一种深部巷道围岩紧密裂隙人工驱动增透注浆系统及方法与流程
[0001]
本发明属于地下工程增透注浆施工技术领域,具体涉及一种深部巷道围岩紧密裂隙人工驱动增透注浆系统及方法。
背景技术:
[0002]
开挖后深部巷道围岩的破坏和失稳,通常是由于岩石开挖卸载后应力状态改变诱导裂隙发展引起的。由于地质构造的复杂和其他诸多因素,巷道岩体开挖中会存在着许多不同程度的紧密裂隙。紧密裂隙的存在严重影响围岩的稳定性,深部巷道围岩裂隙注浆过程中存在着紧密裂隙注浆困难的问题。
[0003]
申请号为cn201910783182.7的中国发明专利公开了临坡面岩体竖向裂隙注浆设计方法,其根据岩体竖向裂隙注浆模型,拟合建立裂隙开度、单孔注浆量与最大膨胀压力之间的关系以及裂隙开度、单孔注浆量与扩散范围之间的关系;获取实际临坡面岩体的竖向裂隙和岩体的几何尺寸和实际岩体竖向裂隙面允许承受的最大膨胀压力;根据裂隙开度、单孔注浆量与最大膨胀压力之间的关系,计算出单孔注浆量、注浆孔数以及注浆孔间距。该方法仅期望降低岩体竖向裂隙充填注浆的主观性,控制注浆操作。
[0004]
针对目前深部巷道围岩紧密裂隙注浆困难的工程实际问题,有必要提出一种新的施工方法,使其能够简化增透过程,实现对深部巷道围岩紧密裂隙的注浆,同时为增透注浆施工提供理论支撑。
技术实现要素:
[0005]
本发明针对深部巷道围岩紧密裂隙注浆困难的问题,提供一种方便快捷的、裂隙可监测的深部巷道围岩紧密裂隙人工驱动增透注浆系统及方法。本发明利用剪切激励的原理,增大裂隙开度,从而达到深部巷道围岩增透注浆的目的。
[0006]
为了实现上述目的,本发明是通过如下的技术方案来实现:一种深部巷道围岩紧密裂隙人工驱动增透注浆系统,其包括由手拉葫芦、锚杆和链条组成的激励单元、注浆单元和监测单元,所述激励单元设置在紧密裂隙的外围,所述注浆单元与所述紧密裂隙连通,所述监测单元与所述激励单元和所述紧密裂隙连接。
[0007]
优选的,所述链条区分为起重链条、手链条、传力锁链、牵引锁链,与所述手拉葫芦、所述锚杆连接。
[0008]
优选的,所述锚杆设置多个,其位置关系呈等腰三角形。
[0009]
优选的,所述激励单元设置2个,分布于所述紧密裂缝的两侧。
[0010]
优选的,所述监测单元包括位移计、传感器、控制面板、服务器,所述位移计设置在所述紧密裂缝的两侧,所述传感器与所述注浆单元连接,所述位移计、所述传感器、所述控制面板、所述服务器之间电性连接。
[0011]
优选的,所述传感器包括裂隙位移传感器、注浆压力传感器,所述注浆压力传感器与所述注浆单元连接,所述裂隙位移传感器与所述位移计连接。
[0012]
优选的,所述注浆单元包括注浆设备及与其连接的注浆管,所述注浆管与所述紧密裂缝连通。
[0013]
作为本发明的另一方面,本发明提供一种利用深部巷道围岩紧密裂隙人工驱动增透注浆系进行注浆的方法,其包括以下步骤,(1)在紧密裂隙外侧将锚杆固定形成等腰三角形布局;(2)将传力锁链套入等腰三角形顶点处的锚杆,用扁平接链环或开口式连接环将牵引锁链一端与锚杆一侧的传力锁连)连接;(3)将手拉葫芦的起重链条与牵引锁链连接固定;(4)将紧密裂缝插入注浆管并密封,在紧密裂缝两侧安装位移计;(5)拉动手拉葫芦进行人工驱动增透施工,当裂隙张开达到0.7 mm后,注浆单元进行注浆。
[0014]
本发明的有益效果:1) 本发明中,利用手拉葫芦作为人工驱动剪切的设备,可以做到拆卸简易,施工方便,减少大型设备的使用,加快施工进度。
[0015]
2) 本发明中,将锚杆呈等腰三角形形状打入巷道围岩紧密裂隙两侧,利用三角形的稳定性,保证了在增透过程中,裂隙周围岩体的稳定性,防止发生二次破坏。
[0016]
