基于视觉识别的分拣机械手的制作方法
1.本实用新型涉及机械手的技术领域,特别是涉及一种基于视觉识别的分拣机械手。
背景技术:
2.分拣是将物品按品种、出入库先后顺序进行分门别类地堆放的作业。分拣是完善送货、支持送货的准备性工作,是不同配送企业在送货时竞争和提高自身经济效益的必然延伸。所以,也可以说分拣是送货向高级形式发展的必然要求。
3.现有分拣设备上安装的机械手只有抓取的功能,机械手自动贴靠箱体实现夹紧,但是由于现有的机械手不能进行角度调节,从而会使机械手对箱体夹紧时导致箱体的受力不均,从而使箱体损坏,而且现有的机械手对箱体进行固定夹紧,其不便对箱体进行扫码识别进行分拣。
技术实现要素:
4.为解决上述技术问题,本实用新型提供一种便于调节装夹装置的角度,从而可以对堆积成不同角度的箱体进行装夹,不会造成箱体损坏,而且对箱体进行夹紧后,可以带动箱体转动,使箱体上的码与分拣装置对应,从而便于对箱体进行扫码识别进行分拣的基于视觉识别的分拣机械手。
5.本实用新型的基于视觉识别的分拣机械手,包括连接杆、连接块、三组第一电机、三组第一齿轮、三组第二齿轮、三组第一转轴、三组固定架、三组第一连杆、三组第二连杆、三组第一连接球、三组连接座、第一移动板、第三连杆、第二连接球、装夹装置和分拣装置,连接杆安装在分拣设备上,连接块安装在连接杆底端,连接块内均等设置有操作槽,三组第一电机分别安装在三组操作槽内,三组第一齿轮分别安装在三组第一电机输出端,三组第一齿轮分别与三组第二齿轮相啮合,三组第二齿轮分别安装在三组第一转轴上,三组第一转轴通过三组固定架可转动安装在连接块外端,三组第一连杆分别安装在三组第一转轴上,三组第一连杆外端与三组第二连杆顶端可转动连接,三组第一连接球分别安装在三组第二连杆底端,三组第一连接球与三组连接座可转动连接,三组连接座安装在第一移动板顶端,第三连杆底端与连接块底端连接,第二连接球安装在第三连杆底端,第二连接球与第一移动板顶端可转动连接,装夹装置安装在第一移动板底端,分拣装置安装在装夹装置上。
6.本实用新型的基于视觉识别的分拣机械手,装夹装置包括螺杆、第二电机、两组第二移动板、两组第二转轴、两组夹紧板和驱动,第一移动板底端设置有滑槽,螺杆可转动安装在滑槽内部,第二电机安装在第一移动板右端,第二电机输出端穿过第一移动板右端与螺杆右端连接,两组第二移动板顶端在滑槽内滑动,两组第二移动板与螺杆螺纹连接,两组第二转轴分别可转动安装在两组第二移动板内端下侧,两组夹紧板分别安装在两组第二转轴内端,驱动安装在左侧第二移动板左端的下侧,驱动输出端穿过左侧第二移动板与左侧第二转轴左端连接,分拣装置安装在滑槽内中部,分拣装置与螺杆可转动连接。
7.本实用新型的基于视觉识别的分拣机械手,分拣装置包括固定块和摄像头,固定块安装在滑槽内中部,固定块与螺杆可转动连接,摄像头安装在固定块底端。
8.本实用新型的基于视觉识别的分拣机械手,还包括两组加强筋,两组加强筋内端与第三连杆外端连接,两组加强筋顶端均与连接块底端连接。
9.本实用新型的基于视觉识别的分拣机械手,还包括保护罩,保护罩安装在左侧第二移动板左端下部,保护罩位于驱动外侧。
10.本实用新型的基于视觉识别的分拣机械手,还包括检修门,保护罩左端连通设置有检修口,检修门可转动安装在检修口处。
11.本实用新型的基于视觉识别的分拣机械手,还包括检修把手,检修把手安装在检修门左端上侧。
12.本实用新型的基于视觉识别的分拣机械手,所述夹紧板内侧设置有防滑垫。
