可提高板材利用率的分拣装置的制作方法
1.本实用新型涉及一种可提高板材利用率的分拣装置,属于板材加工技术领域。
背景技术:
2.板材加工生产线用于对木质板材的加工,木质板材的加工包括板材的裁板、贴标、铣型、封边等工序,其中板材的裁板、贴标和铣型在板材加工模块完成,板材加工模块对板材加工后,将板材输送至封边工序继续对板材进行加工,并最终完成板材的加工。现有的板材加工生产线,板材加工模块在对板材进行裁板加工得到规格板件时,将裁切掉的多余板件(即异形板件)直接打碎成木屑,而板材加工产生的异形板件并非毫无用处,在一些需要较小的板材处,如门板的装饰条等,还可以利用,当前也有一些板件的加工,为了美观,特意将板件裁小后再进行拼接,以拼出想要的板材花样,板材加工产生的异形板件用于拼接上述板件,也可以实现异形板件的再利用,而现有的板材加工生产线中,由于缺少相应的异形板件分拣模块,因此板材加工产生的异形板件无法收集,只能在加工板材时打碎,以致板材的利用率难以得到有效的提高。
技术实现要素:
3.本实用新型其中的一个目的是提供一种可提高板材利用率的分拣装置,解决现有技术板材加工中由于没有设置异形板件放置的模块,将产生的异形板件直接打碎而致板材利用率低的技术缺陷。
4.为解决上述问题,本实用新型所采取的技术方案是:可提高板材利用率的分拣系统,包括板材下料模块、机器人分拣装置、异形板件分拣模块和规格板件分拣模块;板材下料模块在使用状态下位于板材加工模块板材输出的一端,用于接收板材加工模块加工后的板材,机器人分拣装置用于将板材下料模块上的异形板件和规格板件分别放置于异形板件分拣模块和规格板件分拣模块上,规格板件分拣模块用于将规格板件输送至指定位置,异形板件分拣模块用于收集异形板件。本实用新型设置异形板件分拣模块和机器人分拣装置,在木板被加工后,由机器人分拣装置吸取并放置在异形板件分拣模块上,使异形板件被收集,以在其它程序的加工中使用,相较于现有技术中将异形板件直接打碎的方式,本实用新型提高了板材的利用率,本实用新型也避免由于打碎木材而产生的木质粉尘,提高板材加工的环境,以及减少打碎异形板件所需的能量,节约板材加工的能量,总体上提高板材加工的经济性。
5.作为本实用新型的进一步改进,板材下料模块和异形板件分拣模块的数量均为两个,规格板件分拣模块为一个以上,两个板材下料模块平行设置,并且在使用状态下分别用于接收两个板材加工模块加工后的板材,机器人分拣装置位于两个板材下料模块之间,两个异形板件分拣模块分别位于规格板件分拣模块的两侧。本实用新型由于板材在板材加工模块上的加工需要时间,本实用新型设置两个板材下料模块,本实用新型可同时加工两块板材,并且由同一个机器人分拣装置吸取两个板材下料模块上的规格板材及异形板材放置
在规格板材分拣模块和异形板材分拣模块上,进一步的提高板材加工的效率。
6.作为本实用新型的进一步改进,规格板件分拣模块处设置有升降台,升降台升起时,机器人分拣装置将下料模块上的规格板放置在升降台上。本实用新型设置升降台,在规格板后续加工发生故障时,将规格板放置在升降台上,仅需后续发生故障处停机检修即可,前面板材加工的工序不需停机,更进一步的提高板材的加工效率。
7.作为本实用新型的进一步改进,规格板件分拣模块的数量为两个,两个规格板件分拣模块平行设置,并且每个规格板件分拣模块靠近机器人分拣装置的一端处各设置有一个升降台。本实用新型中两个规格板件分拣模块分别用于输送两个板材下料模块上的规格板件或者将两个板材下料模块上的规格板件放置在任意一个规格板件分拣模块上向前输送,在其中一个规格板件分拣模块发生故障时,不影响另一个规格板件分拣模块对规格板件的输送。