3)本发明中,位移监测单元和注浆单元中都包含传感器,可以监测扩缝注浆过程中的位移和压力,最终确定和优化注浆时机、注浆压力等注浆参数,为现场增透注浆施工提供理论支撑,具有指导意义。
附图说明
[0017]
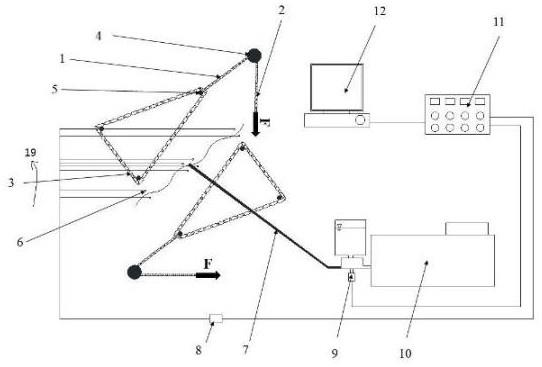
图1是本发明的系统示意图;图2是本发明的系统装置示意图;图3是本发明所述的高强锁链的安装示意图;图4为增透原理受力分析图,其中左边线条为紧密裂隙的示意,右边为经过增透后裂缝的开裂状态,圈出的地方可以明显看到裂隙上下两侧面的缝隙变化;图5为作业时激励单元的受力分析图;图6为不同粗糙度和倾角的紧密裂缝示例;附图标记说明:18-激励单元:1-起重链条,2-手链条,3-牵引锁链,4-手拉葫芦,5-锚杆,13-传力锁链,19-链条;14-注浆单元:10-注浆设备,7-注浆管;16-监测单元:11-控制面板,12-服务器,6-位移计,15-传感器,8-裂隙位移传感器,9-注浆压力传感器。
具体实施方式
[0018]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图对本发明的具体实施方式做详细的说明。
[0019]
术语解释部分:本发明中所述的“高强锁链”,“高强锚杆”等中的“高强”是指只要锁链和锚杆等的强度可以承受现场施工所需的最大压力即可。
[0020]
实施例1如图1-2所示,本实施例提供一种深部巷道围岩紧密裂隙人工驱动增透注浆系统,其包
括由手拉葫芦4、锚杆5和链条19组成的激励单元18、注浆单元14和监测单元16,激励单元18设置在紧密裂隙的外围,注浆单元14与紧密裂隙连通,监测单元16与激励单元18和紧密裂隙连接。本实施例中的系统是用于对围岩增透注浆而设计的,将锚杆5打入围岩后安装手拉葫芦4和链条19,完成后可以人工驱动手拉葫芦4使紧密裂缝发生错动进而实现增透,当监测单元16提示裂隙增透到可以注入浆液的程度,控制注浆单元14对裂隙注水泥浆液。较好的,激励单元18设置至少2个,分布于紧密裂缝的两侧,利于对裂缝进行双向牵引。
[0021]
进一步的,链条19区分为起重链条1、手链条2、传力锁链13、牵引锁链3,与手拉葫芦4、锚杆5连接。锚杆5采用管缝式锚杆,将管缝式锚杆呈等腰三角形打入紧密裂隙两侧,再将高强锁链3套到锚杆5上拉紧,等腰三角形布设的目的在于使牵引力分布范围增大,防止围岩局部破坏。高强锁链3在每个锚杆5背向滑移方向的面都有传力锁链13,保证链条19在牵引过程中呈三角形分布的三根锚杆都可以受到牵引力。较好的,人工拉动手拉葫芦4的手链条2,从而牵引锚杆5沿裂隙方向发生剪切滑移,达到增透的目的。手拉葫芦4用于人工驱动进行双向扩缝,人工驱动增透过程中当紧密裂隙张开达到0.7 mm后可以开始注浆,优选设置2个大吨位手拉葫芦,分别设置在以远离牵引方向的锚杆为顶点的等腰三角形的中线的延长线上,手拉葫芦4安装好后,将手拉葫芦的高强起重链条1固定到牵引锚杆5的高强锁链3的底边中点处。
[0022]
进一步的,监测单元16包括位移计6、传感器15、控制面板11、服务器12,位移计6设置在紧密裂缝的两侧,传感器15与注浆单元14连接,位移计6、传感器15、控制面板11、服务器12之间电性连接。较佳的,传感器15包括裂隙位移传感器8、注浆压力传感器9,注浆压力传感器9与注浆单元14连接,裂隙位移传感器8与位移计6连接,位移传感器8,注浆系统的压力传感器9均连接于服务器12,以便于服务器12收集并分析数据,服务器12收集到的数据,可以用来做理论分析,最终确定和优化注浆时机、注浆压力等注浆参数。控制面板11包括plc以及由plc引出的开关按钮。
[0023]
进一步的,注浆单元14包括注浆设备10及与其连接的注浆管7,注浆管7与紧密裂缝连通。注浆设备10优选为注浆泵,注浆泵连通用于存储注浆液的容器。
[0024]