13.与现有技术相比本实用新型的有益效果为:根据箱体的摆放角度来启动三组第一电机,三组第一齿轮则与三组第二齿轮啮合,三组第二齿轮则带动三组第一转轴转动,三组第一转轴则带动三组第一连杆转动,三组第一连杆则带动三组第二连杆转动,三组第二连杆则通过三组第一连接球和三组连接座来调节第一移动板的角度,第一移动板底端的装夹装置与箱体的倾斜角度一致时,关闭三组第一电机,然后打开装夹装置,装夹装置对箱体进行夹紧,然后装夹装置带动箱体转动,使箱体的码与分拣装置位置对应,之后分拣装置对箱体进行扫码,然后分拣设备带动连接块整体运动来对箱体进行分拣,通过设置此设备,便于调节装夹装置的角度,从而可以对堆积成不同角度的箱体进行装夹,不会造成箱体损坏,而且对箱体进行夹紧后,可以带动箱体转动,使箱体上的码与分拣装置对应,从而便于对箱体进行扫码识别进行分拣。
附图说明
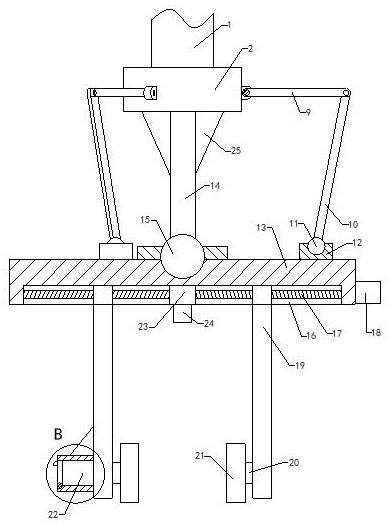
14.图1是本实用新型的结构示意图;
15.图2是图1中连接块的仰视放大结构示意图;
16.图3是图2中a的放大结构示意图;
17.图4是图1中b的放大结构示意图;
18.附图中标记:1、连接杆;2、连接块;3、第一电机;4、第一齿轮;5、第二齿轮;6、第一转轴;8、固定架;9、第一连杆;10、第二连杆;11、第一连接球;12、连接座;13、第一移动板;14、第三连杆;15、第二连接球;16、滑槽;17、螺杆;18、第二电机;19、第二移动板;20、第二转轴;21、夹紧板;22、驱动;23、固定块;24、摄像头;25、加强筋;26、保护罩;27、检修门;28、检修把手。
具体实施方式
19.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
20.如图1至图4所示,本实用新型的基于视觉识别的分拣机械手,包括连接杆1、连接块2、三组第一电机3、三组第一齿轮4、三组第二齿轮5、三组第一转轴6、三组固定架8、三组第一连杆9、三组第二连杆10、三组第一连接球11、三组连接座12、第一移动板13、第三连杆
14、第二连接球15、装夹装置和分拣装置,连接杆1安装在分拣设备上,连接块2安装在连接杆1底端,连接块2内均等设置有操作槽,三组第一电机3分别安装在三组操作槽内,三组第一齿轮4分别安装在三组第一电机3输出端,三组第一齿轮4分别与三组第二齿轮5相啮合,三组第二齿轮5分别安装在三组第一转轴6上,三组第一转轴6通过三组固定架8可转动安装在连接块2外端,三组第一连杆9分别安装在三组第一转轴6上,三组第一连杆9外端与三组第二连杆10顶端可转动连接,三组第一连接球11分别安装在三组第二连杆10底端,三组第一连接球11与三组连接座12可转动连接,三组连接座12安装在第一移动板13顶端,第三连杆14底端与连接块2底端连接,第二连接球15安装在第三连杆14底端,第二连接球15与第一移动板13顶端可转动连接,装夹装置安装在第一移动板13底端,分拣装置安装在装夹装置上;根据箱体的摆放角度来启动三组第一电机3,三组第一齿轮4则与三组第二齿轮5啮合,三组第二齿轮5则带动三组第一转轴6转动,三组第一转轴6则带动三组第一连杆9转动,三组第一连杆9则带动三组第二连杆10转动,三组第二连杆10则通过三组第一连接球11和三组连接座12来调节第一移动板13的角度,第一移动板13底端的装夹装置与箱体的倾斜角度一致时,关闭三组第一电机3,然后打开装夹装置,装夹装置对箱体进行夹紧,然后装夹装置带动箱体转动,使箱体的码与分拣装置位置对应,之后分拣装置对箱体进行扫码,然后分拣设备带动连接块2整体运动来对箱体进行分拣,通过设置此设备,便于调节装夹装置的角度,从而可以对堆积成不同角度的箱体进行装夹,不会造成箱体损坏,而且对箱体进行夹紧后,可以带动箱体转动,使箱体上的码与分拣装置对应,从而便于对箱体进行扫码识别进行分拣。
