一种智能金库的自动分拣系统的制作方法
1.本发明涉及系统管理技术领域,具体涉及一种智能金库的自动分拣系统。
背景技术:
2.当前金库中由于历史遗留原因,现有库管员老龄化严重,且在金库中,每天押运车运过来的款箱分为调缴款箱、寄存箱和贵金属箱等,入库的时候是会混合码放至同一托盘上,但在金库存储中却要将这些混合码放的箱子进行区分后分别码放,因此需要在金库中对款箱进行分拣。当前情况下,都是人工根据款箱颜色进行分拣并码放至另一托盘后再运至相应存储区域内,金库中人员劳动强度大,会造成效率低、差错率高等问题。另外,人员在金库内作业,人员管理风险较大,会发生监守自盗的情况。且人员操作必须预留足够的操作空间,导致库房利用率低。在现有金库中,各个环节都相对独立,都是信息孤岛,通过纸质单据流转来进行信息确认,追溯性极差。
技术实现要素:
3.本发明所要解决的技术问题是提供一种智能金库的自动分拣系统,可以解决人员劳动强度大以及差错率高的问题,且形成无人的智能仓储,任意环节都可追溯。
4.本发明解决上述技术问题的技术方案如下:一种智能金库的自动分拣系统,包括运输机器人、初始分拣机器人、二次分拣输送线、人工分拣输送线、二次分拣机器人以及空款箱上架机器人;
5.所述运输机器人,其用于将网点上缴的款箱从交接缓存区运输至初始分拣区的预设接驳位上;
6.所述初始分拣机器人,其位于所述初始分拣区内,并用于对所述预设接驳位上的款箱进行定位、抓取并识别所述款箱的类别,且根据所述款箱的类别将所述款箱分拣至所述初始分拣区内对应的款箱接驳位托盘上,或分拣至所述二次分拣输送线上,或分拣至所述人工分拣输送线上;
7.所述二次分拣输送线,其用于将所述初始分拣机器人分拣过来的款箱运送至二次分拣区;
8.所述二次分拣机器人,其位于所述二次分拣区内,并用于将所述二次分拣输送线输送过来的款箱分拣至所述二次分拣区内对应的款箱接驳位托盘上;
9.所述人工分拣输送线,其用于将所述初始分拣机器人分拣过来的款箱运送至人工分拣区,并直接或在所述二次分拣输送线的配合下将所述人工分拣区产生的空款箱输送至空款箱存储区;
10.所述空款箱上架机器人,其位于所述空款箱存储区内,并用于将所述人工分拣输送线直接或在所述二次分拣输送线的配合下输送过来的空款箱分拣至所述空款箱存储区内的空款箱货位上。
11.本发明的有益效果是:本发明一种智能金库的自动分拣系统将押运车运送到金库
的网点上缴的各类款箱,依据不同的功能及存放的货品,在入库处理各项业务前,先进行各类款箱的分拣处理;其中网点上缴的需人工开箱进行核验处理的款箱在进行人工分拣后对空款箱进行回收处理,实现款箱的自动分拣任务;因此,通过本系统可以解决人员劳动强度大以及差错率高的问题,且形成无人的智能仓储,做到金库的无人化,同时任意环节都可追溯,提高了现金运营中心库房风险防控水平、实物仓储能力、业务处理能力、库房自动化管理水平,实现信息化管理、智能化仓储。
12.在上述技术方案的基础上,本发明还可以做如下改进。
13.进一步,还包括控制终端,所述控制终端分别与所述运输机器人、所述初始分拣机器人、所述二次分拣输送线、所述人工分拣输送线、所述二次分拣机器人以及所述空款箱上架机器人交互,并对所述运输机器人、所述初始分拣机器人、所述二次分拣输送线、所述人工分拣输送线、所述二次分拣机器人以及所述空款箱上架机器人的运行进行统一调度控制。
14.采用上述进一步方案的有益效果是:控制终端对运输机器人、初始分拣机器人、二次分拣输送线、人工分拣输送线、二次分拣机器人以及空款箱上架机器人的运行进行统一调度控制,实现一体化的智能控制,系统集成度高,控制能力强且精准。
