一种自动化机械加工零件自动加工分拣设备及其方法与流程
1.本发明涉及机械加工技术领域,具体为一种自动化机械加工零件自动加工分拣设备及其方法。
背景技术:
2.机械加工是指通过一种机械设备对工件的外形尺寸或性能进行改变的过程,按加工方式上的差别可分为切削加工和压力加工,而零件是用来装配成机器的单个制件,目前,零件在进行机械加工后,一般需要对零件进行分拣,从而将符合标准的零件和不符合标准的零件进行分开。
3.现有的分拣方式一般是通过人工对每个零件进行判断,从而完成分拣,这样不仅会降低效率,还会提高劳动强度,为此,我们提出一种自动化机械加工零件自动加工分拣设备及其方法。
技术实现要素:
4.鉴于上述和/或现有一种自动化机械加工零件自动加工分拣设备及其方法中存在的问题,提出了本发明。
5.因此,本发明的目的是提供一种自动化机械加工零件自动加工分拣设备及其方法,能够解决上述提出的问题。
6.为解决上述技术问题,根据本发明的一个方面,本发明提供了如下技术方案:
7.一种自动化机械加工零件自动加工分拣设备,其包括自动化分拣设备,所述自动化分拣设备是由输送结构、检测结构和下料结构组成,所述输送结构的右端设有下料结构,且通过输送结构将零件输送至下料结构上;
8.所述输送结构的中端设有检测结构,通过检测结构形成对零件进行检测。
9.作为本发明所述的一种自动化机械加工零件自动加工分拣设备的一种优选方案,其中:所述输送结构包括四组传输支撑板,两组所述传输支撑板之间通过轴承转动连接转轴,所述转轴上固定安装滚筒,两组所述滚筒之间通过传输带传动连接,左侧所述传输支撑板上安装有第一驱动组件,且第一驱动组件的输出端与左侧转轴相连接。
10.作为本发明所述的一种自动化机械加工零件自动加工分拣设备的一种优选方案,其中:所述第一驱动组件包括第一箱体,所述第一箱体固定安装在左侧传输支撑板上,所述第一箱体内壁安装第一伺服电机,所述第一伺服电机的输出轴通过轴承与左侧所述转轴固定连接。
11.作为本发明所述的一种自动化机械加工零件自动加工分拣设备的一种优选方案,其中:所述检测结构包括支架,所述支架的内侧设有输送结构,所述支架上设有检测系统。
12.作为本发明所述的一种自动化机械加工零件自动加工分拣设备的一种优选方案,其中:所述检测系统包括采集模块,所述采集模块连接对比模块,所述对比模块连接储存模块,所述对比模块连接处理器,所述处理器连接控制模块,所述控制模块连接下料结构。
13.作为本发明所述的一种自动化机械加工零件自动加工分拣设备的一种优选方案,其中:所述采集模块是由内部检测模块和外部检测模块组成,所述内部检测模块和所述外部检测模块设在支架的顶端内壁上。
14.作为本发明所述的一种自动化机械加工零件自动加工分拣设备的一种优选方案,其中:所述下料结构包括两组下料长支撑板、两组下料短支撑板和两组螺杆,两组所述下料长支撑板之间通过轴承转动连接螺杆,两组所述下料短支撑板之间通过轴承转动连接螺杆;
15.所述螺杆的两端均螺纹连接螺母,所述螺母固定安装在滑块上,所述滑块固定安装在下料滑板的底部两端上,所述下料滑板与输送结构之间的夹角为30
°
~60
°
;
16.所述下料长支撑板上安装有第二驱动组件,且第二驱动组件的输出端与左侧螺杆相连接;
17.两组所述螺杆之间通过传动组件相连接。
18.作为本发明所述的一种自动化机械加工零件自动加工分拣设备的一种优选方案,其中:所述第二驱动组件包括第二箱体,所述第二箱体固定安装在下料长支撑板上,所述第二箱体内壁安装第二伺服电机,所述第二伺服电机的输出轴通过轴承与左侧螺杆固定连接。
19.作为本发明所述的一种自动化机械加工零件自动加工分拣设备的一种优选方案,其中:所述传动组件包括皮带轮,所述皮带轮内壁固定安装螺杆,两组所述皮带轮之间通过皮带传动连接。
20.一种自动化机械加工零件自动加工分拣方法,包括具体步骤如下:
21.s1,通过第一伺服电机使转轴带动滚筒进行旋转,旋转的滚筒就会带动传输带进行转动,当传输带转动时,通过机械手臂将零件依次放入到传输带上,且每组零件之间有一定的距离;