8.作为本实用新型的进一步改进,异形板件分拣模块上设置有托架,托架包括多个托架单元,托架单元的两端分别设置在异形板件分拣模块的两侧,用于支撑体积较大的异形板件。本实用新型在异形板件分拣模块上设置托架,在异形板件分拣模块上放置异形板件,剩余的空间不能再放置一块较大的异形板件,而只能将较大的异形板件向上叠置,该较大的异形板件会有部分悬空时,先效较大的异形板件放置在托架上,在机器人分拣装置吸取其它较小的异形板件,将异形板件分拣模块上码平时,再将前述较大的异形板件向上叠置在异形板件分拣模块上的异形板件上,提高异形板件放置的稳定性。
9.作为本实用新型的进一步改进,规格板件分拣模块包括规格板件分拣机架、多根规格板件输送辊和规格板件驱动装置,规格板件输送辊的两端转动设置于规格板件分拣机架上,规格板件驱动装置用于驱动规格板件输送辊转动,相邻两根规格板件输送辊中心线的距离为d,规格板件在规格板件分拣架长度方向的长度为l,其中l大于或等于2d,并且l和d都是大于零的实数。本实用新型中的规格板件在规格板件分拣模块上输送的过程中,至少有两根规格板件输送辊支撑,避免规格板件在输送过程中,存在只有一根规格板件输送辊支撑而使规格板件一端向上或者向下倾斜,导致规格板件输送被格规板件输送辊所阻的问题。
10.作为本实用新型的进一步改进,两个板材下料模块间设置有地轨,地轨与板材下料模块平行,机器人分拣装置设置在地轨上并且可在地轨上沿地轨的长度方向移动。本实用新型设置地轨,机器人分拣装置在地轨上移动,提高机器人分拣装置吸取与放置规格板件和异形板件的范围。
11.本实用新型的另一个目的是提供一种板材分拣方法,解决现有技术的板材分拣中由于异形板材无处放置被打碎而致板材利用率低的技术缺陷。
12.为解决上述问题,本实用新型所采取的技术方案是:板材分拣方法,采用可提高板材利用率的分拣系统,板材加工模块加工板材,正被加工的板材在板材加工模块上输送的同时,将加工完的板材推动到板材下料模块上,机器人分拣装置将板材下料模块上用于后续加工的规格板件放置在规格板件分拣模块上,由规格板件分拣装置输送至下一加工工序处,机器人分拣装置将板材下料模块上的异形板件放置在异形板件分拣模块上,异形板件被收集后留作它用。本实用新型将板材加工产生的异形板件采用机器人分拣装置放置在异形板件分拣模块上,而不是如现有技术一样在板材加工时将异形板件打碎,本实用新型中
异形板件分拣模块上收集的异形板件可在其它位置使用,由此提高板材的利用率。
13.作为本实用新型的进一步改进,在板材后续加工工序发生故障时,规格板件分拣模块处的升降台升起至高于规格板件分拣模块,机器人分拣装置将规格板件放置在升降台上,后续加工工序故障排除后,再将升降台上的规格板件逐一放置在规格板件分拣模块上输送,升降台上的规格板件全部放置在规格板件分拣模块上以后,升降台向下降至低于规格板件分拣模块。本实用新型在规格板件的后续加工工序出现故障时,不影响前面板材的加工,前面的板材加工模块可继续对板材进行加工产生规格板件和异形板件,避免板材加工全面停机而导致的板材加工效率的大幅降低。
14.作为本实用新型的更进一步改进,在机器人分拣装置吸取的异形板件较大时,先将较大的异形板件放置在托架上,在机器人分拣装置吸取小的异形板件码平异形板件分拣模块后,再将较大的异形板件放置在被码平的异形板件分拣模块上。本实用新型通过将较大的异形板材暂时放置在托架上,使异形板材分拣模块上由较小的异形板材码平后再将较大的异形板材向上码放在异形板件模块上的异形板件上,避免由于较大的板材部分悬空,尤其是边沿处悬空,以致异形板件悬放稳定性差,容易在后续转移中倾倒发生危险的问题,提高异形板件码放和转移的安全性。
15.综上所述,本实用新型的有益效果是:本实用新型设置有异形板件分拣模块专门用于放置板材加工成规格板件后剩余的异形板件,将异形板件收集后,用在其它仅需要较小板材的部位,相较于现有技术板材加工过程直接将异形板材打碎的处理方式,本实用新型极大的提高了板材的利用率,也避免由于打碎异形板材而产生的木质粉尘以及能量浪费,提高板材加工的经济性。
