盾构机相对于隧道轴线的姿态自动修正系统及方法与流程
1.本发明涉及盾构施工工程领域,特指一种盾构机相对于隧道轴线的姿态自动修正系统及方法。
背景技术:
2.盾构机施工的产品是隧道,而隧道的轴线控制是衡量隧道质量的重要指标,当一台盾构机没有铰接系统时,为了对盾构机的掘进轴线加以控制,现有的技术主要是在推进时控制推进油缸的压力,调节推进油缸的推进速度,从而达到调整整个盾构机姿态的目标。而当盾构机出现掘进轴线的偏差或者出现掘进轴线偏差的趋势时,需要对推进系统的各分区进行油压的调整,使盾构机机头的姿态达到需要的状态,以达到盾构机姿态转向的目的。而现有技术中依靠盾构司机调整盾构机分区的减压阀,从而调整盾构机内各个推进油缸的推力达到盾构机姿态修正的目的,该方式对盾构机姿态的修正误差大,导致盾构机的姿态调整效果无法预估。
技术实现要素:
3.本发明提供了一种盾构机相对于隧道轴线的姿态自动修正系统及方法,解决了现有技术中在盾构机难以准确地修正盾构机姿态的技术问题。
4.本发明的盾构机相对于隧道轴线的姿态自动修正系统,包括:
5.第一采集模块,用于实时采集盾构机位置、隧道轴线位置;
6.角度纠偏模块,包括:用于根据该盾构机位置和该隧道轴线位置确认出盾构机轴线偏离该隧道轴线位置的水平偏差角度和竖直偏差角度的偏差角度计算单元;用于控制盾构机根据该水平偏差角度执行水平方向偏转以及根据该竖直偏差角度执行竖直方向偏转的角度纠偏控制单元;
7.第二采集模块,用于实时采集盾构机的实际总推力;
8.推力纠偏模块,包括:用于将该实际总推力的实际水平总分力和实际竖直总分力分别与相应预设的目标水平总分力和目标竖直总分力进行比较并得到该实际总推力的修正量的推力修正单元;用于根据该修正量修正当前相应该实际总推力并控制盾构机进行推进的推进控制单元。
9.本发明盾构机相对于隧道轴线的姿态自动修正系统进一步改进在于,还包括自适应控制模块,用于收集第一采集模块和第二采集模块的数据信息,并根据该数据信息对该盾构机的实际推进姿态进行预估并形成对该水平偏差角度、竖直偏差角度和该修正量的调整策略,该自适应控制模块与该第一采集模块、该偏差角度计算单元和该推力修正单元建立双向数据连接。
10.本发明盾构机相对于隧道轴线的姿态自动修正系统进一步改进在于,该盾构机上设有用于实现该盾构机推进的多个油缸;
11.该第二采集模块,包括:一一对应采集多个油缸的实际推力的多个采集单元;用于
将多个油缸的实际推力合并成该实际总推力的合并计算单元;
12.该推进控制单元,包括:用于将该修正量根据各该油缸的位置拆分成多个分修正量,的差分计算单元;用于根据多个该分修正量一一对应地控制多个该油缸进行推进的油缸控制单元。
13.本发明还提供了一种盾构机相对于隧道轴线的姿态自动修正方法,包括如下步骤:
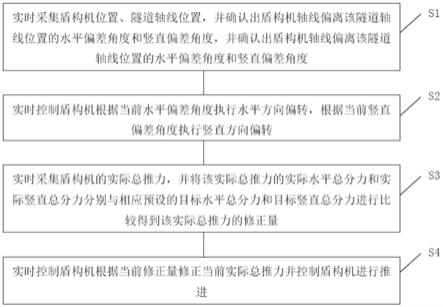
14.s1:实时采集盾构机位置、隧道轴线位置,并确认出盾构机轴线偏离该隧道轴线位置的水平偏差角度和竖直偏差角度;
15.s2:实时控制盾构机根据当前水平偏差角度执行水平方向偏转,根据当前竖直偏差角度执行竖直方向偏转;
16.s3:实时采集盾构机的实际总推力,并将该实际总推力的实际水平总分力和实际竖直总分力分别与相应预设的目标水平总分力和目标竖直总分力进行比较得到该实际总推力的修正量;
17.s4:实时控制盾构机根据当前修正量修正当前实际总推力并控制盾构机进行推进。
18.本发明盾构机相对于隧道轴线的姿态自动修正方法进一步改进在于,该盾构机上设有用于实现该盾构机推进的多个油缸;
19.在进行步骤s3时,分别实时采集多个油缸的实际推力,合并多个油缸的实际推力得到该实际总推力;