22.s2,当把零件放入到传输带上时,传输带就会带动零件进行移动,当移动的零件经过检测结构时,外部检测模块就会对零件的外形进行采集,以及内部检测模块就会对零件的内部结构进行检测,从而判断零件的内部结构是否符合标准,当通过外部检测模块对零件的外形进行采集后,外部检测模块就会将采集的数据传递给对比模块,当对比模块接收到数据后,对比模块就会将所接收的数据与储存模块中所储存的数据进行对比,从而判断所接收的数据与储存模块中所储存的数据是否有一致的,若是有此零件外形则符合标准,反之,此零件外形则不符合标准;
23.s3,当对比模块对比后,对比模块就会将对比的数据传输给处理器,同时,内部检测模块也会将检测的数据传输给处理器,当处理器接收数据后,处理器就会根据接收的数据对控制模块进行控制,从而通过控制模块对下料结构进行控制;
24.s4,当零件的外形和零件的内部都符合标准时,控制模块就会对第二伺服电机进行控制,从而通过第二伺服电机使螺杆进行旋转,旋转的螺杆就会通过螺母使下料滑板进行移动,直至一组下料滑板位于输送结构的一侧,从而通过输送结构将符合标准的零件送入到相对应的下料滑板中,当零件的外形或零件的内部不符合标准时,控制模块就会对第二伺服电机进行控制,从而通过第二伺服电机使螺杆进行反向旋转,反向旋转的螺杆就会通过螺母使下料滑板进行反向移动,直至另一组下料滑板位于输送结构的一侧,从而通过
输送结构将不符合标准的零件送入到相对应的下料滑板中,这样就会对零件进行自动化分拣。
25.与现有技术相比:
26.通过输送结构对零件进行输送,同时,通过检测结构对输送的零件进行检测,检测后,再通过下料结构对检测后的零件进行分开下料,从而达到对零件进行自动化分拣,通过对零件进行自动化分拣,不仅会提高分拣效率,还会降低劳动强度和降低劳动成本。
附图说明
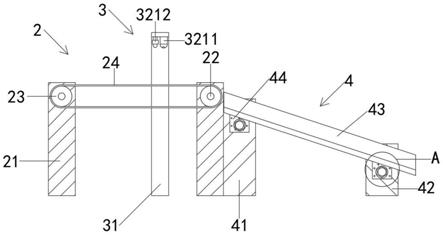
27.图1为本发明结构正视示意图;
28.图2为本发明图1中a处结构放大示意图;
29.图3为本发明结构俯视示意图;
30.图4为本发明检测结构侧视示意图;
31.图5为本发明下料滑板结构示意图;
32.图6为本发明检测系统流程示意图。
33.图中:输送结构2、传输支撑板21、转轴22、滚筒23、传输带24、第一驱动组件25、第一箱体251、第一伺服电机252、检测结构3、支架31、检测系统32、采集模块321、内部检测模块3211、外部检测模块3212、对比模块322、储存模块323、处理器324、控制模块325、下料结构4、下料长支撑板41、下料短支撑板42、下料滑板43、滑块44、螺母45、螺杆46、第二驱动组件47、第二箱体471、第二伺服电机472、传动组件48、皮带轮481、皮带482。
具体实施方式
34.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式作进一步地详细描述。
35.本发明提供一种自动化机械加工零件自动加工分拣设备,具有提高分拣效率的优点,请参阅图1
‑
图6,包括自动化分拣设备,自动化分拣设备是由输送结构2、检测结构3和下料结构4组成,输送结构2的右端设有下料结构4,且通过输送结构2将零件输送至下料结构4上;
36.输送结构2的中端设有检测结构3,通过检测结构3形成对零件进行检测。
37.进一步的,输送结构2包括四组传输支撑板21,两组传输支撑板21之间通过轴承转动连接转轴22,转轴22上固定安装滚筒23,两组滚筒23之间通过传输带24传动连接,左侧传输支撑板21上安装有第一驱动组件25,且第一驱动组件25的输出端与左侧转轴22相连接。
38.进一步的,第一驱动组件25包括第一箱体251,第一箱体251固定安装在左侧传输支撑板21上,第一箱体251内壁安装第一伺服电机252,第一伺服电机252的输出轴通过轴承与左侧转轴22固定连接。
39.进一步的,检测结构3包括支架31,支架31的内侧设有输送结构2,支架31上设有检测系统32。
40.进一步的,检测系统32包括采集模块321,采集模块321连接对比模块322,对比模块322连接储存模块323,对比模块322连接处理器324,处理器324连接控制模块325,控制模块325连接下料结构4,具体的,储存模块323具有储存符合标准零件的相关图像作用,通过
对比模块322具有将外部检测模块3212所采集的外形图像与储存模块323中所储存的相关图像进行对比的作用。