附图说明
16.图1是本实用新型的俯视图。
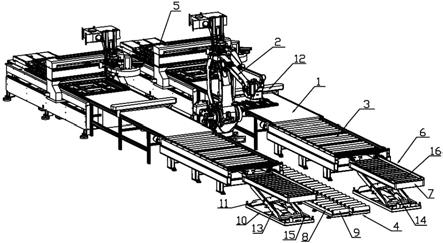
17.图2是本实用新型的立体结构示意图。
18.其中:1、板材下料模块;2、机器人分拣装置;3、异形板件分拣模块;4、规格板件分拣模块;5、板材加工模块;6、升降台;7、上支架单元;8、规格板件分拣机架;9、规格板件输送辊;10、下支架单元;11、第一连接杆;12、ccd检测模块;13、第二连接杆;14、升降气缸;15、下滚轮;16、支撑辊。
具体实施方式
19.下面结合附图对本实用新型的具体实施方式做进一步的说明。
20.实施例1
21.本实施例的技术方案系一种可提高板材利用率的分拣系统,如图1和图2所示,该可提高板材利用率的分拣系统包括板材下料模块1、机器人分拣装置2、异形板件分拣模块3和规格板件分拣模块4;板材下料模块1在使用状态下位于板材加工模块5板材输出的一端,用于接收板材加工模块5加工后的板材,本实施例中的板材加工模块5系现有技术,用于对板材的裁板、贴标、铣型等加工,本实施例不予详述,机器人分拣装置2采用机械手,机械手上设置有多个吸盘,通过机械手上的吸盘吸取板材,用于将板材下料模块1上的异形板件和规格板件分别放置于异形板件分拣模块3和规格板件分拣模块4上,规格板件分拣模块4用
于将规格板件输送至指定位置,异形板件分拣模块3用于收集异形板件。本实施例中的板材下料模块1包括板材下料机架和板材下料支撑板,板材下料支撑板呈水平状态并且设置在板材下料机架上由板材下料机架支撑,本实施例中板材下料支撑板的上表面与板材加工模块5用于支撑板材的表面位于同一水平面上,板材加工模块5在加工板材时,板材在板材加工模块5上被向前输送,后面的板材将前面已经被加工过的材板向前推动,把前面的板材推到板材下料模块1的板材下料支撑板上,板材加工模块5在加工过程中不向前输送板材,此时板材下料模块1上的规格板件和异形板件相对静止,不再被向前推动。本实施例在板材下料模块1上设置有ccd检测模块12,ccd检测模块12位于板材下料模块1的上方,并且ccd检测模块12的两端通过支撑柱设置在板材下料模块1的两侧,经板材加工模块5加工后得到的规格板件和异形板件在板材下料模块1上移动时,从ccd检测模块12的下方通过,ccd检测模块12对其进行信息扫描和质量评估,机器人分拣装置2根据上述检测结果对规格板件和异形板件进行分拣,本实施例在ccd检测模块12上安装扫描器,通过对板材加工模块5贴在板材上的标签或者二维码进行扫描,以完成对板材信息的读取以及板材质量的评估,ccd检测模块12将扫描数据输送给机器人分拣装置2,使机器人分拣装置2对板材下料模块1上的规格板件和异形板件进行精确定位以及质量筛选,以将规格板件和异形板件分别放置在规格板件分拣模块4和异形板件分拣模块3上,本实施例中ccd检测模块12及其将扫描数据输送给机器人分拣装置2的实现方式均系现有技术,本实施例不予详述。
22.本实施例中的板材下料模块1和异形板件分拣模块3的数量优选的均设置为两个,规格板件分拣模块4的数量为一个以上,当规格板件分拣模块4的数量超过一个时,规格板件分拣模块4平行设置,两个板材下料模块1平行设置,在使用状态下两个板材下料模块1分别用于接收两个板材加工模块5加工后的板材,机器人分拣装置2位于两个板材下料模块1之间,两个异形板件分拣模块3分别位于规格板件分拣模块4的两侧,在使用时,机器人分拣装置2从两个板材下料模块1上吸取规格板件放置在规格板件分拣模块4上,由规格板件分拣模块4输送至后续的板材封边加工工序处,机器人分拣装置2吸取板材下料模块1上的异形板件,并放置在异形板件分拣模块3上,实现异形板件的收集,以作它用,减少板材的浪费,提高板材的利用率,本实施例中位于机器人分拣装置2同一侧的板材加工模块5、板材下料模块1和异形板件分拣模块3位于同一直线上。