15.进一步,所述二次分拣输送线为折弯结构,在所述二次分拣输送线的折弯处设置有第一90
°
移载机。
16.采用上述进一步方案的有益效果是:折弯结构的二次分拣输送线可以解决场地受限的问题,针对不同的场地形状设置不同结构的二次分拣输送线,且在折弯处设置90
°
移载机,保证款箱在拐弯处平稳的运输。
17.进一步,在所述二次分拣输送线的首尾两端以及所述第一90
°
移载机的位置处两侧均设有到位检测传感器。
18.采用上述进一步方案的有益效果是:到位检测传感器可以在货物到达位置后输出到位信息,方便后一级设备接着进行相应的处理,保证系统运行的稳定性。
19.进一步,当所述人工分拣输送线用于在所述二次分拣输送线的配合下将所述人工分拣区产生的空款箱输送至空款箱存储区时,所述人工分拣输送线的尾端设置有第二90
°
移载机,在所述二次分拣输送线上且与所述第二90
°
移载机对应的位置上设有第三90
°
移载机。
20.采用上述进一步方案的有益效果是:第二90
°
移载机和第三90
°
移载机可以将人工分拣输送线上传输的空款箱转移至二次分拣输送线上继续输送至空款箱存储区,实现款箱在不同输送线上的输送路径切换。
21.进一步,在所述人工分拣输送线的首尾两端均设有到位检测传感器,在所述二次分拣输送线的所述第三90
°
移载机的位置处设有到位检测传感器。
22.采用上述进一步方案的有益效果是:到位检测传感器可以在货物到达位置后输出到位信息,方便后一级设备接着进行相应的处理,保证系统运行的稳定性。
23.进一步,所述人工分拣区内配设有用于存储不同类别货款的货架。
24.采用上述进一步方案的有益效果是:人工分拣区内配设有用于存储不同类别货款的货架,方便人工分拣后对不同类别货款的分类存储。
25.进一步,所述款箱表面设置有用于记载唯一识别号的rfid标签,所述唯一识别号
用于表征款箱类别信息。
26.采用上述进一步方案的有益效果是:rfid标签的设置,方便分拣机器人获取款箱类别信息。
27.进一步,所述初始分拣机器人与所述二次分拣机器人的结构相同,均包括机器人本体以及集成在所述机器人本体上的3d视觉识别组件、真空抓取组件和rfid识别组件;
28.所述3d视觉识别组件,其用于对所述款箱进行识别定位,并生成款箱定位信息;
29.所述真空抓取组件,其末端具体为真空吸盘矩阵,并用于根据所述款箱定位信息抓取所述款箱
30.所述rfid识别组件,其用于读取所述真空抓取组件抓取的所述款箱上的rfid标签记载的唯一识别号,,并通过所述唯一识别号识别出所述款箱的类别。
31.采用上述进一步方案的有益效果是:分拣机器人上的3d视觉识别组件主要是获取款箱的位置,方便真空抓取组件精准的抓取款箱,真空抓取组件末端具体为真空吸盘矩阵,在稳固抓取款箱的同时保护款箱不受损伤。
32.进一步,所述人工分拣输送线设置在所述二次分拣输送线的正下方,所述二次分拣输送线的正上方设置有空款箱输送线,所述空款箱输送线与所述人工分拣输送线在空间上异位对接。
33.采用上述进一步方案的有益效果是:人工分拣输送线设置在二次分拣输送线的正下方,且在二次分拣输送线的正上方设置空款箱输送线,那么二次分拣输送线专门用于输送分拣至二次分拣输送线c移载位的款箱,而人工处理后产生的空款箱在人工分拣输送线上输送至尽头时,即可通过第二90
°
移载机移载至空款箱输送线,由空款箱输送线输送空款箱至指定的位置;这样,分拣至二次分拣输送线c移载位的款箱以及因为人工处理后的空款箱分层传输,避免分拣至二次分拣输送线c移载位的款箱以及人工处理后产生的空款箱同时在二次分拣输送线上输送的控制逻辑复杂、出错概率大的问题。
