一种寻孔系统的传动机构、寻孔系统及掘锚护一体机的制作方法
1.本发明涉及清洁设备领域,具体而言涉及一种寻孔系统的传动机构、寻孔系统及掘锚护一体机。
背景技术:
2.目前,在煤矿巷道开拓时,使用掘进机进行掘进,在掘进后需要再进行锚护作业。掘锚护一体机将掘进功能、锚杆作业功能和支护功能集合在同一机器上,使用者通过掘锚护一体机即可实现三个功能的操作。
3.现有的掘锚护一体机通过机械臂带动锚杆的移动,但是机械臂一般采用连杆机构,灵活度低,不能满足复杂环境的需求。
技术实现要素:
4.有鉴于此,本发明实施例提供了一种寻孔系统的传动机构、寻孔系统及掘锚护一体机,以解决现有的掘锚护一体机通过机械臂带动锚杆的移动,但是机械臂一般采用连杆机构,灵活度低,不能满足复杂环境的需求的问题。
5.第一方面,本发明实施例提供了一种寻孔系统的传动机构,包括支架、第一连接架、第一驱动部、第二驱动部、第二连接架及滑轨,所述第一连接架用于固定机械臂;
6.所述第一连接架的一端与所述第一驱动部的一端铰接,所述第一连接架的另一端与所述支架的前端铰接,所述第一驱动部的另一端与所述支架铰接;
7.所述第二连接架与所述支架的后端铰接,所述第二驱动部的一端与所述支架铰接,所述第二驱动部的另一端与所述第二连接架铰接;
8.所述滑轨穿设于所述第二连接架。
9.具体地,所述支架包括第一支撑板、第一连接板及第二连接板;
10.所述第一连接板固定在所述第一支撑板的下部,所述第二连接板固定在所述第一支撑板的上部,所述第一连接板与所述第一连接架铰接,所述第二连接板与所述第一驱动部铰接,所述第一支撑板与所述第二连接架铰接。
11.具体地,所述第二连接板向上倾斜设置。
12.具体地,所述第一连接板为三角板。
13.具体地,所述第二连接架包括第二支撑板、第三连接板及滑块;
14.所述第二支撑板与所述第三连接板连接,且所述第三连接板垂直于所述第二支撑板,所述滑块固定在所述第二支撑板上;所述第二支撑板与所述第一支撑板铰接,所述第三连接板的顶端与所述第二驱动部铰接。
15.具体地,所述滑块的数量为两个,且两个所述滑块并排排列。
16.具体地,所述滑轨包括滑道,所述滑道的两端分别设有限位部。
17.具体地,所述第一驱动部及第二驱动部为液压装置。
18.第二方面,本发明的实施例提供了一种寻孔系统,包括机械臂、视觉装置、控制器
及上述任一方案的传动机构,所述传动机构上设有传感器,所述控制器分别与所述视觉装置、传动机构及传感器连接,所述视觉装置包括摄像部及光源。
19.第三方面,本发明的实施例提供了一种掘锚护一体机,包括机身以及上述方案的寻孔系统。
20.根据本发明实施例提供的一种寻孔系统的传动机构、寻孔系统及掘锚护一体机,利用第一驱动部及第二驱动部的驱动,从而可以实现机械臂的俯仰摆动及左右摆动,并且通过在滑轨上滑动,从而实现机械臂的平动,由此就能够实现机械臂在三个维度上的运动,从而提高了机械臂的灵活性,能够满足复杂环境的需求。
附图说明
21.本发明的下列附图在此作为本发明实施例的一部分用于理解本发明。附图中示出了本发明的实施例及其描述,用来解释本发明的原理。
22.附图中:
23.图1为根据本发明的一个可选实施例的一种寻孔系统的传动机构的侧视图;
24.图2为根据本发明的一个可选实施例的一种寻孔系统的传动机构的后视图;
25.图3为根根据本发明的一个可选实施例的第二连接架的结构图;
26.图4为液压装置的结构图。
27.附图标记说明:
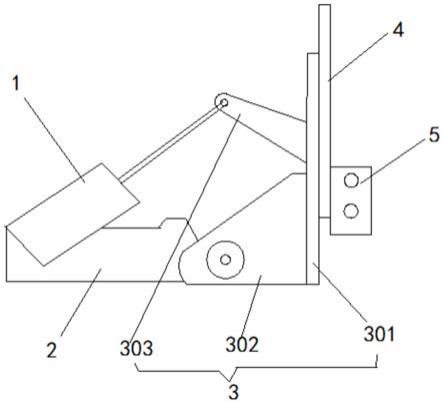
