一种药盒自动识别分拣装置及其工作方法
1.本发明属于医药设备领域,具体涉及一种药盒自动识别分拣装置及其工作方法。
背景技术:
2.目前医院药房和医药商店的药品分拣方式主要是拆零人工分拣,主要以人工扫码录入药盒分拣为主。这种挑选方式不仅效率低,而且劳动强度大,容易出错,无法满足现代化社会高效率、高标准的要求,伴随着我国综合国力的提高,发展社会保障事业、促进医疗机构信息化是未来的趋势,对药品自动分拣技术的需求也日渐迫切。为此提出一种药盒自动识别分拣装置,该系统可以实现随机摆放的药盒自动整齐排列,进一步实现自动扫码识别,与传统的人工操作相比,在有效提高生产制造效率的同时,可极大降低人力资源的利用。
技术实现要素:
3.本发明目的在于提供一种药盒自动识别分拣装置及其工作方法。
4.本发明一种药盒自动识别分拣装置,包括机架,以及安装在机架上且依次排列的传送推料装置、抓取校正装置和推送识别装置。所述的传送推料装置包括第一输送机和逐层推料组件;逐层推料组件设置在第一输送机输出端的下方。所述的逐层推料组件包括存储料仓、推板和第一气缸。存储料仓设置在第一输送机的输出端下方。第一输送机输出的药盒掉落到存储料仓中。存储料仓的内腔底面倾斜设置。倾斜滑动的推板设置在存储料仓的内腔底部,并由第一气缸驱动。推板的顶面到存储料仓的内腔底面的距离小于药盒厚度的最小值。
5.所述的抓取校正装置包括第二输送机、第一固定板、第二固定板、机械臂组件和推送输出组件。第二输送机的输入端位于存储料仓的出口处。所述的推送输出组件包括第一双杆气缸、v型槽板和第二气缸。v型槽板的输入端靠近第二输送机的输出端。v型槽板上设置有v型槽和位于v型槽一侧的药盒放置板。机械臂组件能够将第二输送机上的药盒逐个抓取到药盒放置板上。第一双杆气缸固定在机架上。第一双杆气缸的推拉方向平行于v型槽的宽度方向。第一双杆气缸的推出杆上固定有第一推送条。第一推送条靠近药盒放置板的顶面,能够将药盒放置板上的药盒推送到v型槽中。第二气缸固定在机架上,且位于v型槽板的输入端。第二气缸的推出杆端部固定有推块。推块与v型槽对齐,用于将v型槽中的药盒推向推送识别装置。
6.所述的推送识别装置包括水平推送组件和图像采集组件。所述的水平推送组件包括第二双杆气缸、转轴、轴支座底板、梳齿板和第二推送条。两根转轴均支承在机架上,且分别位于v型槽板输出端的两侧。两块梳齿板的内侧与两根转轴分别固定。两块梳齿板的外侧均设置有多根依次间隔排列的梳齿条。两块梳齿板上的梳齿条交错排布在一起,形成一个v形支撑面;两块梳齿板能够在动力元件的驱动下同步反向翻转,以调节v形支撑面上两斜面的倾斜程度。初始状态下,v形支撑面与v型槽板上的v型槽对齐。第二双杆气缸安装在其中
一根转轴的外侧,通过第二推送条将梳齿板上的药盒推送到图像采集组件中进行图像采集。
7.作为优选,所述的存储料仓包括侧板、端板和倾斜支撑板。倾斜支撑板固定在机架上,且位于第一输送机输出端的下方。两块侧板分别固定在倾斜支撑板顶面的两侧;端板固定在倾斜支撑板顶面的底端。斜支撑板、端板和两块侧板形成存储料仓。端板与倾斜支撑板之间设置有让位间隙。推板的两侧与开设在两块侧板内侧面上的导向槽分别滑动连接。推板靠近倾斜支撑板,且沿着倾斜支撑板的长度方向滑动。倾斜支撑板的中部开设有沿自身长度方向设置的滑槽。倾斜设置的第一气缸固定在机架上,且活塞杆位于滑槽的正下方。第一气缸的活塞杆端部与推板的底面通过连接块固定。连接块穿过滑槽。
