一种具有遥控功能的钻机的制作方法
1.本发明涉及钻井装置领域,具体涉及一种具有遥控功能的钻机。
背景技术:
2.钻井装置的工作原理主要是通过钻机上动力装置带动钻杆上钻头旋转进行作业,使得地表面形成井孔。钻机的钻孔深度为50
‑
1000米。在钻井的过程中,会有大量泥水从井孔内喷出。
3.现有钻井装置的操作台一般设于钻杆一侧,在钻井的过程中,泥水从井孔内喷出,而操作人员仅能依靠伞或遮阳棚做简陋的遮蔽,工作环境十分恶劣。此外,随着钻孔深度的不断加深,需要使用更长的钻杆进行作业。而现有装置无法快速安装或更换钻杆。
4.因此,钻井装置领域需要一种可以进行远程遥控,保护操作者健康,且可以自行更换或安装钻杆的装置。
技术实现要素:
5.本发明的目的在于克服上述问题,提供一种具有遥控功能的钻机。为实现上述目的,本发明采用如下技术方案:
6.一种具有遥控功能的钻机,包括机座、控制台、钻井平台和遥控装置,所述控制台设于机座上,所述钻井平台与机座铰接,并通过液压杆控制钻井平台角度,所述控制台内置遥控液压控制阀,所述遥控装置通过遥控液压控制阀控制控制台工作;
7.所述钻井平台包括塔架、升降组件、马达回转动力箱和钻杆,所述塔架与机座铰接,所述钻杆设于马达回转动力箱输出端,所述马达回转动力箱由升降组件控制高度。
8.作为改进,所述升降组件包括设于塔架顶部的升降横梁和负载马达回转动力箱的升降平台,所述升降横梁通过第二液压杆与塔架活动连接,所述塔架上设有供升降平台活动的滑轨,所述升降横梁上设有上传动轮,所述塔架底部设有下传动轮,所述上传动轮、下传动轮均通过传动带带动升降平台运动,所述升降组件还包括驱动上传动轮、下传动轮以及传动带转动的卷扬机。
9.作为改进,所述上传动轮的数量为两个,所述上传动轮对应的传动带数量也为两个。
10.作为改进,所述钻井平台一侧设有机械臂,所述机械臂包括底座、l型弯臂和夹持头,所述l型弯臂两端分别与底座、夹持头铰接,所述底座上设有带动l型弯臂旋转的旋转组件,所述l型弯臂下方设有抬升l型弯臂的第三液压杆。
11.作为改进,所述主钻杆下方设有保护圈。
12.作为改进,所述机械臂对侧设有小吊,所述管道夹持组件包括立柱、液压伸缩杆和吊装头,所述立柱与机座固定连接,所述液压伸缩杆与立柱转动连接,所述吊装头设于液压伸缩杆末端。
13.作为改进,所述机座底部设有履带,所述机座四周设有四个支撑柱。
14.作为改进,所述控制台上设有控制履带行走的左控制杆和右控制杆;控制马达回转动力箱及钻杆工作状态的轴压旋钮、反轴压旋钮、回转调速旋钮、回转方向控制杆以及合流提升控制杆;所述控制台上设有控制升降平台推进控制杆、快推进控制杆、卷扬机控制杆和塔架起落控制杆;所述底座上设有控制机械臂的旋转控制杆、夹持头控制杆、出杆控制杆以及控制小吊起落的小吊控制杆;
15.上述所有控制杆均采用遥控液压阀控制,并被遥控装置遥控。
16.本发明的优点在于:
17.本发明具有远程遥控功能,通过遥控装置可以控制钻井装置进行钻井作业。操作者仅需要在远处遥控操作即可,无需在钻井装置附近进行操作。本发明可以有效防止操作者暴露在泥水中,有效改善操作者的工作环境。
18.本发明的机械臂可以在远程操控的条件下更换或安装钻杆,安装精度高、效率高。
附图说明
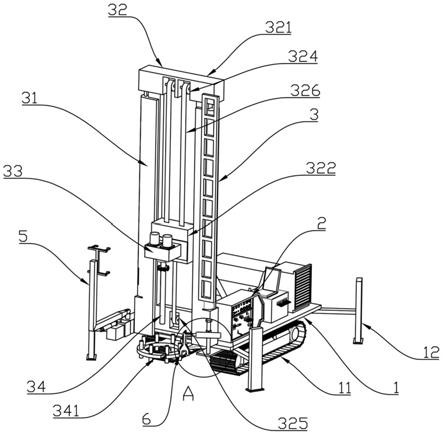
19.图1为实施例1中一种具有遥控功能的钻机的结构图;
20.图2为实施例1中一种具有遥控功能的钻机的侧视图;
21.图3为实施例1中一种具有遥控功能的钻机中机械臂的结构图;
22.图4为实施例1中一种具有遥控功能的钻机a处的放大图;
23.图5为实施例1中一种具有遥控功能的钻机中控制台的结构图;
24.图6为实施例1中一种具有遥控功能的钻机中升降组件处于抬升状态时的结构图。
25.图中标识为:
[0026]1‑
机座,11
‑
履带,12
‑
支撑柱,2
‑
控制台,211
‑
左控制杆,212
‑
右控制杆,221
‑
轴压旋钮,222
‑
反轴压旋钮,223
‑
回转调速旋钮,224
‑
回转方向控制杆,225
‑
合流提升控制杆,231
‑
推进控制杆,232
‑
快推进控制杆,233
‑
卷扬机控制杆,234
‑
塔架起落控制杆,241
‑
旋转控制杆,242
‑
夹持头控制杆,243
‑
出杆控制杆,244
‑
小吊控制杆,3
‑
钻井平台,31
‑
塔架,32
‑
升降组件,321
‑
升降横梁,322
‑
升降平台,323
‑
第二液压杆,324
‑
上传动轮,325
‑
下传动轮,326