附图说明
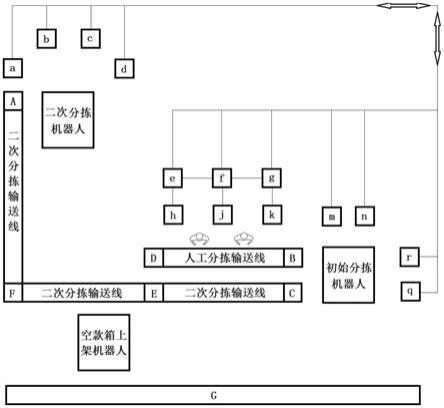
34.图1为本发明一种智能金库的自动分拣系统的一种结构示意图;
35.图2为初始分拣机器人的结构示意图;
36.图3为本发明一种智能金库的自动分拣系统的另一种结构示意图。
具体实施方式
37.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
38.款箱自动分拣指的是将押运车运送到金库的网点上缴的各类款箱,依据不同的功能及存放的货品,在入库处理各项业务前,先进行各类款箱的分拣处理。其中网点上缴的调缴箱,需人工开箱进行核验处理调缴款箱内的货品。款箱的自动分拣,需优先获取网点上缴款箱信息数据,后台系统处理,生成款箱分拣指令,底层分拣系统开始自动运行,实现款箱的自动分拣任务。以下具体说明本发明的智能金库的自动分拣系统。
39.如图1所示,一种智能金库的自动分拣系统,包括运输机器人、设置在初始分拣区内的初始分拣机器人、设置在二次分拣区内的二次分拣机器人、设置在空款箱存储区内的
空款箱上架机器人、连接初始分拣区与二次分拣区的二次分拣输送线、连接初始分拣区与人工分拣区的人工分拣输送线。
40.所述运输机器人(图1未示出),其用于将网点上缴的款箱从交接缓存区运输至初始分拣区的预设接驳位上。
41.在本具体实施例中,初始分拣区的预设接驳位为如图1所示的r位,且预设接驳位靠近初始分拣机器人设置且在初始分拣机器人的作业范围内。另外,所述款箱表面设置有用于记载唯一识别号的rfid标签,所述唯一识别号用于表征款箱类别信息。rfid标签的设置,方便初始分拣机器人和二次分拣机器人获取款箱类别信息。
42.所述初始分拣机器人,其用于对所述预设接驳位上的款箱进行定位、抓取并识别所述款箱的类别,且根据所述款箱的类别将所述款箱分拣至所述初始分拣区内对应的款箱接驳位托盘上,或分拣至所述二次分拣输送线上,或分拣至所述人工分拣输送线上。
43.在本具体实施例中,如图2所示,所述初始分拣机器人包括机器人本体1以及集成在所述机器人本体1上的3d视觉识别组件2、真空抓取组件3和rfid识别组件4;所述3d视觉识别组件2,其用于对所述款箱进行识别定位,并生成款箱定位信息;所述真空抓取组件3,其末端具体为真空吸盘矩阵,并用于根据所述款箱定位信息抓取所述款箱;所述rfid识别组件4,其用于读取所述真空抓取组件3抓取的所述款箱上的rfid标签记载的唯一识别号,并通过所述唯一识别号识别出所述款箱的类别;rfid标签提供唯一识别号,将该唯一识别号识别后上传后台系统,后台系统根据唯一识别号区分该款箱的类别。分拣机器人上的3d视觉识别组件2主要是获取款箱的位置,方便真空抓取组件精准的抓取款箱,真空抓取组件3末端具体为真空吸盘矩阵,在稳固抓取款箱的同时保护款箱不受损伤。
44.在本具体实施例中,对于不同的款箱需要存放至不同的位置,对于需要人工核验的款箱还要进行人工分拣;因此,有的款箱只需进行一次分拣即可就位存放;而有的款箱需要进行二次或更多次分拣才能到达指定的区域存放,本实施例只介绍二次分拣,对于更多次的分拣,后续可以根据本技术记载的内容合理设置更多的分拣机器人和输送线即可视线二次以上的分拣。本实施例所述款箱的类别包括档案箱、寄存箱、凭证箱、外币箱、贵金属箱和调缴款箱;其中,档案箱和寄存箱需要放置在初始分拣区内对应的款箱接驳位托盘上;凭证箱、外币箱以及贵金属箱需要放置在二次分拣区对应的款箱接驳位托盘上;调缴款箱需要输送至人工分拣区进行人工核验。