8.作为优选,所述的机械臂组件包括机械臂支架、伺服电机、电机支架、法兰盘、连接细杆、摇臂、舵机安装板、舵机、气阀连接器和真空吸盘。所述的机械臂支架固定在机架上。第一固定板固定在机械臂支架的顶部。第一固定板的底面安装有摄像模块。第二固定板与第一固定板的底部固定。第一固定板和第二固定板上均开设有用于穿线的中心孔。正三角形的三个电机支架均固定在第二固定板的底面。三个电机支架上均固定有伺服电机。三个伺服电机的输出轴均安装有法兰盘;三根摇臂的内端与三个法兰盘分别固定。三根摇臂的外端与三根连接细杆的一端分别转动连接;三根连接细杆的另一端与舵机安装板的三个不同位置分别转动连接。舵机安装板的中心位置安装有舵机。气阀连接器固定在舵机的输出轴上。真空吸盘安装在气阀连接器的底部。真空吸盘的抽气口通过气阀连接器与外部的真空源连接。
9.作为优选,所述第一输送机的输出端设置有第一光电传感器。第二输送机的输出端设置有第二光电传感器。
10.作为优选,所述的第一输送机和第二输送机均采用带式输送机,且输送面水平设置。
11.作为优选,所述的药盒放置板上设置有药盒感应器。药盒感应器采用光电传感器、压力传感器或限位开关。
12.作为优选,所述的水平推送组件还包括第三双杆气缸。所述的第三双杆气缸固定在机架上,且位于两块梳齿板的下方。第三双杆气缸的推出杆朝上设置且固定有上顶块。上顶块呈长条形,与两块梳齿板底面的连接处接触。
13.作为优选,所述的图像采集组件包括第一安装板、识别板、第二安装板、第一相机模块和第二相机模块。第一安装板、识别板和第二安装板均固定在机架上。识别板为透明材料;识别板位于梳齿板远离抓取校正装置的一侧,且与翻转至水平状态的梳齿板平齐。第一安装板、第二安装板分别位于识别板的上方、下方。第一相机模块安装在第一安装板上,且朝下设置,用于拍摄识别板上的药盒的顶面;第二相机模块安装在第二安装板上,且朝上设置,用于拍摄识别板上的药盒的底面。
14.该药盒自动识别分拣装置的工作方法具体如下:
15.步骤一、将多个药盒进入第一输送机;第一输送机将一个或多个药盒掉落到存储料仓中;第一气缸往复运动,将存储料仓中的药盒逐层推送至上第二输送机。
16.步骤二、第二输送机向前输送药盒;机械臂组件通过真空吸盘将第二输送机上的药盒逐个抓取到药盒放置板上。
17.步骤三、每当一个药盒被放置到药盒放置板上时,第一双杆气缸将药盒推送到v型槽板的v型槽中;之后,第二气缸将v型槽中的药盒推送到两块梳齿板上。两块梳齿板向上翻转至水平状态;第三双杆气缸将两块梳齿板上水平的药盒推送到图像采集组件中,图像采集组件识别药盒的商品码,并将药盒信息录入系统。
18.本发明具有的有益效果是:
19.本发明通过v型槽对药盒进行定位,再利用两块翻转的梳齿板配合将倾斜的药盒调整至水平状态,从而使得药盒能够逐个以相同的整齐姿态进入到图像采集组件;提高了图像采集的准确性,并便于药盒后续的入库操作。此外,本发明通过倾斜的推板实现药盒的逐层分离,解决了堆叠在一起的药盒难以抓取的问题。
附图说明
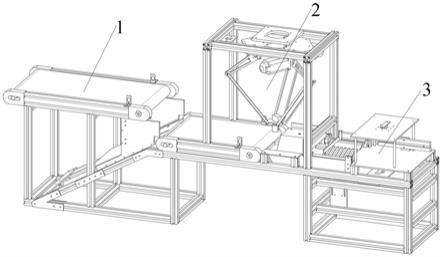
20.图1为本发明的整体结构示意图。
21.图2为本发明中传送堆料装置的第一张结构示意图。
22.图3为本发明中传送堆料装置的第二张结构示意图。
23.图4为本发明中抓取校正装置的结构示意图。
24.图5为本发明中推送识别装置的结构示意图。
具体实施方式
25.以下结合附图对本发明作进一步说明。
26.如图1所示,一种药盒自动识别分拣装置,包括机架,以及安装在机架上且依次排列的传送推料装置1、抓取校正装置2和推送识别装置3。传送推料装置1用于将堆叠在一起的药盒逐层分离后,输送到抓取校正装置2;抓取校正装置2用于将药盒摆正定位后逐个输送到推送识别装置3;推送识别装置3用于药盒推送到指定位置后进行拍摄。
27.如图2和3所示,传送推料装置1包括第一输送机、第一光电传感器12和逐层推料组件;第一输送机的输送面水平设置。逐层推料组件设置在第一输送机输出端的下方。第一输送机的输出端设置有对射式的第一光电传感器12。第一光电传感器12用于检测是否有药盒输出第一输送机。