23.实施例2
24.本实施例是在实施例1的基础上所做的进一步的改进,与实施例1相比,本实施例中的规格板件分拣模块4处设置有升降台6,升降台6升起时,机器人分拣装置2将下料模块上的规格板放置在升降台6上。本实施例中的升降台6包括两个升降单元,两个升降单元分别位于规格板件分拣模块4的两侧,本实施例中的升降单元包括升降架、升降驱动装置和多根支撑辊16,升降架包括上支架单元7、下支架单元10和两个用于连接上支架单元7和下支架单元10的连接件,本实施例中的支撑辊16的两端转动设置在上支架单元7上,连接件包括两根中部铰接呈x状的第一连接杆11和第二连接杆13,第一连接杆11的一端与下支架单元10的一端铰接,第一连接杆11的另一端与上支架单元7铰接,第二连接杆13的顶端和底端分别转动设置有上滚轮(图中未示出)和下滚轮15,上滚轮和下滚轮15分别与上支架单元7和下支架单元10抵接,本实施例中升降驱动装置优选的采用两个活塞杆同步伸长和收缩的升降气缸14,升降气缸14的缸体转动安装在下支架单元10上,升降气缸14的活塞杆分别与两
个第二连接杆13的上部铰接,升降气缸14的活塞杆伸长或者收缩驱动第二连接杆13相对第一连接杆11转动,并且带动第一连接杆11相对上支架单元7和下支架单元10转动,以使上支架单元7垂直移动,在第二连接杆13转动的同时,上滚轮和下滚轮15分别相对上支架单元7和下支架单元10滚动,本实施例在后续封边工序发生故障时,两个升降单元向上升起,机器人分拣装置2吸取规格板件放置在升降台6上,此时规格板件分拣模块4停止运行,后面的工序停止,而前面对板材的加工的工序可继续进行,在后续封边工序故障排除后,再将升降台6上的规格板件逐一放置在规格板件分拣模块4上向封边工序输送。
25.本实施例优选的将规格板件分拣模块4的数量为两个,两个规格板件分拣模块4平行设置,升降台6的数量也是两个,两个升降台6分别位于规格板件分拣模块4的两侧,并且两个规格板件分拣模块4分别位于两个异形板件分拣模块3有前方。本实施例中其余部分的结构与实施例1相同,具体可参考实施例1,本实施例不予赘述。
26.实施例3
27.本实施例系在实施例2的基础上所做的进一步的改进,相较于实施例2,本实施例在异形板件分拣模块3上设置有托架(图中未示出),本实施例中托架的长度小于异形板件分拣模块3的长度,托架包括两个托架单元,两个托架单元的底端分别设置在异形板件分拣模块3的两侧,用于支撑体积较大的异形板件。本实施例在使用时,当异形板件分拣模块3上码放的异形板件剩余的空间不足以再放置一块大的异形板件,需要将较大的异形板件向上叠放时,先将较大的异形板件放置在托架上,由异形板件分拣模块3两侧的托架单元支撑,待较小的异形板件在异形板件分拣模块3上码平后,再将较大的异形板件放置在异形板件分拣模块3上,避免较大的异形板件底部悬空而稳定性差。本实施例中其余部分的结构与实施例2相同,具体可参考实施例2,本实施例不予赘述。
28.实施例4
29.本实施例是在实施例3的基础上所做的进一步改进,与实施例3相比,本实施例中的规格板件分拣模块4包括规格板件分拣机架8、多根规格板件输送辊9和规格板件驱动装置,规格板件输送辊9的两端转动设置于规格板件分拣机架8上,规格板件驱动装置用于驱动规格板件输送辊9转动,相邻两根规格板件输送辊9中心线的距离为d,规格板件在规格板件分拣架长度方向的长度为l,其中l大于或等于2d,并且d和l都是大于零的实数,本实施例优选的将d设置为小于l的一半,即l>2d,本实施例中每个规格板件至少有两根规格板件输送辊9支撑,在规格板件的输送过种中,不会发生在某位置处规格板件由于仅一根规格板件输送辊9支撑而端部向上或者向下倾斜,影响规格板件的输送的问题,本实施例中的规格板件输送辊9的一端采用链条连接,本实施例中的规格板件驱动装置优选的采用安装在规格板件分拣机架8上的规格板件驱动电机,另一端采用链条与规格板件驱动电机的输出轴连接,以采用一台规格板件驱动电机驱动所有的规格板件输送辊9转动。本实施例中其余部分的结构与实施例3相同,具体可参考实施例3,本实施例不予赘述。