28.1-第一驱动部,2-第一连接架,3-支架,301-第一支撑板,302-第一连接板,303-第二连接板,4-第二连接架,401-第三连接板,402-滑块,403-第二支撑板,5-滑轨,501-滑道,502-限位部,6-第二驱动部,7-油箱,8-液压油泵,9-电控液压阀,10-液压油缸,11-传感器。
具体实施方式
29.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
30.应予以注意的是,这里所使用的术语仅是为了描述具体实施例,而非意图限制根据本发明的示例性实施例。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式。此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、整体、步骤、操作、元件和/或组件,但不排除存在或附加一个或多个其他特征、整体、步骤、操作、元件、组件和/或它们的组合。
31.现在,将参照附图更详细地描述根据本发明的示例性实施例。然而,这些示例性实施例可以多种不同的形式来实施,并且不应当被解释为只限于这里所阐述的实施例。应当理解的是,提供这些实施例是为了使得本发明的公开彻底且完整,并且将这些示例性实施例的构思充分传达给本领域普通技术人员。
32.第一方面,如图1和图2所示,本发明实施例提供了一种寻孔系统的传动机构,包括支架3、第一连接架2、第一驱动部1、第二驱动部6、第二连接架4及滑轨5,第一连接架2用于固定机械臂;第一连接架2的一端与第一驱动部1的一端铰接,第一连接架2的另一端与支架
3的前端铰接,第一驱动部1的另一端与支架3铰接;第二连接架4与支架3的后端铰接,第二驱动部6的一端与支架3铰接,第二驱动部6的另一端与第二连接架4铰接;滑轨5穿设于第二连接架4。
33.其中,如图4所示,第一驱动部1及第二驱动部6为液压装置,具体包括顺次连接的油箱7、液压油泵8、电控液压阀9及液压油缸10,液压油经由电控液压阀9的控制,流入液压由缸10或者从液压油缸10流出,从而使液压油缸10内的伸缩杆伸长或缩回。液压装置能够满足移动自如,同时可承受自重及工作载荷;并且液压装置控制精度高,可实现钻机钻孔轴线与预制钢带孔位找准后误差不大于
±
5mm;另外液压装置安装在掘进机设备上,通过液压系统柔性控制能够适应井下开采的振动环境。
34.具体而言,第一驱动部1的伸缩运动,从而带动第一连接架2绕与支架3的铰接点转动,以实现机械臂的俯仰摆动;第二驱动部6的伸缩运动,从而带动支架3绕与第二连接架4的铰接处转动,以实现机械臂的左右摆动。通过使第二连接架4沿滑轨5滑动,从而能够实现机械臂的平移运动,第二连接架4的平移运动可由在第二连接架4上设置驱动部件实现,例如液压装置,本实施例对驱动部件不做严格限定。
35.根据本发明实施例提供的一种寻孔系统的传动机构及寻孔系统,利用第一驱动部1及第二驱动部6的驱动,从而可以实现机械臂的俯仰摆动及左右摆动,并且通过在滑轨5上滑动,从而实现机械臂的平动,由此就能够实现机械臂在三个维度上的运动,从而提高了机械臂的灵活性,能够满足复杂环境的需求。
36.在上述实施例中,如图1、图2和图3所示,支架3包括第一支撑板301、第一连接板302及第二连接板303;第一连接板302固定在第一支撑板301的下部,第二连接板303固定在第一支撑板301的上部,第一连接板302与第一连接架2铰接,第二连接板303与第一驱动部1铰接,第一支撑板301与第二连接架4铰接。