28.逐层推料组件包括侧板13、端板、倾斜支撑板、推板16和第一气缸14。倾斜支撑板固定在机架上。倾斜支撑板的顶端位于第一输送机输出端的下方靠近抓取校正装置2的一侧。两块侧板13分别固定在倾斜支撑板顶面的两侧;端板固定在倾斜支撑板顶面的底端。倾斜支撑板、端板和两块侧板13形成用于暂时存放药盒的存储料仓。第一输送机输出的药盒将掉落到底面倾斜的存储料仓中。
29.端板与倾斜支撑板之间设置有让位间隙。推板16的两侧与开设在两块侧板13内侧面上的导向槽分别滑动连接。推板16靠近倾斜支撑板,且沿着倾斜支撑板的长度方向滑动。倾斜支撑板的中部开设有沿自身长度方向设置的滑槽。倾斜设置的第一气缸14固定在机架上,且活塞杆位于滑槽的正下方。第一气缸14的活塞杆端部与推板16的底面通过连接块15固定。连接块穿过滑槽。第一气缸14能够推动推板16往复滑动。推板16的顶面到倾斜支撑板顶面的距离小于被整理的各类药盒厚度的最小值。通过推板16的往复滑动,能够将存储料仓中堆叠在一起的药盒逐层推出到抓取校正装置2中,使得进入抓取校正装置2不会存在层
叠的情况。
30.如图4所示,抓取校正装置2包括机械臂支架、第二输送机21、第二光电传感器22、第一固定板23、第二固定板24、摄像模块25、机械臂组件和推送输出组件。第二输送机的输送面水平设置。第一输送机11和第二输送机21均采用带式输送机。第二输送机21的输出端设置有对射式的第二光电传感器22。第二光电传感器22用于检测是否有药盒移动到第二输送机靠近机械臂组件的位置。
31.机械臂组件包括伺服电机26、电机支架27、法兰盘28、连接细杆210、摇臂29、舵机安装板212、舵机211、气阀连接器213和真空吸盘。第二输送机21的输入端位于存储料仓的出口处,并与倾斜支撑板的顶部边缘对齐。机械臂支架固定在机架上。第一固定板23固定在机械臂支架的顶部。摄像模块25安装在第一固定板23的底面。第二固定板24与第一固定板23的底部通过长螺栓连接。第一固定板23和第二固定板24上均开设有用于穿线的中心孔。正三角形的三个电机支架27均固定在第二固定板24的底面。三个电机支架27上均固定有伺服电机26。三个伺服电机26的输出轴均安装有法兰盘28;三根摇臂29的内端与三个法兰盘28分别固定。三根摇臂29的外端与三根连接细杆210的一端分别转动连接;三根连接细杆210的另一端与舵机安装板212的三个不同位置分别转动连接。连接细杆210的两端均设置有关节轴承。舵机安装板212的中心位置安装有舵机211。气阀连接器213固定在舵机211的输出轴上。真空吸盘安装在气阀连接器213的底部。真空吸盘的抽气口通过气阀连接器213与外部的真空源连接。真空吸盘在舵机211和三个伺服电机的驱动下能够进行绕竖直轴线旋转和三自由度移动。
32.推送输出组件包括第一双杆气缸215、v型槽板217和第二气缸218。v型槽板217的输入端靠近第二输送机21的输出端。v型槽板217由一体成型的两块水平板和两块斜板组成。两块斜板的底部边缘连接在一起,形成v型槽。两块水平板的相邻侧边缘与两块斜板两顶部边缘分别连接。其中一块水平板作为药盒放置板。机械臂组件能够将第二输送机21上的药盒逐个抓取到药盒放置板上。药盒放置板上设置有药盒感应器。药盒感应器采用光电传感器、压力传感器或限位开关。
33.第一双杆气缸215固定在机架上,且位于机械臂支架上。第一双杆气缸215的推拉方向平行于v型槽的宽度方向。第一双杆气缸215的推出杆上固定有第一推送条216。第一推送条216的水平段平行于v型槽的宽度方向,且靠近药盒放置板的顶面,能够将水平板上的药盒推送到v型槽中。进入v型槽中的药盒呈现斜放状态。第二气缸218固定在机架上,且位于v型槽板217的输入端。第二气缸218的推出杆端部固定有推块。推块与v型槽对齐,用于将v型槽中的药盒推向推送识别装置3。