20.在进行步骤s4时,将得到的该修正量根据各该油缸的位置拆分成多个分修正量,根据多个该分修正量一一对应地控制多个该油缸进行推进。
21.本发明盾构机相对于隧道轴线的姿态自动修正方法进一步改进在于,在进行步骤s1和步骤s2的同时进行步骤s3和步骤s4。
22.本发明和已有技术相比较,其效果是积极和明显的。本发明根据目标位置设置输入量,并对实际位置进行测量和反馈,得到输入量与反馈量的偏差,再根据偏差调整输入量,进而形成一个闭环控制系统,通过该闭环控制系统对盾构机相对于隧道轴线的姿态进行实时高效的自动修正,解决了现有技术中在盾构机难以准确地修正盾构机姿态的技术问题,使盾构机的姿态调整的效果佳,对整个盾构机机头的掘进角度做精密的控制,对盾构机推进油缸出力大小精准控制,从而使盾构机的姿态精准可控。
附图说明
23.图1为本发明的盾构机相对于隧道轴线的姿态自动修正系统的系统框图。
24.图2为本发明的盾构机相对于隧道轴线的姿态自动修正方法的流程图。
25.图3为本发明利用盾构机相对于隧道轴线的姿态自动修正方法进行修正的实施例示意图。
具体实施方式
26.以下结合附图和实施例对本发明作进一步描述。
27.如图1所示,本发明的盾构机相对于隧道轴线的姿态自动修正系统,包括:
28.第一采集模块,用于实时采集盾构机位置、隧道轴线位置;
29.角度纠偏模块,包括:用于根据该盾构机位置和该隧道轴线位置确认出盾构机轴线偏离该隧道轴线位置的水平偏差角度和竖直偏差角度的偏差角度计算单元;用于控制盾构机根据该水平偏差角度执行水平方向偏转以及根据该竖直偏差角度执行竖直方向偏转的角度纠偏控制单元;
30.第二采集模块,用于实时采集盾构机的实际总推力;
31.推力纠偏模块,包括:用于将该实际总推力的实际水平总分力和实际竖直总分力分别与相应预设的目标水平总分力和目标竖直总分力进行比较并得到该实际总推力的修正量的推力修正单元;用于根据该修正量修正当前相应该实际总推力并控制盾构机进行推进的推进控制单元。
32.第一采集模块采集信息时,还需要采集盾构机尾部与隧道内壁的间隙,以控制盾构机在合理的间隙内偏转。该推力纠偏模块为基础算法单元,计算推进油缸的推进速度所产生的推力的修正后准确的推力大小和推力方向,使盾构机掘进偏转地更加准确,贴合隧道设计轴线。
33.优选的,还包括自适应控制模块,用于收集第一采集模块和第二采集模块的数据信息,并根据该数据信息对该盾构机的实际推进姿态进行预估并形成对该水平偏差角度、竖直偏差角度和该修正量的调整策略,该自适应控制模块与该第一采集模块、该偏差角度计算单元和该推力修正单元建立双向数据连接。
34.该系统通过自适应控制模块加入了自适应控制的功能,该自适应控制功能包括盾构机姿态的估计(辨别)、盾构机转向的决策和盾构机转向的修改三个环节,使盾构机始终处于最优工作状态。
35.优选的,该盾构机上设有用于实现该盾构机推进的多个油缸;
36.该第二采集模块,包括:一一对应采集多个油缸的实际推力的多个采集单元;用于将多个油缸的实际推力合并成该实际总推力的合并计算单元;
37.该推进控制单元,包括:用于将该修正量根据各该油缸的位置拆分成多个分修正量,的差分计算单元;用于根据多个该分修正量一一对应地控制多个该油缸进行推进的油缸控制单元。
38.将修正量分至每个推进油缸进行推进实施,从而使每个推进油缸的推进的推力准确,并减小误差。
39.如图2所示,本发明还提供了一种盾构机相对于隧道轴线的姿态自动修正方法,包括如下步骤:
40.s1:实时采集盾构机位置、隧道轴线位置,并确认出盾构机轴线偏离该隧道轴线位置的水平偏差角度和竖直偏差角度;