因此,当初始分拣机器人通过款箱上的rfid标签记载的款箱类别信息判断出款箱属于档案箱或寄存箱时,初始机器人则将款箱分拣至初始分拣区内的对应的款箱接驳位托盘上;其中,初始分拣区内的m接驳位为用于存放档案箱的款箱接驳位,初始分拣区内的n接驳位为用于存放寄存箱的款箱接驳位;初始分拣区内的q接驳位为预留位置。当初始分拣机器人通过款箱上的rfid标签记载的款箱类别信息判断出款箱属于凭证箱或外币箱或贵金属箱时,初始机器人则将款箱分拣至二次分拣输送线首端的c移载位上。当初始分拣机器人通过款箱上的rfid标签记载的款箱类别信息判断出款箱属于调缴款箱时,初始机器人则将款箱分拣至人工分拣输送线首端的b移载位上。
45.所述二次分拣输送线,其用于将所述初始分拣机器人分拣过来的款箱运送至二次分拣区。
46.在本具体实施例中,所述二次分拣输送线为正反双向运输的滚筒线;另外,所述二次分拣输送线为折弯结构,在所述二次分拣输送线的折弯处设置有第一90
°
移载机。折弯结
构的二次分拣输送线可以解决场地受限的问题,针对不同的场地形状设置不同结构的二次分拣输送线,且在折弯处设置90
°
移载机,保证款箱在拐弯处平稳的运输。
47.进一步,在所述二次分拣输送线的首尾两端以及所述第一90
°
移载机的位置两侧处均设有到位检测传感器。到位检测传感器可以在货物到达位置后输出到位信息,方便后一级设备接着进行相应的处理,保证系统运行的稳定性。
48.第一90
°
移载机两侧设置有到位传感器,二次分拣输送线由右向左运行时,当第一90
°
移载机左侧的到位检测传感器检测到款箱未继续向前运行,且位于其右侧的到位检测传感器也检测到有款箱到达后,会立即停止该段输送线的运转,避免款箱在输送线上相撞。另外,二次分拣输送线为滚筒输送线,分段控制,每段滚筒输送线长度为一个款箱长度的1.2倍,每一段输送线前方均安装有一个到位检测传感器。若某一段输送线上的到位检测传感器未感应到款箱到达,则该段输送线也不运行,起到节能的作用。
49.具体的,所述二次分拣输送线的折弯位置处为f位置(即f移载位)处,因此f移载位处设有第一90
°
移载机;另外,在所述二次分拣输送线首端的c移载位、末端的a移载位以及折弯处的f移载位均设有到位检测传感器。当初始分拣机器人将凭证箱或外币箱或贵金属箱分拣至所述二次分拣输送线首端的c移载位时,二次分拣输送线首端的c移载位上的到位检测传感器检测到款箱到位后,且初始分拣机器人的放置动作已经完成同时初始分拣机器人的真空吸盘矩阵已经离开二次分拣输送线首端的c移载位时,二次分拣输送线开始运行,当二次分拣输送线将款箱运送至f移载位时,f移载位处的到位传感器检测到款箱到位,启动f移载位处的第一90
°
移载机,改变款箱的输送方向,将款箱移载至二次分拣输送线末端的a移载位,款箱流转至二次分拣输送线末端的a移载位后,二次分拣输送线末端的a移载位处的到位传感器检测到款箱到位,到位信号反馈至二次分拣机器人,二次分拣机器人启动开始执行分拣任务。
50.所述二次分拣机器人,其用于将所述二次分拣输送线输送过来的款箱分拣至所述二次分拣区内对应的款箱接驳位托盘上。
51.在本具体实施例中,二次分拣机器人的结构与初始分拣机器人的结构相同。二次分拣机器人在收到二次分拣输送线末端的a移载位处的到位传感器输出的到位信号后,启动3d视觉识别组件对二次分拣输送线末端的a移载位处的款箱进行识别定位,并生成款箱定位信息;真空抓取组件根据所述款箱定位信息抓取所述款箱,之后通过rfid识别组件对款箱的类别进行二次识别,识别出二次分拣输送线末端的a移载位处的款箱是为凭证箱或为外币箱亦或为贵金属箱。最后二次分拣机器人将款箱分拣至二次分拣区内的对应的款箱接驳位托盘上;其中,二次分拣区内的a接驳位为用于存放凭证箱的款箱接驳位,二次分拣区内的d接驳位为用于存放外币箱的款箱接驳位,二次分拣区内的c接驳位为用于存放贵金属箱的款箱接驳位,二次分拣区内的b接驳位为预留位置。