41.进一步的,采集模块321是由内部检测模块3211和外部检测模块3212组成,内部检测模块3211和外部检测模块3212设在支架31的顶端内壁上,具体的,内部检测模块3211优选为探伤仪,探伤仪主要用于探测机加工件内部有无缺陷,焊缝是否合格,查找有无暗伤,从而判定工件合格与否,外部检测模块3212优选为摄像头,通过,外部检测模块3212具有对零件的外形进行采集的作用。
42.进一步的,下料结构4包括两组下料长支撑板41、两组下料短支撑板42和两组螺杆46,两组下料长支撑板41之间通过轴承转动连接螺杆46,两组下料短支撑板42之间通过轴承转动连接螺杆46;
43.螺杆46的两端均螺纹连接螺母45,螺母45固定安装在滑块44上,滑块44固定安装在下料滑板43的底部两端上,下料滑板43与输送结构2之间的夹角为30
°
~60
°
;
44.下料长支撑板41上安装有第二驱动组件47,且第二驱动组件47的输出端与左侧螺杆46相连接;
45.两组螺杆46之间通过传动组件48相连接,具体的,下料滑板43与输送结构2之间的夹角优选为45
°
,通过将下料滑板43与输送结构2之间的夹角设置为30
°
~60
°
具有便于将零件滑下去的作用,下料滑板43的下料端口具有与外部收集箱进行连接的作用。
46.进一步的,第二驱动组件47包括第二箱体471,第二箱体471固定安装在下料长支撑板41上,第二箱体471内壁安装第二伺服电机472,第二伺服电机472的输出轴通过轴承与左侧螺杆46固定连接。
47.进一步的,传动组件48包括皮带轮481,皮带轮481内壁固定安装螺杆46,两组皮带轮481之间通过皮带482传动连接。
48.一种自动化机械加工零件自动加工分拣方法,包括具体步骤如下:
49.s1,通过第一伺服电机252使转轴22带动滚筒23进行旋转,旋转的滚筒23就会带动传输带24进行转动,当传输带24转动时,通过机械手臂将零件依次放入到传输带24上,且每组零件之间有一定的距离;
50.s2,当把零件放入到传输带24上时,传输带24就会带动零件进行移动,当移动的零件经过检测结构3时,外部检测模块3212就会对零件的外形进行采集,以及内部检测模块3211就会对零件的内部结构进行检测,从而判断零件的内部结构是否符合标准,当通过外部检测模块3212对零件的外形进行采集后,外部检测模块3212就会将采集的数据传递给对比模块322,当对比模块322接收到数据后,对比模块322就会将所接收的数据与储存模块323中所储存的数据进行对比,从而判断所接收的数据与储存模块323中所储存的数据是否有一致的,若是有此零件外形则符合标准,反之,此零件外形则不符合标准;
51.s3,当对比模块322对比后,对比模块322就会将对比的数据传输给处理器324,同时,内部检测模块3211也会将检测的数据传输给处理器324,当处理器324接收数据后,处理器324就会根据接收的数据对控制模块325进行控制,从而通过控制模块325对下料结构4进行控制;
52.s4,当零件的外形和零件的内部都符合标准时,控制模块325就会对第二伺服电机472进行控制,从而通过第二伺服电机472使螺杆46进行旋转,旋转的螺杆46就会通过螺母
45使下料滑板43进行移动,直至一组下料滑板43位于输送结构2的一侧,从而通过输送结构2将符合标准的零件送入到相对应的下料滑板43中,当零件的外形或零件的内部不符合标准时,控制模块325就会对第二伺服电机472进行控制,从而通过第二伺服电机472使螺杆46进行反向旋转,反向旋转的螺杆46就会通过螺母45使下料滑板43进行反向移动,直至另一组下料滑板43位于输送结构2的一侧,从而通过输送结构2将不符合标准的零件送入到相对应的下料滑板43中,这样就会对零件进行自动化分拣。
53.虽然在上文中已经参考实施方式对本发明进行了描述,然而在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本发明所披露的实施方式中的各项特征均可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本发明并不局限于文中公开的特定实施方式,而是包括落入权利要求的范围内的所有技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1