定位及夹紧装置部分包括由电机驱动的一对夹头,所述的前进方向定位装置部分包括一个道闸及可使所述道闸处于抬起或放下状态的四杆机构;所述胶头运动装置包括一沿纵向移动的顶部横梁及可相对所述顶部横梁横向移动的滑块;所述涂胶装置包括一个胶头,所属胶头设于所述滑块之上。
8.由于采上述结构,木门涂胶或涂漆时,通过木门运送装置和木门定位夹紧装置,工件可自动传送并准确定位;同时,通过可沿纵、横多向移动的胶头运动装置,胶头随滑块可实现三维空间内的复杂运动,可以实现如“回”字型、“s”型涂胶,生产效率大幅提高。
附图说明
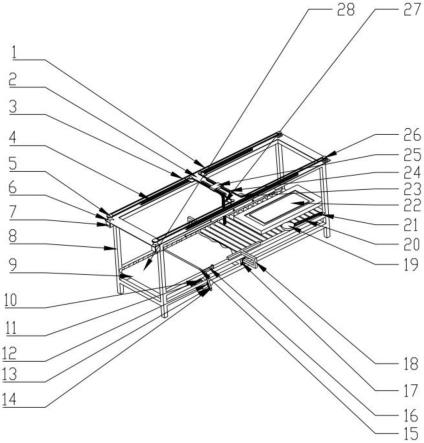
9.图1是本实用新型自动涂胶机的整体结构的示意图。
10.图中,1-同步带;2-顶部横梁;3-a滑块;4-滑轨;5-a带轮;6-顶板;7
‑ꢀ
电机;8-整体框架;9-滚轮;10-步进电机;11-传动轴;12-轴承;13-曲柄;14
‑ꢀ
连杆;15-道闸;16-摆杆;17-横向限位装置固定;18-横向限位装置;19-辅助定位轮;20-v带;21-小带轮;22-门;23-滑轮;24-滑轨;25-b滑块;26-b带轮; 27-滚珠丝杠;28-传送带。
11.图2是本实用新型自动涂胶机的横向定位装置的示意图。
12.图中,30-左夹头31-定位装置;32-齿轮;33-步进电机;34-右夹头;35-支撑横梁。
13.图3是本实用新型自动涂胶机的辅助定位结构的示意图。
14.图中,19-辅助定位轮;341-大带轮;35-轴承;20-v带;21-小带轮;36-电机。
15.图4是本实用新型自动涂胶机的四杆结构示意图。
16.图中,37-支撑;38-辅助杆;8-整体框架;9-滚轮;39-电机;40-传动轴; 41-底座;42-曲柄;43-连杆;44-摆杆;45-道闸。
17.图5是本实用新型自动涂胶机的胶头部分结构图。
具体实施方式
18.本实用新型自动涂胶机,整体构成如图1所示,主要包括立方形的整体框架,木门运送装置,木门定位夹紧装置,胶头运动装置和涂胶装置。
19.木门运送装置,布置于整体框架8的底部,包括从前之后平列排开的多个滚轮9、传送带28、电机(未图示)。电机以螺栓固定在整体框架8的外侧,首尾的两个直径略大的滚轮9由电机驱动,传送带28附于滚轮9之上,用于传动。传送带28使由上一道工序进入的门可以顺利进入涂胶,即从机器外进入,通过机器,再传出机器。
20.木门定位夹紧装置分为横向定位及夹紧装置与前进方向定位装置。
21.横向定位及夹紧装置,由于木门过长,横向定位及夹紧装置分为精确定位装置以及辅助定位装置。
22.其中,横向定位及夹紧装置如图2所示,主要由左夹头30、定位装置31、齿轮32、步进电机33、右夹头34、支撑横梁35组成。支撑横梁35宽为300mm 其中心点距离机器框架8边缘2600mm处,步进电机33固定在横梁35上其轴线距离左侧1020mm处固定,定位装置31安装在支撑横梁35上为横向夹紧装置提供定位,左夹头30、右夹头34安装在定位装置31上,贴合框架8两侧对称布置安装。齿轮32与两夹头30、34末端的齿条结构啮合安装,电机33驱动齿轮32使左、右两夹头30、34可以直线运动。电机33驱使齿轮32传动,保证两侧同时夹紧并且可以精确传动,提高效率并且提高定位精度。