‑
传动带,33
‑
马达回转动力箱,34
‑
钻杆,341
‑
保护圈,4
‑
液压杆,5
‑
机械臂,51
‑
底座,52
‑
l型弯臂,53
‑
夹持头,54
‑
旋转组件,55
‑
第三液压杆,6
‑
小吊,61
‑
立柱,62
‑
液压伸缩杆,63
‑
吊装头。
具体实施方式
[0027]
下面通过具体实施例对本发明进行详细和具体的介绍,以使更好的理解本发明,但是下述实施例并不限定本发明的保护范围。
[0028]
实施例1
[0029]
本实施例公开了一种具有遥控功能的钻机,包括机座1、控制台2、钻井平台3和遥控装置。控制台2设于机座1上,钻井平台3与机座1铰接,并通过液压杆4控制钻井平台2角度。控制台2内置遥控液压控制阀,遥控装置通过遥控液压控制阀控制控制台2工作。
[0030]
钻井平台3包括塔架31、升降组件32、马达回转动力箱33和钻杆34,钻杆34下方设有保护圈341。塔架31与机座1铰接,钻杆34设于马达回转动力箱33输出端,马达回转动力箱33由升降组件32控制高度。
[0031]
升降组件32包括设于塔架31顶部的升降横梁321和负载马达回转动力箱的升降平台322,升降横梁321通过第二液压杆323与塔架31活动连接,塔架31上设有供升降平台322活动的滑轨311,升降横梁321上设有上传动轮324,塔架31底部设有下传动轮325,上传动轮324、下传动轮325均通过传动带326带动升降平台322运动。升降组件32还包括驱动上传动轮324、下传动轮325以及传动带326转动的卷扬机,卷扬机设于塔架31背面。
[0032]
上传动轮324的数量为两个,上传动轮324对应的传动带326数量也为两个。下传动轮325及其对应的传动带326的数量为一个。
[0033]
钻井平台3一侧设有机械臂5。机械臂5包括底座51、l型弯臂52和夹持头53。l型弯臂52两端分别与底座51、夹持头53铰接,底座51上设有带动l型弯臂52旋转的旋转组件54,l型弯臂52下方设有抬升l型弯臂52的第三液压杆55。旋转组件可以实现l型弯臂52水平方向上的旋转,第三液压杆55可以推动l型弯臂52垂直方向上的转动,夹持头53在遥控装置的控制下可以夹持住钻杆34,以便进行钻杆34的组装和更换。
[0034]
机械臂5对侧设有小吊6。小吊6包括立柱61、液压伸缩杆62和吊装头63,立柱61与机座1固定连接,液压伸缩杆62与立柱61转动连接,吊装头63设于液压伸缩杆62末端。
[0035]
机座1底部设有履带11,机座1四周设有四个支撑柱12。
[0036]
控制台2上设有控制履带11行走的左控制杆211和右控制杆212;控制马达回转动力箱33及钻杆34工作状态的轴压旋钮221、反轴压旋钮222、回转调速旋钮223、回转方向控制杆224以及合流提升控制杆225;控制台2上设有控制升降平台322的推进控制杆231、快推进控制杆232、卷扬机控制杆233和塔架起落控制杆234;底座51上设有控制机械臂5的旋转控制杆241、夹持头控制杆242、出杆控制杆243以及控制小吊6起落的小吊控制杆244;上述所有控制杆均采用遥控液压阀控制,并被遥控装置遥控。
[0037]
本实施例中,第二液压杆323可以将升降横梁321向上顶起,同时通过卷扬机带动传动带326和上、下传动轮即可快速控制升降平台322向上抬升,达到快推进的效果。若单独使用第二液压杆323或卷扬机可以慢速抬升或降低升降平台322,达到慢推进的效果。
[0038]
当钻杆34抬升到一定程度,可以控制机械臂5的旋转组件54旋转,使夹持头53处于钻杆34正下方,然后夹持头53夹持钻杆34即可完成钻杆34的拆卸,然后夹持头53夹持长钻杆,以同样方式既可以完成钻杆34的更换和安装。由于处于工作状态下的机械臂5延伸出装置前端较长的长度,在装置的运送过程中不易安置,因此设置第三液压杆55,当第三液压杆55伸长,可以将机械臂5收纳至塔架31后方。
[0039]
本发明具有远程遥控结构,操作员可以站在远处对装置进行操作,以改善操作员在作业过程中的作业环境,保护操作员的身心健康。
[0040]
以上对本发明的具体实施例进行了详细描述,但其只是作为范例,本发明并不等同于以上描述的具体实施例。对于本领域技术人员而言,任何对本发明进行的等同修改和替代也都在本发明的范畴之中。因此,不脱离本发明的精神和范围下所做的均等变换和修改,都应涵盖在本发明的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1