41.s2:实时控制盾构机根据当前水平偏差角度执行水平方向偏转,根据当前竖直偏差角度执行竖直方向偏转;
42.s3:实时采集盾构机的实际总推力,并将该实际总推力的实际水平总分力和实际竖直总分力分别与相应预设的目标水平总分力和目标竖直总分力进行比较得到该实际总推力的修正量;
43.s4:实时控制盾构机根据当前修正量修正当前实际总推力并控制盾构机进行推
进。
44.在步骤s2中可选择盾构机的中心轴线与隧道轴线之间的角度来确定偏差角度,步骤s4通过pid系统自适应调节与控制,并实时监控盾构机的位置,在盾构机偏离隧道轴线时及时进行偏转及位置修正,大大提高了盾构机转向及修正的准确程度。
45.优选的,该盾构机上设有用于实现该盾构机推进的多个油缸;
46.在进行步骤s3时,分别实时采集多个油缸的实际推力,合并多个油缸的实际推力得到该实际总推力;
47.在进行步骤s4时,将得到的该修正量根据各该油缸的位置拆分成多个分修正量,根据多个该分修正量一一对应地控制多个该油缸进行推进。
48.如图3所示作为本发明的一实施例,实际总推力∑f1为所有推进油缸分区的f1、f2、f3、f4、f5、f6
……
的合力;修正后第一次实施推力的各油缸的分力为f1
△
、f2
△
、f3
△
、f4
△
、f5
△
、f6
△
……
,各油缸第一次实施推力的分力的合力为∑f1
△
。
49.计算修正后实施的第一次总推力∑f1
△
:通过盾构机在人工推进时各推进油缸的压力以及盾构机的结构形式,计算出实际总推力∑f1的力矩点坐标[(m1
x
,m1
y
),f1],f1为力的大小,实施了第一次总推力后a点移动至b点位置,得到a点位置移动至b点位置水平变化量
△
m
x
和竖直变化量
△
m
y
,再通过a点的水平坐标m1
x
加上水平变化量
△
m
x
得到b点的水平坐标m1
x
+
△
m
x
,通过a点的竖直坐标m1
y
加上竖直变化量
△
m
y
得到b点的竖直坐标m1
y
+
△
m
y
,即得到b点的坐标即为第一次总推力的坐标∑f1
△
:[(m1
x
+
△
m
x
,m1
y
+
△
m
y
),f1],b点的坐标为在计算了修正力后第一次实施的总推力,将b点的坐标与实施目标推力后的坐标再次比较,如还存在偏差,则再次进行修正比较,直至与实施目标推力后的坐标相同为止。该推力纠偏模块通过力矩点的位移坐标计算,相比于现有技术中的单纯依靠司机调整盾构机的减压阀调节推进油缸的推力而达到盾构机姿态修正的目的,该力矩计算的方式更加精准,减少了人工操作的误差。
[0050]
优选的,在进行步骤s1和步骤s2的同时进行步骤s3和步骤s4。
[0051]
通过对盾构机的偏差角度和推力的同时修正,使系统整体修正的过程加快,从而使盾构机的姿态更加贴合设计隧道轴线,并提高施工效率,提高工程质量。
[0052]
本发明根据目标位置设置输入量,并对实际位置进行测量和反馈,得到输入量与反馈量的偏差,再根据偏差调整输入量,进而形成一个闭环控制系统,通过该闭环控制系统对盾构机相对于隧道轴线的姿态进行实时高效的自动修正,解决了现有技术中在盾构机难以准确地修正盾构机姿态的技术问题,使盾构机的姿态调整的效果佳,对整个盾构机机头的掘进角度做精密的控制,对盾构机推进油缸出力大小精准控制,从而使盾构机的姿态精准可控。
[0053]
以上所述仅是本发明的较佳实施例而已,并非对本发明做任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案的范围内,当可利用上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1