52.所述人工分拣输送线,其用于将所述初始分拣机器人分拣过来的款箱运送至人工分拣区,并直接或在所述二次分拣输送线的配合下将所述人工分拣区产生的空款箱输送至空款箱存储区。
53.在本具体实施例中,当所述人工分拣输送线用于在所述二次分拣输送线的配合下将所述人工分拣区产生的空款箱输送至空款箱存储区时,所述人工分拣输送线的尾端设置有第二90
°
移载机,在所述二次分拣输送线上且与所述第二90
°
移载机对应的位置上设有第
三90
°
移载机。第二90
°
移载机和第三90
°
移载机可以将人工分拣输送线上传输的空款箱转移至二次分拣输送线上继续输送至空款箱存储区,实现款箱在不同输送线上的输送路径切换。
54.进一步,所述人工分拣输送线为正反双向运输的滚筒线;另外,在所述人工分拣输送线的首尾两端均设有到位检测传感器,在所述二次分拣输送线的所述第三90
°
移载机的位置处设有到位检测传感器。到位检测传感器可以在货物到达位置后输出到位信息,方便后一级设备接着进行相应的处理,保证系统运行的稳定性。
55.在本具体实施例中,对于调缴款箱,需人工开箱进行核验处理调缴款箱内的货品。因此,初始分拣机器人将识别出的调缴款箱分拣至人工分拣输送线首端的b移载位处,人工分拣输送线首端的b移载位处的到位检测传感器检测到款箱到位后,且初始分拣机器人放置动作已经完成,同时真空吸盘矩阵已经离开人工分拣输送线首端的b移载位处,人工分拣输送线开始运行,人工分拣输送线将调缴箱运送至人工分拣区内的人工位,人工开箱,对调缴款箱内的货品进行核验。所述人工分拣区内配设有用于存储不同类别货款的货架,人工或通过agv小车将调缴箱内零散的贵金属分拣至k接驳位处的贵金属货架上,外币分拣至h接驳位处的外币货架上,人民币现金分拣至g接驳位处的空周转箱,人工分拣区内的e、f、j接驳位为预留位置;人工分拣完成产生的空款箱,人工将空款箱箱盖关闭,通过确认按钮将空款箱放行,空款箱沿着人工分拣输送线流转至末端的d移载位处,人工分拣输送线末端的d移载位处的到位传感器检测到空款箱到位后,人工分拣输送线末端的d移载位处的第二90
°
移载机开始运行,将空款箱移载至二次分拣输送线的e移载位处,二次分拣输送线的e移载位处的到位检测传感器检测到空款箱到位后,二次分拣输送线的e移载位处的第三90
°
移载机将空款箱移至二次分拣输送线上,二次分拣输送线载着空款箱沿线体流向f移载位,f移载位处的到位检测传感器检测到空款箱到位信号,空款箱上架机器人启动,将空款箱拣至所述空款箱存储区内空款箱货位的货架上,图1中的g即为空款箱存储区内空款箱货位的货架。
56.在另外的实施例中,人工分拣输送线输送的空款箱在到达末端d移载位处后,可以直接将d移载位处的空款箱分拣至所述空款箱存储区内的空款箱货位上。
57.由于分拣至二次分拣输送线上c移载位的款箱以及因为人工处理后的空款箱在二次分拣输送线的ef段重叠运行,在e移载位处会因为等待影响效率,且在ef段为跟踪款箱,是要对在f移载位处转弯还是等待上架机器人上架进行区分,控制逻辑相对复杂、出错概率较大,但该方案的好处是成本低。为了避免控制逻辑复杂、出错概率大问题,在其他实施例中对上述方案进行进一步优化,即:
58.所述人工分拣输送线设置在所述二次分拣输送线的正下方,所述二次分拣输送线的正上方设置有空款箱输送线,所述空款箱输送线与所述人工分拣输送线在空间上异位对接。具体的,如图3所示,hi代表空款箱输送线,空款箱输送线(hi段)位于二次分拣输送线的ef段的正上方且与ef段对齐;人工分拣输送线(bd段)位于二次分拣输送线的ce段的正下方,人工分拣输送线(bd段)比二次分拣输送线的ce段要短1.5倍的款箱长度,方便位于下层的人工分拣输送线d载位处的第二90
°
移载机将空款箱放置至空款箱输送线(hi段)上的h移载位。另外,空款箱输送线上的i移载位处设置有第四90
°
移载机,第四90
°
移载机只是为了将横线运输的空款箱变为竖向,方便空款箱上架机器人抓取上架。
59.人工分拣输送线设置在二次分拣输送线的正下方,且在二次分拣输送线的正上方设置空款箱输送线,那么二次分拣输送线专门用于输送分拣至二次分拣输送线c移载位的款箱;二次分拣输送线的f载位处的第一90
°
移载机只作为转弯用,不作为空款箱上架机器人抓取的接驳位;而人工处理后产生的空款箱在人工分拣输送线上输送至尽头(d载位处)时,即可通过第二90
°
移载机移载至空款箱输送线,由空款箱输送线输送空款箱至指定的位置(h载位处);这样,分拣至二次分拣输送线c移载位的款箱以及因为人工处理后的空款箱分层传输,避免分拣至二次分拣输送线c移载位的款箱以及人工处理后产生的空款箱同时在二次分拣输送线上输送的控制逻辑复杂、出错概率大的问题。
60.本发明的系统还包括控制终端,所述控制终端分别与所述运输机器人、所述初始分拣机器人、所述二次分拣输送线、所述人工分拣输送线、所述二次分拣机器人以及所述空款箱上架机器人交互,并对所述运输机器人、所述初始分拣机器人、所述二次分拣输送线、所述人工分拣输送线、所述二次分拣机器人以及所述空款箱上架机器人的运行进行统一调度控制。控制终端对运输机器人、初始分拣机器人、二次分拣输送线、人工分拣输送线、二次分拣机器人以及空款箱上架机器人的运行进行统一调度控制,实现一体化的智能控制,系统集成度高,控制能力强且精准。
61.在本发明一种智能金库的自动分拣系统进行自动分拣之前,还需提前控制运输机器人进行如下调度:调度空托盘至初始分拣区的m、n接驳位;调度外币货架与贵金属货架分别至人工分拣区的h、k接驳位,调度空周转箱托盘至人工分拣区的g接驳位;调度空托盘至二次分拣区的a、c、d接驳位。在所有款箱分拣完成后,还需调度运输机器人将所有托盘送至相应的区域存放。
62.本发明一种智能金库的自动分拣系统将押运车运送到金库的网点上缴的各类款箱,依据不同的功能及存放的货品,在入库处理各项业务前,先进行各类款箱的分拣处理;其中网点上缴的需人工开箱进行核验处理的款箱在进行人工分拣后对空款箱进行回收处理,实现款箱的自动分拣任务;因此,通过本系统可以解决人员劳动强度大以及差错率高的问题,且形成无人的智能仓储,做到金库的无人化,解决了智能金库运行过程中出现的工作人员老龄化、人工劳动强度大、差错率高等问题;同时任意环节都可追溯,提高了现金运营中心库房风险防控水平、实物仓储能力、业务处理能力、库房自动化管理水平,实现信息化管理、智能化仓储。
63.本发明可以实现车辆智能入场管理,人员不见面自动交接、款箱自动分拣、现金自动配款、款箱自动运输、实物自动出入库、智能仓储。符合现金运营中心管理工作标准,智能化金库能够提高工行中心金库业务风险防控能力、减少人力劳动、提升金库运营效率、降低运营成本。
64.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1