23.辅助定位装置如图3所示,由辅助定位轮19、v带20、小带轮21、大带轮 341、轴承35、电机36组成。辅助定位装置由相同的两套带轮组合组成。在门的前进方向上置于左侧的辅助定位轮19逆时针旋转,置于右侧的辅助定位轮19 则要顺时针旋转,两侧的辅助定位轮装置为轴对称关系。位于左侧的大带轮341 固定于相距门入口型材1200mm处,大带轮341以轴承35与框架8伸出轴配合定位并固定,大带轮341上方同轴固定辅助定位轮19,保证大带轮341与辅助定位轮19为同轴关系,转动时由于轴承35则不会对焊接到框架8上的支撑轴产生影响。小带轮21由电机36直接驱动,电机转速为每分钟180转,固定于其轴线距离框架8外
侧220mm处,小带轮21与大带轮341处于同一平面上。传动顺序为电机36驱动v带带动大带轮进而带动辅助定位轮19转动。
24.辅助定位装置的作用为防止门相对于前进方向产生较大的角度,而精确定位装置则要保证门达到预设零点位置。该组合定位装置可以保证以框架为最大宽度的最大偏角门顺利加紧并固定。
25.前进方向定位装置,如图4所示,包括支撑件37、辅助杆38、滚轮9、电机39、传动轴40、底座41、曲柄42、连杆43、摆杆44、道闸45,连杆43与道闸45相接固定,设计四杆机构中的摆杆44摆角为90度并且四杆机构运动过程中的极位夹角为10度,由机构倒置法反求出四杆机构,道闸45横于框架8 两侧保证可以限制门的前进方向,图中所示为摆杆44的初始位置并且为门前进方向上的死点位置。摆杆44上转至竖直位置时,道闸45抬起至高位。传动轴40与曲柄42相接,电机39驱动传动轴40进而驱动曲柄42转动,控制四杆机构的运动实现道闸45的抬起与放下的运动。工作过程为检测到木门被送料方向定位后启动电机横向夹紧并定位木门,进行涂胶,待涂胶结束后曲柄转动使横杆上升令木门通过。设计的四杆机构具有急回特性可以提升整体结构的效率。
26.胶头运动装置包括同步带1、顶部横梁2、a滑块3、滑轨4、a带轮5、电机7、滑轨24、b滑块25、b带轮26。顶板26焊接或者用螺柱安装在8框架上固定。两个a带轮5与两个b带轮3以螺栓安装在顶板6四个角上,在一侧安装两个电机7,长滑轨4安装在顶板26两侧对称安装。将两个滑块3分别安装在两长滑轨4上,保证横向位置一定,再将横梁6安装在两个滑块上3,两个滑块支撑起横梁。横梁上短滑轨24安装在两侧,b滑块25安装在滑轨24上。b 滑块25上的延伸处预留有螺孔借此安装丝杆电机。考虑到涂胶机装置需要远距离移动,故采用传动带传动,皮带1以hbot结构中绕法安装在四个带轮5,26 及横梁上预留光轴的四个轴承上,hbot结构可以解决远距离带传动传动不精确的问题。电机7拉动皮带1移动,控制滑块25移动进而控制胶头移动。
27.涂胶装置包括滚珠丝杠电机30、滚珠丝杠27、滑块32、胶头33。滚珠丝杠电机30用螺栓固定在b滑块25上,滚珠丝杠27与滚珠丝杠电机30配合安装,滑块32固定在滚珠丝杠31的螺母上,胶头33安装在滑块32上,在电机 30的驱动下,滚珠丝杠31控制滑块32上下运动,实现胶头的上下移动完成涂胶动作。
28.本实用新型自动涂胶机的具体工作流程为:木门在底部传动带的传动下前进,在辅助定位轮的修正过后继续前进,道闸初始状态处于放下的位置,限制门的前进。待门撞到道闸之后,程序控制横向夹紧装置夹紧门并且定位门于初始位置,此后涂胶机构启动,在同步带的传动下胶头移动至初始位置开始由规定路线进行涂胶。涂胶完成后,胶头升至初始位置,电机控制曲柄打开道闸使门顺利通过。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1