21.本实用新型的基于视觉识别的分拣机械手,装夹装置包括螺杆17、第二电机18、两组第二移动板19、两组第二转轴20、两组夹紧板21和驱动22,第一移动板13底端设置有滑槽16,螺杆17可转动安装在滑槽16内部,第二电机18安装在第一移动板13右端,第二电机18输出端穿过第一移动板13右端与螺杆17右端连接,两组第二移动板19顶端在滑槽16内滑动,两组第二移动板19与螺杆17螺纹连接,两组第二转轴20分别可转动安装在两组第二移动板19内端下侧,两组夹紧板21分别安装在两组第二转轴20内端,驱动22安装在左侧第二移动板19左端的下侧,驱动22输出端穿过左侧第二移动板19与左侧第二转轴20左端连接,分拣装置安装在滑槽16内中部,分拣装置与螺杆17可转动连接;通过打开第二电机18,螺杆17则与两组第二移动板19螺纹连接,两组第二移动板19则在滑槽16内滑动,同时两组第二移动板19通过两组第二转轴20带动两组夹紧板21向内运动,当两组夹紧板21对箱体进行夹紧后,关闭第二电机18,然后打开驱动22,驱动22则带动左侧第二转轴20转动,左侧第二转轴20则带动左侧夹紧板21转动,左侧夹紧板21则带动箱体转动,当箱体上的码朝上与分拣装置位置对应后,关闭驱动22,起对箱体进行夹紧的关键作用。
22.本实用新型的基于视觉识别的分拣机械手,分拣装置包括固定块23和摄像头24,固定块23安装在滑槽16内中部,固定块23与螺杆17可转动连接,摄像头24安装在固定块23底端;通过设置固定块23和摄像头24,摄像头24则对箱体进行扫码识别进行分拣,起对箱体进行分拣的关键作用。
23.本实用新型的基于视觉识别的分拣机械手,还包括两组加强筋25,两组加强筋25内端与第三连杆14外端连接,两组加强筋25顶端均与连接块2底端连接;通过设置加强筋25,可以起对第三连杆14支撑加固的作用。
24.本实用新型的基于视觉识别的分拣机械手,还包括保护罩26,保护罩26安装在左侧第二移动板19左端下部,保护罩26位于驱动22外侧;通过设置保护罩26,可以起对驱动22保护的作用。
25.本实用新型的基于视觉识别的分拣机械手,还包括检修门27,保护罩26左端连通设置有检修口,检修门27可转动安装在检修口处;通过设置检修门27,便于对驱动22进行检修和保养。
26.本实用新型的基于视觉识别的分拣机械手,还包括检修把手28,检修把手28安装在检修门27左端上侧;通过设置检修把手28,便于对检修门27进行打开和关闭。
27.本实用新型的基于视觉识别的分拣机械手,所述夹紧板21内侧设置有防滑垫;可以增大夹紧板21与箱体的摩擦力,从而起防滑的作用。
28.本实用新型的基于视觉识别的分拣机械手,其在工作时,首先根据箱体的摆放角度来启动三组第一电机3,三组第一齿轮4则与三组第二齿轮5啮合,三组第二齿轮5则带动三组第一转轴6转动,三组第一转轴6则带动三组第一连杆9转动,三组第一连杆9则带动三组第二连杆10转动,三组第二连杆10则通过三组第一连接球11和三组连接座12来调节第一移动板13的角度,当两组夹紧板21与箱体的倾斜角度一致时,关闭三组第一电机3,然后打开第二电机18,螺杆17则与两组第二移动板19螺纹连接,两组第二移动板19则在滑槽16内滑动,同时两组第二移动板19通过两组第二转轴20带动两组夹紧板21向内运动,当两组夹紧板21对箱体进行夹紧后,关闭第二电机18,然后打开驱动22,驱动22则带动左侧第二转轴20转动,左侧第二转轴20则带动左侧夹紧板21转动,左侧夹紧板21则带动箱体转动,当箱体上的码朝上与摄像头24位置对应后,关闭驱动22,之后使摄像头24对箱体进行扫码识别,然后分拣设备带动连接块2整体运动来对箱体进行分拣即可。
29.本实用新型的基于视觉识别的分拣机械手,其安装方式、连接方式或设置方式均为常见机械方式,只要能够达成其有益效果的均可进行实施;本实用新型的基于视觉识别的分拣机械手的第一电机3、第二电机18、驱动22和摄像头24为市面上采购,本行业内技术人员只需按照其附带的使用说明书进行安装和操作即可。
30.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1