裂隙的存在严重影响围岩的稳定性,巷道围岩裂隙注浆过程中存在着裂隙空间小注浆困难的问题。该系统以剪切激励原理为理论支撑,隧道开挖后拓展贯通形成的宏观裂隙在三维应力状态下,深部巷道围岩紧密裂隙的上下两侧呈紧密贴合状态,裂隙具有波浪走势,沿裂隙方向存在剪切趋势。当经过激励力发生位移后,裂隙的上下两侧出现错动,裂隙张势程度扩大进而实现增透,可利于注浆操作。但是对深部巷道围岩紧密裂隙施力,需要严格的控制,兼顾岩体的稳定性,防止发生二次破坏。本发明利用手拉葫芦,沿裂隙剪切趋势方向给裂隙一定的激励力,起到激励裂隙发生剪切滑移的作用,由于裂隙表面粗糙,滑动过程中裂隙会产生法向位移,增大裂隙开度,从而达到增透的目的。本发明利用剪切激励的原理,进行人工驱动,对紧密裂隙人工增透,增透后注浆,能够有效解决,深部巷道围岩开挖后紧密裂隙开度小,注浆困难的难题,并且施工便捷、耗时少、便于维修更换,同时能够做到裂隙增透发育过程可监测化,最终确定和优化注浆时机、注浆压力等注浆参数。
[0025]
实施例2如图1~6所示,本实施例提供一种利用实施例1的系统进行注浆的方法,该方法包括以下步骤,
(1)将锚杆5固定在紧密裂隙外侧,形成2个等腰三角形布局,紧密裂隙处于两个等腰三角形的中间位置,等腰三角形的底边与裂缝是近似垂直的分布;(2)将传力锁链13套入等腰三角形顶点处的锚杆5,用扁平接链环或开口式连接环将牵引锁链3一端与锚杆5一侧的传力锁连13连接;(3)将手拉葫芦4固定,手拉葫芦4的起重链条1与牵引锁链3连接固定;(4)将紧密裂缝插入注浆管7并密封,在紧密裂缝两侧安装位移计6,最后安装位移计6,防止打孔安装对岩石的扰动对位移计6的监测准确性产生影响,(5)拉动手拉葫芦4进行人工驱动增透施工,当裂隙张开达到0.7 mm后,注浆单元14进行注浆。
[0026]
从图4的受力分析中可以观察到,锚杆5的受力将明显小于对手链条2的施力,另外,如果三角形底边不与裂隙垂直,则在裂隙方向上的分力会减小,增加裂隙错动的难度。当对牵引锁链3的另一端施加预紧力后,使三根锚杆5在锁链的作用下互紧,当被起重链条1拉动时三根锚杆以相同的速度移动,避免因为三根锚杆位移速度不同而对围岩产生二次破坏,优选的,手链条2方向(人力方向)与起重链条1的内侧夹角小于90
°
,对2个手拉葫芦4施力时应配合进行,根据紧密裂缝的实际情况处理。
[0027]
进一步的,该系统的手拉葫芦4还可以替换为电液伺服机构,以满足对位移速率、施加力的速率的精准控制。但是应用该系统无法与链条19进行直接的结合,需要额外的部件如传动杆等的配合,系统将更加繁杂,因此手拉葫芦4更加适合本系统。另外,电液伺服机构在作业时需要预先输入信号,命令电液伺服机构进行作业,而这需要建立在对不同角度、粗糙度、不同的紧密性的裂隙状况的预先了解的前提下进行,无法应对现场施工多变的情况,灵活应用性较差。
[0028]
本发明提供一种深部巷道围岩紧密裂隙人工驱动增透和注浆的现场施工方法,深部巷道围岩开挖后,临空面应力重分布诱发裂隙扩展贯通形成宏观破裂面,影响巷道围岩稳定性。针对紧密裂隙开度小,注浆困难的问题,该施工方法以剪切激励原理为理论支撑,利用紧密裂隙在三维应力状态下沿裂隙方向存在剪切趋势的工程实际,沿裂隙剪切趋势方向给裂隙一定的激励力,起到激励裂隙发生剪切滑移的作用,由于裂隙表面粗糙,滑动过程中裂隙会产生法向位移,增加裂隙开度,从而达到增透的目的,增透完成后注浆。本发明能够有效解决深部围岩巷道开挖后紧密裂隙开度小,注浆困难的难题,并且施工便捷、耗时少、便于维修更换,同时能够做到裂隙增透发育过程可监测化,最终确定和优化注浆时机、注浆压力等注浆参数。
[0029]
应说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1