30.实施例5
31.本实施例是在实施例4的基础上的进一步改进,本实施例相较于实施例4,在两个板材下料模块1间设置有地轨,本实施例中的地轨在使用状态下采用螺栓等可拆卸的安装在地面上,其中地轨包括两条平行的地轨单元,左右两根地轨单元与左右两个板材下料模块1之间的距离相等,并且地轨与板材下料模块1平行,即地轨的长度方向与板材下料模块1
的长度方向相同,机器人分拣装置2设置在地轨上并且可在地轨上沿地轨的长度方向移动,本实施例中机器人分拣装置2在地轨上滑动的结构以及机器人分拣装置2在地轨上移动的驱动结构均系现有技术,本实施例不予详述。本实施例中机器人分拣装置2可根据规格板件以及异形板件在板材下料模块1上的位置以及将要放置在规格板件分拣装置4和异形板件分拣装置3上的放置位置而在地轨上移动。本实施例中其余部分的结构与实施例4相同,具体可参考实施例4,本实施例不予赘述。
32.实施例6
33.本实施例系的技术方案系板材分拣方法,本实施例利用实施例5的可提高板材利用率的分拣系统,板材加工模块5加工板材,正被加工的板材在板材加工模块5上输送的同时,将加工完的板材推动到板材下料模块1上,机器人分拣装置2将板材下料模块1上用于后续加工的规格板件放置在规格板件分拣模块4上,由规格板件分拣装置输送至下一加工工序处,机器人分拣装置2将板材下料模块1上的异形板件放置在异形板件分拣模块3上,异形板件被收集后留作它用,其中机器人分拣装置2在吸取靠近板材下料模块1处的规格板件和异形板件前,先沿地轨朝着板材下料模块的方向移动,在吸取规格板件后,再朝着远离板材下料模块1的方向移动,并将规格板件放置在规格板件分拣模块4上,或者在吸取异形板件后,再朝远离板材下料模块1的方向移动,将异形板件放置在异形板件分拣模块3上;而在远离板材下料模块1处,机器人分拣装置2吸取规格板件后可直接放置在规格板件分拣模块4上,吸取异形板件后直接放置在异形板件分拣模块3上,而无需沿着地轨移动。
34.实施例7
35.本实施例是对实施例6的进一步改进,相较于实施例6,本实施例在板材后续加工工序发生故障时,规格板件分拣模块4处的升降台6升起至高于规格板件分拣模块4,机器人分拣装置2将规格板件放置在升降台6上,后续加工工序故障排除后,再由机器人分拣装置2将升降台6上的规格板件逐一放置在规格板件分拣模块4上输送,待升降台6上的规格板件全部放置在规格板件分拣模块4上以后,升降台6向下降至低于规格板件分拣模块4,机器人分拣装置2再将从板材下料模块1上吸取的规格板件放置在规格板件分拣模块4上向封边加工工序处输送。本实施例中其余部分的结构与实施例6相同,具体可参考实施例6,本实施例不予赘述。
36.实施例8
37.本实施例是对实施例7的进一步改进,与实施例7相比,本实施例在机器人分拣装置2吸取的异形板件较大时,先将较大的异形板件放置在托架上,在机器人分拣装置2吸取小的异形板件码平异形板件分拣模块3后,再将较大的异形板件向上叠放在被码平的异形板件分拣模块3上,在异形板件分拣模块3上放置的异板材厚度达到一定数值时,再将异形板件移走,用于制作诸如门板上的装饰条等。本实施例中其余部分的结构与实施例7相同,具体可参考实施例7,本实施例不予赘述。
38.以上说明书中未做特别说明的部分均为现有技术,或者通过现有技术即能实现。而且本实用新型中所述具体实施案例仅为本实用新型的较佳实施案例而已,并非用来限定本实用新型的实施范围。即凡依本实用新型专利范围的内容所作的等效变化与修饰,都应作为本实用新型的技术范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1