37.第二连接架4包括第二支撑板403、第三连接板401及滑块402;第二支撑板403与第三连接板401连接,且第三连接板401垂直于第二支撑板403,滑块402固定在第二支撑板403上;第二支撑板403与第一支撑板301铰接,第三连接板401的顶端与第二驱动部6铰接。
38.在具体应用中,当第一驱动部1伸长时,第一驱动部1带动第一连接架2向下转动,这样就能够带动机械臂向下运动;当第一驱动部1缩短时,第一驱动部1带动第二连接架4向上运动,这样就能够带动机械臂向上运动,从而实现机械臂的俯仰摆动。
39.当第二驱动部6伸长时,第二驱动部6带动第一支撑板301向左转动,这样就能够带动机械臂向左转动;当第二驱动部6缩短时,第二驱动部6带动第一支撑板301向右转动,这样就能够带动机械臂向右转动,从而实现机械臂的左右摆动。
40.进一步地,如图1所示,第二连接板303向上倾斜设置,从而能够增加第一驱动部1的行程,进而增加机械臂的俯仰角度,以进一步增加机械臂的灵活度。
41.进一步地,如图1所示,第一连接板302为三角板。三角板结构既能够保证连接的稳固性,又能降低第一连接板302的重量,从而降低整个传动机构的重量。
42.进一步地,如图3所示,滑块402的数量为两个,且两个滑块402并排排列。两个滑块402能够提高滑动的稳定性。
43.进一步地,如图2所示,滑轨5包括滑道501,滑道501的两端分别设有限位部502。限位部502可防止滑块402滑到滑轨5的端部时,易从滑到的端部滑落的情况发生。
44.进一步地,滑道501的数量为两个,且两个滑道501上下设置。设置两个滑到能够使滑动过程更加稳定,并且两个滑道501的端部可共用一个显现部,这样既可起到限位的作用,又能起到连接滑道501的作用,使滑轨5的结构更加紧凑。
45.第二方面,本发明一种寻孔系统,包括机械臂、视觉装置、控制器及上述任一方案的传动机构,传动机构上设有传感器11,控制器分别与视觉装置、传动机构及传感器11连接。
46.具体而言,在掘锚护一体机进行锚杆作业时,视觉传感器11可用来采集视觉图像,传动机构依据视觉系统信息反馈的图像信息并通过坐标转换得到目标位置,以及传动机构中第一连接架2及第一支撑板301的转动角度,控制器对钻机的运动轨迹规划,然后根据规划的路径,控制传动机构运动,从而使机械臂带动锚杆对准目标位置。
47.其中,传感器11为油缸磁滞位移传感器或角度传感器。
48.油缸磁滞位移传感器反馈油缸位移偏差到控制器,然后控制器控制补偿电磁阀发送脉宽调制信号(pwm),使电控液压阀9进行准比例流量控制,将相应的补偿油量添加至液压油缸10以消除偏差,实现精准控制。根据电液系统的参数模型,搭建电液伺服系统仿真模型,并根据液压装置的实际应用,进行仿真分析,液压装置可实现控制油缸位移精度不大于0.1mm。
49.具体地,视觉装置包括摄像部及光源。其中,摄像部可用来采集视觉图像,光源可增加环境的亮度,从而使视觉图像更加清晰,提高识别的准确度。
50.第三方面,本发明的实施例提供了一种掘锚护一体机,包括机身以及上述方案的寻孔系统。
51.本发明已经通过上述实施例进行了说明,但应当理解的是,上述实施例只是用于举例和说明的目的,而非意在将本发明限制于所描述的实施例范围内。此外本领域技术人员可以理解的是,本发明并不局限于上述实施例,根据本发明的教导还可以做出更多种的变型和修改,这些变型和修改均落在本发明所要求保护的范围以内。本发明的保护范围由附属的权利要求书及其等效范围所界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1