34.如图5所示,推送识别装置3包括水平推送组件和图像采集组件。水平推送组件包括第二双杆气缸32、转轴35、轴支座底板、梳齿板37、第三双杆气缸39和第二推送条36。两根转轴35均支承在机架上,且分别位于v型槽板217输出端的两侧。两块梳齿板37的内侧与两根转轴35分别固定。两块梳齿板37的外侧均设置有多根依次等间距排列的梳齿条。两块梳齿板37上的梳齿条交错排布在一起,形成一个v形支撑面;通过两块梳齿板37的翻转,能够调节v形支撑面上两斜面的倾斜程度。初始状态下,v形支撑面与v型槽板217上的v型槽对齐。第二气缸218能够将v型槽板217上的药盒推送到两块梳齿板37上。第三双杆气缸39固定在机架上,且位于两块梳齿板37的下方。第三双杆气缸39的推出杆朝上设置且固定有上顶
块。上顶块呈长条形,与两块梳齿板37底面的连接处接触。通过第三双杆气缸39的伸缩,上顶块能够推动同步翻转,从而调节v形支撑面上两斜面的倾斜程度。将v形支撑面上倾斜的药盒调整为水平状态。
35.第二双杆气缸32固定在机架上,且推拉方向平行于转轴35的轴线方向。第二双杆气缸32的推出杆上固定有第二推送条36。第二推送条36的水平段水平设置,且靠近转轴35的顶部。第二推送条36位于两块梳齿板37的正上方,在两块梳齿板37翻转至水平状态时,第二推送条36能够将两块梳齿板上的药盒从梳齿板推送到图像采集组件的识别板33上。
36.图像采集组件包括第一安装板31、识别板33、第二安装板34、第一相机模块和第二相机模块。第一安装板31、识别板33和第二安装板34均固定在机架上。识别板33为透明材料;识别板33位于梳齿板远离抓取校正装置2的一侧,且与翻转至水平状态的梳齿板平齐。第一安装板31、第二安装板34分别位于识别板33的上方、下方。第一相机模块安装在第一安装板31上,且朝下设置,用于拍摄识别板33上的药盒的顶面;第二相机模块安装在第二安装板34上,且朝上设置,用于拍摄识别板33上的药盒的底面。
37.在第一相机模块和第二相机模块拍摄完毕后,使用后续的下料设备将识别板33上的药盒取出。识别板33上的药盒经过前置的摆放和定位,处于十分端正的姿态,故后续的下料和存放均十分便于实现自动化。
38.该药盒自动识别分拣装置的工作方法具体如下:
39.步骤一、将多个药盒进入第一输送机11后,第一光电传感器12检测到药盒时,第一输送机11停顿后继续输送,直到一个或多个药盒掉落到存储料仓中;之后第一输送机11停止运动,第一气缸14往复运动,将存储料仓中的药盒逐层推送至上第二输送机21。存储料仓清空后,第一输送机11继续输送,持续将堆叠散乱的药盒分离并送上第二输送机21。
40.步骤二、第二输送机21向前输送药盒,当第二光电传感器22检测到药盒后,第二输送机21输送,摄像模块25识别出药盒所在的位置,机械臂组件通过真空吸盘214将药盒逐个抓取到药盒放置板上;
41.步骤三、每当一个药盒被放置到药盒放置板上时,第一双杆气缸215均往复运动一次,通过第一推送条将药盒推送到v型槽板217的v型槽中;之后,第二气缸218往复运动一次,将v型槽中的药盒推送到两块梳齿板37上。
42.第二双杆气缸32向上推出,带动两块梳齿板37向上翻转至水平状态;第三双杆气缸39往复运动一次,将两块梳齿板37上水平的药盒推送到识别板33上;第一相机模块和第二相机模块拍摄药盒的顶面和底面,识别出药盒的商品码,并将药盒信息录入系统。之后第二双杆气缸32向下复位;后续的下料入库和设备自动将识别板33上的药盒抓取入库。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1